También podría gustarte
- Apu 57a Protocolo Covid-19Documento2 páginasApu 57a Protocolo Covid-19Brayan Camilo Díaz RiveraAún no hay calificaciones
- Informe Reflexivo Sistema Financiero ColombianoDocumento3 páginasInforme Reflexivo Sistema Financiero ColombianoAdalberto Mercado CastroAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Paso 5 - Reportes de Información Exógena TributariaDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Paso 5 - Reportes de Información Exógena TributariaAdalberto Mercado CastroAún no hay calificaciones
- Fase4 YURISPEREZ ALVAROCAÑAVERADocumento25 páginasFase4 YURISPEREZ ALVAROCAÑAVERAAdalberto Mercado CastroAún no hay calificaciones
- Anexo Paso 4Documento30 páginasAnexo Paso 4Adalberto Mercado CastroAún no hay calificaciones
- Fase4 YurisperezDocumento27 páginasFase4 YurisperezAdalberto Mercado CastroAún no hay calificaciones
- Problema 1 Pasivos AdalbertoDocumento17 páginasProblema 1 Pasivos AdalbertoAdalberto Mercado CastroAún no hay calificaciones
- Anexo-Paso 4 - JohnVelasquezDocumento84 páginasAnexo-Paso 4 - JohnVelasquezAdalberto Mercado CastroAún no hay calificaciones
- Emprendimiento IndividualDocumento6 páginasEmprendimiento IndividualAdalberto Mercado CastroAún no hay calificaciones
- Actividad IndividualDocumento8 páginasActividad IndividualAdalberto Mercado CastroAún no hay calificaciones
- Nanomateriales en Las Ciencias de La VidaDocumento50 páginasNanomateriales en Las Ciencias de La VidaJoseLuisRamirez26Aún no hay calificaciones
- Leyes de Semejanza en BombasDocumento29 páginasLeyes de Semejanza en BombasJavier Rojas TrujilloAún no hay calificaciones
- El Reto de La Administración de Recursos HumanosDocumento2 páginasEl Reto de La Administración de Recursos HumanosAnita JanielAún no hay calificaciones
- Cómo Han Influido Las TICDocumento12 páginasCómo Han Influido Las TICMichelle RodriguezAún no hay calificaciones
- Taller de Proyecto de Especialidad: Lienzo CanvasDocumento2 páginasTaller de Proyecto de Especialidad: Lienzo Canvasveronica reyes acevedoAún no hay calificaciones
- Actividad 1Documento2 páginasActividad 1Nazario Flores T.Aún no hay calificaciones
- Iis Guia 4 5 GradoDocumento3 páginasIis Guia 4 5 Gradocarlos alberto meza meza100% (2)
- Constancia de InscripcionDocumento1 páginaConstancia de Inscripcionkhristell avalos quintanaAún no hay calificaciones
- Deber Investigacion Calculo OrdoñezDocumento7 páginasDeber Investigacion Calculo OrdoñezGabyAún no hay calificaciones
- Inmotica y Urbotica Y SIMBOLOGIADocumento16 páginasInmotica y Urbotica Y SIMBOLOGIAMaria isabel Limpias romeroAún no hay calificaciones
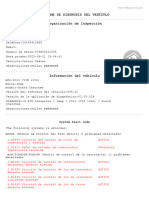
- Jeep AllSystemDTC 20230821150441Documento4 páginasJeep AllSystemDTC 20230821150441carlosAún no hay calificaciones
- Resumen Individual Tema 2Documento5 páginasResumen Individual Tema 2Raylin Ismael MordanAún no hay calificaciones
- Contrato Productos Servicios BancariosDocumento30 páginasContrato Productos Servicios Bancariosmsam73203Aún no hay calificaciones
- Triptico Ya ListoDocumento2 páginasTriptico Ya ListoYorfran Florez valeraAún no hay calificaciones
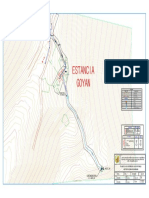
- Saneamiento Gogan-Pachapaqui PDFDocumento1 páginaSaneamiento Gogan-Pachapaqui PDFFredd XpAún no hay calificaciones
- Nuevas Tecnologías, Derecho y Transformaciones SocialesDocumento5 páginasNuevas Tecnologías, Derecho y Transformaciones SocialesJose PiñaAún no hay calificaciones
- Sesion 1 PlanificacionDocumento11 páginasSesion 1 PlanificacionSoledad Tapia ContrerasAún no hay calificaciones
- Informatica Valeria Lamina IlustradaDocumento2 páginasInformatica Valeria Lamina IlustradaSacha Romero MujicaAún no hay calificaciones
- PROYECTO 1 No 4Documento28 páginasPROYECTO 1 No 4Beto Perea AguilaAún no hay calificaciones
- (Semana 06) Preguntas TallerDocumento3 páginas(Semana 06) Preguntas TallerJonathan VegaAún no hay calificaciones
- Los Transistores SMDDocumento2 páginasLos Transistores SMDLuis BerlopAún no hay calificaciones
- Practica 2 CESDocumento12 páginasPractica 2 CESDieGo MioAún no hay calificaciones
- (Primera Convocatoria) : Estado Plurinacional de BoliviaDocumento44 páginas(Primera Convocatoria) : Estado Plurinacional de BoliviaEdwin Huanca AlbaradoAún no hay calificaciones
- Finales Roscardi Instalaciones 2Documento6 páginasFinales Roscardi Instalaciones 2Agus SuarezAún no hay calificaciones
- Examen de Recursividad-Estructuras LinealesDocumento12 páginasExamen de Recursividad-Estructuras LinealesRafael RizoAún no hay calificaciones
- Entrega Final Eia - pc2Documento15 páginasEntrega Final Eia - pc2ana rosaAún no hay calificaciones
- Connecting Things 2.0 Instructor Supplemental Materials Chapter5Documento28 páginasConnecting Things 2.0 Instructor Supplemental Materials Chapter5PEDRO JUNNIOR AZABACHE CRUZAún no hay calificaciones
- 100% de Grand Theft Auto - Vice City - Grand Theft Encyclopedia - FandomDocumento5 páginas100% de Grand Theft Auto - Vice City - Grand Theft Encyclopedia - FandomFede ModestiAún no hay calificaciones
- Control de Temperatura Termostato Digital Programable W12Documento3 páginasControl de Temperatura Termostato Digital Programable W12Gabriel MorroneAún no hay calificaciones