También podría gustarte
- Sesion11-Comunicación Serial 2021-n Sesion11Documento39 páginasSesion11-Comunicación Serial 2021-n Sesion11Johan Christhofer Armas ValenciaAún no hay calificaciones
- Informe RS 232 RecuperacionDocumento11 páginasInforme RS 232 RecuperacionJuanSe Vasquez CrissAún no hay calificaciones
- Puerto SerialDocumento17 páginasPuerto SerialCarlos TurrizaAún no hay calificaciones
- Informe 5Documento6 páginasInforme 5-Pendexxx- 20Aún no hay calificaciones
- RS232Documento8 páginasRS232Luis FernandoAún no hay calificaciones
- Guía Práctica 5 Comunicación TTL y I2CDocumento8 páginasGuía Práctica 5 Comunicación TTL y I2CPESQUERA ACUICOLAAún no hay calificaciones
- Practica 4Documento10 páginasPractica 4Jairo M. CovarrubiasAún no hay calificaciones
- Protocolo de Comunicación UARTDocumento17 páginasProtocolo de Comunicación UARTJuan PachonAún no hay calificaciones
- Comunicacion Serial PDFDocumento21 páginasComunicacion Serial PDFViki AguirreAún no hay calificaciones
- Uart y UsartDocumento5 páginasUart y UsartMdmrAún no hay calificaciones
- Informe Labo 5 de Microprocesadores UnivalleDocumento6 páginasInforme Labo 5 de Microprocesadores UnivalleAldrinTorrezChallapaAún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Tutorial Comunicacion SerialDocumento9 páginasTutorial Comunicacion SerialMartín SayagoAún no hay calificaciones
- Comunicación Serial RS232 PIC16F877ADocumento6 páginasComunicación Serial RS232 PIC16F877AEduardohrdz HernandezAún no hay calificaciones
- Puerto SerialDocumento43 páginasPuerto SerialDavid AguilarAún no hay calificaciones
- Descripción Del CircuitoDocumento7 páginasDescripción Del CircuitoJavier SarangoAún no hay calificaciones
- Comunicacion SerialDocumento15 páginasComunicacion SerialFátima Daniela González MateoAún no hay calificaciones
- Presentación Puerto SerieDocumento24 páginasPresentación Puerto SerieluropatAún no hay calificaciones
- P10 Comunicacion Serial RS232Documento8 páginasP10 Comunicacion Serial RS232Ans Shel Cardenas YllanesAún no hay calificaciones
- ConsultaDocumento9 páginasConsultaAlex AcostaAún no hay calificaciones
- Capitulo 8 USARTDocumento12 páginasCapitulo 8 USARTfercho2373Aún no hay calificaciones
- Laboratorio 4 - Comunicación Mediante Puerto Serial UartDocumento4 páginasLaboratorio 4 - Comunicación Mediante Puerto Serial UartMiguel Godoy Escobar100% (1)
- Proyecto de InvestigacionDocumento10 páginasProyecto de InvestigacionIvonne Olarte TinocoAún no hay calificaciones
- Puerto Serie y ParaleloDocumento7 páginasPuerto Serie y ParaleloYordael BoescheAún no hay calificaciones
- Dimer CadenasDocumento66 páginasDimer CadenasGustavo Adolfo Ramirez PiedrahitaAún no hay calificaciones
- Capitulo 8 USARTDocumento7 páginasCapitulo 8 USARTrickypinaAún no hay calificaciones
- OmarDocumento8 páginasOmarOmar Navia CondoriAún no hay calificaciones
- Significado de Serial y La Sigla COM RS-232Documento5 páginasSignificado de Serial y La Sigla COM RS-232Aroni AbarcaAún no hay calificaciones
- U2.5 - Comunicacion Serie AsincronaDocumento7 páginasU2.5 - Comunicacion Serie AsincronaElias FernandezAún no hay calificaciones
- Comunicación SerialDocumento52 páginasComunicación SerialLebni Zaabdi Lopez MelchorAún no hay calificaciones
- Sensores en Red Rs-485Documento5 páginasSensores en Red Rs-485gdilioAún no hay calificaciones
- Comunicacion Serial 2PIC-InFORMEDocumento7 páginasComunicacion Serial 2PIC-InFORMEErik Quijije ZambranoAún no hay calificaciones
- Tarea 5. SEDocumento5 páginasTarea 5. SEAldo Sebastián Bustamante JoséAún no hay calificaciones
- Comunicaciones Entre El Robot y El PC Mediante El Puerto SerieDocumento8 páginasComunicaciones Entre El Robot y El PC Mediante El Puerto SerieJesus VasquezAún no hay calificaciones
- Tutorial Puertos 74ls373Documento19 páginasTutorial Puertos 74ls373ab_chilangoAún no hay calificaciones
- Protocolos I2c, Rs-232, Rs-485, Uart, CanDocumento6 páginasProtocolos I2c, Rs-232, Rs-485, Uart, CanAnonymous IoreTDh7100% (1)
- PuertoSeria VHDLDocumento3 páginasPuertoSeria VHDLLuis Gutiérrez MagánAún no hay calificaciones
- Practica de Unidad UartDocumento53 páginasPractica de Unidad UartLizzy GómezAún no hay calificaciones
- Previo8 VLSIDocumento3 páginasPrevio8 VLSIJosé André Rosario VázquezAún no hay calificaciones
- Interface RS485Documento24 páginasInterface RS485HectorLopezAún no hay calificaciones
- TEMA5Documento21 páginasTEMA5Pablo Limache PeñalozaAún no hay calificaciones
- Protocolo RS-232 y RS-485Documento5 páginasProtocolo RS-232 y RS-485Wilmer CasnanzuelaAún no hay calificaciones
- Comunicacion SerialDocumento6 páginasComunicacion SerialJuan Carlos100% (1)
- GPIBDocumento18 páginasGPIBArturo Hernandez DearteAún no hay calificaciones
- La Comunicación SerieDocumento41 páginasLa Comunicación SerieTocho VanegasAún no hay calificaciones
- A5.1 Reporte de Investigación SP JADSDocumento9 páginasA5.1 Reporte de Investigación SP JADSJose Alberto Delfin SosaAún no hay calificaciones
- Práctica 2 Microprocesadores Ii UsartDocumento6 páginasPráctica 2 Microprocesadores Ii UsartArturo72Aún no hay calificaciones
- Módulos Embebidos DSPDocumento16 páginasMódulos Embebidos DSPChristian AgAún no hay calificaciones
- Manual NovenoDocumento36 páginasManual NovenoJesus Iñaky Nava VelazquezAún no hay calificaciones
- Todo Sobre El PUERTO SERIE RS 232Documento24 páginasTodo Sobre El PUERTO SERIE RS 232tuco3Aún no hay calificaciones
- Comunicaciones PDFDocumento27 páginasComunicaciones PDFJuan Carlos Lizana FloresAún no hay calificaciones
- Tarjetas de Comunicacion OmronDocumento46 páginasTarjetas de Comunicacion OmronJar Za ArAún no hay calificaciones
- Reporte 9 JDAS 1842579Documento5 páginasReporte 9 JDAS 1842579Serna ReynaAún no hay calificaciones
- Reporte 9 PDFDocumento3 páginasReporte 9 PDFivan lopezAún no hay calificaciones
- UARTDocumento24 páginasUARTEduuard Fraa DedrickAún no hay calificaciones
- Estándar de Comunicaciones RS232 Con LabviewDocumento14 páginasEstándar de Comunicaciones RS232 Con LabviewMauro RaulAún no hay calificaciones
- P10 Comunicacion Serial RS232Documento7 páginasP10 Comunicacion Serial RS232Jheddy TorrezAún no hay calificaciones
- Comunicacion Inalambrica Entre PicDocumento7 páginasComunicacion Inalambrica Entre PicMatias FerrioliAún no hay calificaciones
- UF1874 - Mantenimiento de la infraestructura de la red de comunicacionesDe EverandUF1874 - Mantenimiento de la infraestructura de la red de comunicacionesAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Educación Financiera Tema 1Documento43 páginasEducación Financiera Tema 1Roger VelazquezAún no hay calificaciones
- Equipo-6-Trabajo de equpo-CONVERTIDORES-14 Abril 2020 PDFDocumento31 páginasEquipo-6-Trabajo de equpo-CONVERTIDORES-14 Abril 2020 PDFRoger VelazquezAún no hay calificaciones
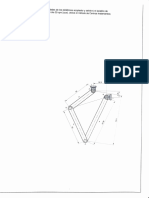
- Si El Eslabón 2 Tiene Una Velocidad de 10 Rad/s (CW) - Determine La Velocidad Del Eslabón 3 y Del PistónDocumento1 páginaSi El Eslabón 2 Tiene Una Velocidad de 10 Rad/s (CW) - Determine La Velocidad Del Eslabón 3 y Del PistónRoger VelazquezAún no hay calificaciones
- Ejercicio2 MecanismosDocumento3 páginasEjercicio2 MecanismosRoger VelazquezAún no hay calificaciones
- Gaamsa - Equipos - Urianalisis - U120-Ultra Acon Ficha TecnicaDocumento2 páginasGaamsa - Equipos - Urianalisis - U120-Ultra Acon Ficha TecnicaOmar UbarnesAún no hay calificaciones
- Ejercicios Propuestos Memorias Mapa Memorias PDFDocumento2 páginasEjercicios Propuestos Memorias Mapa Memorias PDFAntonio Andres Duffoo MarroquinAún no hay calificaciones
- TESIS EDUCACIÓN Polya P 120 PDFDocumento142 páginasTESIS EDUCACIÓN Polya P 120 PDFRolando Cuellar TelloAún no hay calificaciones
- Analitico - Gastos Exp TecnicoDocumento1 páginaAnalitico - Gastos Exp Tecnicopedro OrtizAún no hay calificaciones
- Sin Señal-DecodificadorDocumento1 páginaSin Señal-DecodificadorLizeth InfantesAún no hay calificaciones
- Digitalización de Las PymesDocumento11 páginasDigitalización de Las PymesJavier Z.Aún no hay calificaciones
- Encuestas PDFDocumento20 páginasEncuestas PDFCinthya ArguedasAún no hay calificaciones
- Protocolo República de CubaDocumento17 páginasProtocolo República de CubaIvan Velazquez AguileraAún no hay calificaciones
- M.D. Cableado EstructuradoDocumento9 páginasM.D. Cableado EstructuradoLuis Alberto Gutierrez MezaAún no hay calificaciones
- Ensayo Lectura ComprensivaDocumento22 páginasEnsayo Lectura ComprensivaErika CedeñoAún no hay calificaciones
- Especificaciones Tecnicas Agua y Desague SJBDocumento151 páginasEspecificaciones Tecnicas Agua y Desague SJBLuis EnriqueAún no hay calificaciones
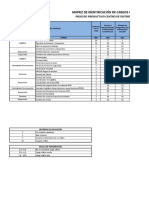
- Matriz de Identificación de Cargos CríticosDocumento3 páginasMatriz de Identificación de Cargos CríticosAlfonso Valdivia67% (3)
- Breve Reseña de La Evolución de La AdministraciónDocumento37 páginasBreve Reseña de La Evolución de La AdministracióncarloscahuayaAún no hay calificaciones
- Cisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialDocumento53 páginasCisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialAcceso RemotoAún no hay calificaciones
- Taller UnoDocumento15 páginasTaller Unojohn hernandezAún no hay calificaciones
- Juego Didactico de Los Componentes Del PCDocumento27 páginasJuego Didactico de Los Componentes Del PCMiguel Ortiz LozadaAún no hay calificaciones
- Pick Up Fiat Toro EspecificacionesDocumento3 páginasPick Up Fiat Toro EspecificacionesEduardo AyalaAún no hay calificaciones
- Definición de Necesidades e InsightsDocumento4 páginasDefinición de Necesidades e InsightsBryan CalderonAún no hay calificaciones
- Estructuras SMDocumento30 páginasEstructuras SMAndres DuAún no hay calificaciones
- Anteproyecto DEMADocumento54 páginasAnteproyecto DEMALuis Angel HopeAún no hay calificaciones
- Tipos de Operadores en Pseint - Portafolio ABA3Documento2 páginasTipos de Operadores en Pseint - Portafolio ABA3Mantenimiento JcasAún no hay calificaciones
- Galvanic Body SpaDocumento2 páginasGalvanic Body SpaSusana MaquedaAún no hay calificaciones
- Prospectiva EstratégicaDocumento5 páginasProspectiva EstratégicaDafne TorresAún no hay calificaciones
- Lectura - Modelamiento y Gestión de Bases de Datos PDFDocumento34 páginasLectura - Modelamiento y Gestión de Bases de Datos PDFloreto parraAún no hay calificaciones
- Programa Tentativo UICDocumento1 páginaPrograma Tentativo UICCadena 3Aún no hay calificaciones
- Plan de Auditoria InternaDocumento2 páginasPlan de Auditoria InternasergioAún no hay calificaciones
- Formato Plan de IzajeDocumento4 páginasFormato Plan de IzajePaulo Cesar100% (1)
- ACELEROGRAf ODocumento17 páginasACELEROGRAf ONatalie Sayago SilvaAún no hay calificaciones
- Pei Nazario RestrepoesperanzaDocumento176 páginasPei Nazario RestrepoesperanzaPastoral Preescolar San Luis - ManizalesAún no hay calificaciones
- Arbol Critico de La CalidadDocumento1 páginaArbol Critico de La CalidadAnahi TorranoAún no hay calificaciones