También podría gustarte
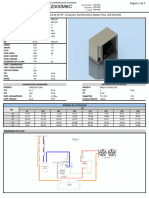
- MBBX2000M6CDocumento3 páginasMBBX2000M6CFelipe MartinezAún no hay calificaciones
- Clase 03 Capacidad de ReaccionDocumento27 páginasClase 03 Capacidad de ReaccionMilagros Roldan RodriguezAún no hay calificaciones
- Manejo Yóguico de Los KoshasDocumento7 páginasManejo Yóguico de Los Koshasmanuel rizAún no hay calificaciones
- Memorias Peritaje Básico Confitiendas RealDocumento32 páginasMemorias Peritaje Básico Confitiendas Realsatm36289Aún no hay calificaciones
- Cinemática Directa e Inversa de Robot SCARA en MATLABDocumento6 páginasCinemática Directa e Inversa de Robot SCARA en MATLABByron Pinguil Sánchez0% (2)
- Ficha Ciencia qUE SON LAS VACUNASDocumento4 páginasFicha Ciencia qUE SON LAS VACUNASAracely Flores GarmaAún no hay calificaciones
- Modelado ForenseDocumento28 páginasModelado ForenseGENESIS SERRANO CHILOAún no hay calificaciones
- Ficha Técnica All-New BMW 520d ExecutiveDocumento2 páginasFicha Técnica All-New BMW 520d ExecutiveMauricio Carvallo G.Aún no hay calificaciones
- Plan Lector Sexto de PrimariaDocumento9 páginasPlan Lector Sexto de PrimariaCarlos Rodas DesencamaronameloAún no hay calificaciones
- Línea de Tiempo Origen de La Supervisión EducativaDocumento1 páginaLínea de Tiempo Origen de La Supervisión EducativaWaliih100% (1)
- Prueba Reproduccion Humana SextoDocumento3 páginasPrueba Reproduccion Humana SextoClaudia SotoAún no hay calificaciones
- Bioetica y El Rol Psicologo PDFDocumento11 páginasBioetica y El Rol Psicologo PDFAndre SepúlvedaAún no hay calificaciones
- Cap 1. Seis - Propuestas - para - El - Proximo - Milenio - Italo - CalvinoDocumento21 páginasCap 1. Seis - Propuestas - para - El - Proximo - Milenio - Italo - CalvinoDianaAún no hay calificaciones
- Ejercicios Capitulo 7Documento21 páginasEjercicios Capitulo 7Rubn Rubn Lara86% (28)
- Los Medios de Transmicion Guiados ActividadDocumento10 páginasLos Medios de Transmicion Guiados ActividadFabricio PáezAún no hay calificaciones
- Tecnicas de Mejoramiento de La ProductividadDocumento2 páginasTecnicas de Mejoramiento de La ProductividadTonny Marr50% (2)
- Estudio Topografico FinalDocumento12 páginasEstudio Topografico FinalFreddy Gallo SanchezAún no hay calificaciones
- Ο ΔΙΚΑΙΟΠΟΛΙΣ βDocumento4 páginasΟ ΔΙΚΑΙΟΠΟΛΙΣ βEdwing OrtegaAún no hay calificaciones
- ESTIVILL (1) Eduard DuermeteDocumento73 páginasESTIVILL (1) Eduard DuermeteXimena LeonvendagarAún no hay calificaciones
- Caso Numero 3Documento8 páginasCaso Numero 3Sandra Zarate GonzalesAún no hay calificaciones
- Ensayo Primer Corte Socio Log I ADocumento7 páginasEnsayo Primer Corte Socio Log I Aalejandra sicardAún no hay calificaciones
- Portafolio de Productos ServiciosDocumento8 páginasPortafolio de Productos ServiciosLiliana Silva GarcesAún no hay calificaciones
- Ses-Juev-Pl-Leemos Sobre El Día Del Idioma NativoDocumento7 páginasSes-Juev-Pl-Leemos Sobre El Día Del Idioma NativogiulianaAún no hay calificaciones
- Sindrome Nefrótico y NefríticoDocumento43 páginasSindrome Nefrótico y NefríticoEmanuelMCAún no hay calificaciones
- Caso Práctico Hallazgos de Auditoria - 20.11Documento2 páginasCaso Práctico Hallazgos de Auditoria - 20.11yomunozmaAún no hay calificaciones
- DIAMANTINADocumento15 páginasDIAMANTINAJimpiero ArteagaAún no hay calificaciones
- Guia APTDocumento4 páginasGuia APTSergio GrigorowAún no hay calificaciones
- Armadura de DiosDocumento6 páginasArmadura de DiosMayumabel UlloaAún no hay calificaciones
- Act. 1magisterio de La Iglesia 3roDocumento3 páginasAct. 1magisterio de La Iglesia 3roTEYMI QUISPE. GAún no hay calificaciones
- Dialnet CompetenciasDeLosDocentesDeBiologiaEnLasUniversida 5655365 PDFDocumento17 páginasDialnet CompetenciasDeLosDocentesDeBiologiaEnLasUniversida 5655365 PDFViviana Zimmermann100% (1)