También podría gustarte
- Por Mi Favorito AbandonadoDocumento2191 páginasPor Mi Favorito AbandonadoNikol Guzmán100% (2)
- Actividad 1 Terminos Sobre Seguridad InformaticaDocumento5 páginasActividad 1 Terminos Sobre Seguridad InformaticaLucía González BaeloAún no hay calificaciones
- Informe AnualDocumento4 páginasInforme Anualkarina aguilar chaveAún no hay calificaciones
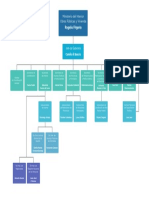
- Organigrama Ministerio Del Interior 1 - ARGENTINADocumento1 páginaOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozAún no hay calificaciones
- Escala SDocumento24 páginasEscala SSamantha Mallerly Villalta PomaAún no hay calificaciones
- Cracker Book by Vlad Acid Raven El PadrinoDocumento169 páginasCracker Book by Vlad Acid Raven El Padrinodsdsfgfdgfd100% (1)
- Hace Mucho TiempoDocumento2 páginasHace Mucho TiempoMaria Ignacia Van De Wyngard GillmoreAún no hay calificaciones
- Ogunda MafunDocumento3 páginasOgunda MafunbobdiazfrancoAún no hay calificaciones
- Sonido Escenico Excerpt 2paginasDocumento9 páginasSonido Escenico Excerpt 2paginasMayra SanchezAún no hay calificaciones
- El Contrato de TrabajoDocumento13 páginasEl Contrato de Trabajoalejandro lopezAún no hay calificaciones
- Elastic I DadDocumento30 páginasElastic I DadJEFFERSON DAITON GOMEZ SHUPINGAHUAAún no hay calificaciones
- Sociales Taller 10 PDFDocumento2 páginasSociales Taller 10 PDFAndrea Giraldo HerreraAún no hay calificaciones
- ¿Qué Es Un PiensoDocumento5 páginas¿Qué Es Un Piensotefa sgAún no hay calificaciones
- Tarea GRHDocumento2 páginasTarea GRHAdrian Tello OrellanaAún no hay calificaciones
- Tarea 6.1 - Cuadro Comparativo Entre El Período Barroco, Clásico, Romántico y Contemporaneo, Esteban Tabora Castro - #21411330.Documento15 páginasTarea 6.1 - Cuadro Comparativo Entre El Período Barroco, Clásico, Romántico y Contemporaneo, Esteban Tabora Castro - #21411330.Marshall LoackwoodAún no hay calificaciones
- (Diseño Organizacional) PC1 2023 YSIQUE PC1Documento2 páginas(Diseño Organizacional) PC1 2023 YSIQUE PC1Marcelo CamargoAún no hay calificaciones
- Informe 3 Lopez. OlivaresDocumento18 páginasInforme 3 Lopez. OlivaresLopez ReyesAún no hay calificaciones
- Apr-22 20100033251 Copymax E.I.R.L: Formato 8.1: Registro de ComprasDocumento10 páginasApr-22 20100033251 Copymax E.I.R.L: Formato 8.1: Registro de ComprasJesus Miguel AguilarAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Paso 3 - Seleccionar Bibliografía Lingüística de La Lengua Escogida para Un Estado Del ArteDocumento9 páginasGuia de Actividades y Rúbrica de Evaluación - Paso 3 - Seleccionar Bibliografía Lingüística de La Lengua Escogida para Un Estado Del ArteisabelAún no hay calificaciones
- CLASE 4. - Formulación de IdeasDocumento28 páginasCLASE 4. - Formulación de IdeasMiguel PoloAún no hay calificaciones
- Silabo Biofisica EstomatologicaDocumento6 páginasSilabo Biofisica EstomatologicaJuan Augusto Fernández TarazonaAún no hay calificaciones
- Pot CoatepequeDocumento92 páginasPot CoatepequeEdgar Urrutia100% (1)
- Análisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021Documento25 páginasAnálisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021ADRIANA YNÉS FERNANDEZ CHAVEZAún no hay calificaciones
- Muros Con ContrafuerteDocumento37 páginasMuros Con ContrafuerteGREISON ENRRIQUE CANDIA MOYAAún no hay calificaciones
- Componentes Del CementoDocumento6 páginasComponentes Del CementoPaola LliguicotaAún no hay calificaciones
- CORAZÓNDocumento149 páginasCORAZÓNJLuisCorderoCAún no hay calificaciones
- Proyecto PreescolarDocumento9 páginasProyecto Preescolaryinet plazasAún no hay calificaciones
- Pauta Alimentaria PauliDocumento3 páginasPauta Alimentaria PauliPaulina Muñoz CastilloAún no hay calificaciones
- Actividad 2 2°m Física MovimientoDocumento3 páginasActividad 2 2°m Física MovimientoFernanda MontoyaAún no hay calificaciones
- Sencamer Textil y CalzadoDocumento2 páginasSencamer Textil y Calzadokike roca100% (1)