También podría gustarte
- Actividad 4 Ensayo ÉticaDocumento8 páginasActividad 4 Ensayo ÉticaAndrea Carolina PEREZ SAMUDIO100% (1)
- Paso5 - Construccion - 203036 - 21 - Jairo VelasquezDocumento20 páginasPaso5 - Construccion - 203036 - 21 - Jairo Velasquezjohn bernal100% (2)
- Taller Rentas Persona NaturalDocumento17 páginasTaller Rentas Persona NaturalAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- Cuestionario Administracion FinancieraDocumento4 páginasCuestionario Administracion FinancieraAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- Prototipado de La Idea de NegocioDocumento1 páginaPrototipado de La Idea de NegocioAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- Ensayo Sobre La Presentacion de Los Estados Financieros Colgap VS NiifDocumento7 páginasEnsayo Sobre La Presentacion de Los Estados Financieros Colgap VS NiifAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- AppleDocumento6 páginasAppleAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- SINTESIS Contabilidad GubernamentalDocumento3 páginasSINTESIS Contabilidad GubernamentalAndrea Carolina PEREZ SAMUDIO100% (1)
- CUESTIONARIODocumento7 páginasCUESTIONARIOAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- TALLER DE ESTADOS FINANCIEROS 5toDocumento9 páginasTALLER DE ESTADOS FINANCIEROS 5toAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- Actividad No 2 Contabilidad GubernamentalDocumento3 páginasActividad No 2 Contabilidad GubernamentalAndrea Carolina PEREZ SAMUDIOAún no hay calificaciones
- Cree Su Catálogo Online Con JoomagDocumento4 páginasCree Su Catálogo Online Con JoomagAlejandro MartínezAún no hay calificaciones
- La Globalizacion, La Mundializacion y Su Impacto en La Economia de La EducacionDocumento17 páginasLa Globalizacion, La Mundializacion y Su Impacto en La Economia de La EducacionmarinAún no hay calificaciones
- Circuitos Rectificadores Con DiodosDocumento25 páginasCircuitos Rectificadores Con DiodosMarco MurilloAún no hay calificaciones
- Laboratorio de Microcontroladores Laboratorio N°14 "PWM"Documento11 páginasLaboratorio de Microcontroladores Laboratorio N°14 "PWM"Willy Arnold Valencia CamayoAún no hay calificaciones
- Fallas en Pavimentos Flexibles - 01Documento27 páginasFallas en Pavimentos Flexibles - 01Joel Ht LuchAún no hay calificaciones
- Actividad #1. Cuestionario Retie Cipa 8Documento10 páginasActividad #1. Cuestionario Retie Cipa 8DARIO AVILA RINCONAún no hay calificaciones
- CIUDADANIADocumento53 páginasCIUDADANIALiz Magaly Diaz RengifoAún no hay calificaciones
- Curso WatercadDocumento230 páginasCurso WatercadPaolaFMAún no hay calificaciones
- GA1 - F1-AP1-GA03 MONTAR INSTAL ELECTRI2022-Ajustada 3 NovDocumento44 páginasGA1 - F1-AP1-GA03 MONTAR INSTAL ELECTRI2022-Ajustada 3 NovDayana AmuAún no hay calificaciones
- Diseño Curricular Carla Cascos ImañaDocumento29 páginasDiseño Curricular Carla Cascos ImañaCarlita CascosAún no hay calificaciones
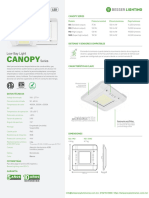
- Ficha Tecnica Canopy LEDDocumento2 páginasFicha Tecnica Canopy LEDjennifer24cvAún no hay calificaciones
- Brochure EATONDocumento8 páginasBrochure EATONJohan Mateo Cantor TorresAún no hay calificaciones
- Comercio InternacionalDocumento29 páginasComercio Internacionalcompra feliz100% (1)
- Proyecto Rsvii y Viii Educacion 2023 Grupo 9Documento20 páginasProyecto Rsvii y Viii Educacion 2023 Grupo 9AlejandraAún no hay calificaciones
- Informe Final Consultoria Tecnico CientificaDocumento20 páginasInforme Final Consultoria Tecnico Cientificakary galvisAún no hay calificaciones
- Ecommerce Caso Practico Unidad 3Documento7 páginasEcommerce Caso Practico Unidad 3Nos ArtAún no hay calificaciones
- Triada Clásica de La EducaciónDocumento3 páginasTriada Clásica de La EducaciónJesús TrejoAún no hay calificaciones
- Planificador Semanal Aprendo en Casa - Lar-S9 - 01-06Documento3 páginasPlanificador Semanal Aprendo en Casa - Lar-S9 - 01-06MARTHA RUTH SILVA CANOAún no hay calificaciones
- Paginas para Descargar Libros GratisDocumento2 páginasPaginas para Descargar Libros GratispascoelunicoAún no hay calificaciones
- Linea de Tiempo Del Origen e Historia de La ProgramacionDocumento1 páginaLinea de Tiempo Del Origen e Historia de La Programacionernestjvs2002Aún no hay calificaciones
- 8) Ensamblaje de Un PC 10-2 SenaDocumento33 páginas8) Ensamblaje de Un PC 10-2 SenaJustin gonzalezAún no hay calificaciones
- Data MineDocumento23 páginasData MineNathali Sara Espiritu VillarAún no hay calificaciones
- Arredondo 2021 TGDocumento99 páginasArredondo 2021 TGNicol HerreraAún no hay calificaciones
- DSC GS3055-IG (W) Product Overview r003 ComDocumento16 páginasDSC GS3055-IG (W) Product Overview r003 ComHector MaldithoAún no hay calificaciones
- Alexander MorenoDocumento10 páginasAlexander MorenoAlexander MorenoAún no hay calificaciones
- Diapositiva Roland EstelaDocumento27 páginasDiapositiva Roland EstelaNoel LinoAún no hay calificaciones
- Cambio EnfriadorDocumento2 páginasCambio EnfriadorDiego Gonzalez BuendiaAún no hay calificaciones
- Perros - Fichas de Animales en National GeographicDocumento18 páginasPerros - Fichas de Animales en National GeographicMateriales la luz C.A.Aún no hay calificaciones
- Manual de Programacion HP50GDocumento179 páginasManual de Programacion HP50Gbylucas100% (3)