También podría gustarte
- Desmontaje y montaje de elementos de aluminio. TMVL0309De EverandDesmontaje y montaje de elementos de aluminio. TMVL0309Aún no hay calificaciones
- Mando de Dos EstacionesDocumento7 páginasMando de Dos EstacionesDavis CordovaAún no hay calificaciones
- Caracteristicas Tecnicas de Celdas y TransformadorDocumento9 páginasCaracteristicas Tecnicas de Celdas y Transformadorerika_bco2520Aún no hay calificaciones
- Cartel D Contenidos Fe AlegriaDocumento2 páginasCartel D Contenidos Fe Alegriasegundo bernilla rufastoAún no hay calificaciones
- 33espiga Punta de Poste 2019Documento3 páginas33espiga Punta de Poste 2019René Luis Perez MagneAún no hay calificaciones
- Taller 6.1 RansformadoresDocumento46 páginasTaller 6.1 RansformadoresSantiago Arroyave CañaveralAún no hay calificaciones
- Informe Aguas DanzantesDocumento20 páginasInforme Aguas DanzantesAlan Ricardo Serrano Pucheta100% (1)
- PROMELSA Catalogo Transformador 3ØDocumento4 páginasPROMELSA Catalogo Transformador 3ØjulianAún no hay calificaciones
- Manual M1 Instalación de Motores Eléctricos y Equipos de CalefacciónDocumento50 páginasManual M1 Instalación de Motores Eléctricos y Equipos de CalefacciónpercyAún no hay calificaciones
- Conductores Red PrimariaDocumento6 páginasConductores Red PrimariaEdgarParedesCAún no hay calificaciones
- Selección Del Cable para Filtros de Armónicos y Bancos de CondensadoresDocumento7 páginasSelección Del Cable para Filtros de Armónicos y Bancos de CondensadoresPatricio ReyesAún no hay calificaciones
- Material Normalizado EDCDocumento23 páginasMaterial Normalizado EDCmariojrm74Aún no hay calificaciones
- Compact NS - 630 A - 33482Documento3 páginasCompact NS - 630 A - 33482espalAún no hay calificaciones
- Conductores ElectricosDocumento19 páginasConductores ElectricosHUGO DE JESUS SOLORZANO MORENOAún no hay calificaciones
- CálculosDocumento10 páginasCálculosErickFranciscoLopezHernandezAún no hay calificaciones
- Motores EléctricosDocumento164 páginasMotores EléctricosSeprope EppAún no hay calificaciones
- OptoacopladorDocumento13 páginasOptoacopladorLeonardo RomoAún no hay calificaciones
- Grupos de Conexion de Transformadores - 2011Documento39 páginasGrupos de Conexion de Transformadores - 2011Megan AyalaAún no hay calificaciones
- Tabla de Seleccion para InterruptoresDocumento4 páginasTabla de Seleccion para InterruptoresNUOVO STILEAún no hay calificaciones
- Cap12 Redes Distribucion Secundaria AereaDocumento30 páginasCap12 Redes Distribucion Secundaria AereaJavier Eduardo Vargas MorenoAún no hay calificaciones
- Elaboración Anteproyecto de Subestaciones Eléctricas de PotenciaDocumento23 páginasElaboración Anteproyecto de Subestaciones Eléctricas de PotenciaPablo Fernandez100% (1)
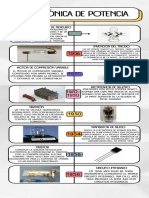
- Línea Del Tiempo Electronica de PotenciaDocumento2 páginasLínea Del Tiempo Electronica de PotenciaArhat RamosAún no hay calificaciones
- S5 - Componentes y Equipos EléctricosDocumento35 páginasS5 - Componentes y Equipos EléctricosRoberth Casas TorrealbaAún no hay calificaciones
- ANEXO 2 Tablero ElectricoDocumento11 páginasANEXO 2 Tablero Electricomarco antonio pachecoAún no hay calificaciones
- A.capítulo 1 - Terminología - Protección de Sistemas Electricos - TeoríaDocumento12 páginasA.capítulo 1 - Terminología - Protección de Sistemas Electricos - TeoríaRodrigo PaezAún no hay calificaciones
- Laboratorio de Rotativas 1Documento9 páginasLaboratorio de Rotativas 1Jaime Franksue Sullon LiAún no hay calificaciones
- F T Inversor Autonomo Isoverter 1500 EspDocumento2 páginasF T Inversor Autonomo Isoverter 1500 EspJosé Antonio De Dios RodríguezAún no hay calificaciones
- Empalmes de de Cables y Alambres ElectricosDocumento12 páginasEmpalmes de de Cables y Alambres ElectricosWilfredo Ballena MorilloAún no hay calificaciones
- Word Teoria de BombasDocumento22 páginasWord Teoria de BombasMiguel Mamani CastroAún no hay calificaciones
- Silabo Dispositivos ElectronicosDocumento4 páginasSilabo Dispositivos ElectronicosJohan Silva CuevaAún no hay calificaciones
- Conductores para Instalaciones EléctricasDocumento7 páginasConductores para Instalaciones EléctricasJonathan FuentesAún no hay calificaciones
- Interruptores de Transferencia AutomáticaDocumento6 páginasInterruptores de Transferencia AutomáticaYonhelis ParejoAún no hay calificaciones
- PDF Mantenimiento de Amoladora CompressDocumento11 páginasPDF Mantenimiento de Amoladora CompressluisAún no hay calificaciones
- Guia Conexionado de Motores Trifasicos 6 PuntasDocumento5 páginasGuia Conexionado de Motores Trifasicos 6 PuntasGiraldo IvanAún no hay calificaciones
- Equipos de Protec Reconectador Seccionador Cite - CompressedDocumento46 páginasEquipos de Protec Reconectador Seccionador Cite - Compressedesanes439Aún no hay calificaciones
- Ficha Técnica Linea Euro-Vitral AWA Puerta Plegable-5Documento1 páginaFicha Técnica Linea Euro-Vitral AWA Puerta Plegable-5isabellaAún no hay calificaciones
- Trihal Espa+ OlDocumento16 páginasTrihal Espa+ OlDenis Alexander Chavez PerezAún no hay calificaciones
- Calculo de IlumDocumento77 páginasCalculo de IlumJACK LUIS CCANQQUERI MEDINAAún no hay calificaciones
- LAB 1.2 Maquinas ElectricasDocumento13 páginasLAB 1.2 Maquinas ElectricasCristopher RodriguezAún no hay calificaciones
- Bobinado Del Motor TrifasicoDocumento7 páginasBobinado Del Motor TrifasicoJadner Gerardo Meléndez AristaAún no hay calificaciones
- Exposición Equipos y Materiales Eléctricos 1.9Documento37 páginasExposición Equipos y Materiales Eléctricos 1.9Omaarrc Cart Rechargeed100% (1)
- Órganos de ObturaciónDocumento6 páginasÓrganos de ObturaciónLuis Gabriel Mosquera BriceñoAún no hay calificaciones
- 2da Unidad Tensiones Normalizadas2018Documento43 páginas2da Unidad Tensiones Normalizadas2018JulioCesarJulceOrtiz100% (1)
- Brochure - Riesgo ElectricoDocumento2 páginasBrochure - Riesgo ElectricoSEGURIDAD COPEMANEAún no hay calificaciones
- Especificaciones Conduit CorrugadoDocumento1 páginaEspecificaciones Conduit Corrugadoapi-371418575Aún no hay calificaciones
- Tableros Eléctricos Parte 2Documento71 páginasTableros Eléctricos Parte 2Merly Medina GutierrezAún no hay calificaciones
- Ficha Tecnica de Banco de Cargas de 40KW 3F de 8 PasosDocumento2 páginasFicha Tecnica de Banco de Cargas de 40KW 3F de 8 PasosEduardo Puma AriasAún no hay calificaciones
- Taller de Instrumentacion IndustrialDocumento10 páginasTaller de Instrumentacion Industrialcarlos hernandezAún no hay calificaciones
- Bancos de Capacitores FijosDocumento5 páginasBancos de Capacitores FijosEmanuel Lopez GoytiaAún no hay calificaciones
- TecsupDocumento6 páginasTecsupJulio Tomas Trujillo CastroAún no hay calificaciones
- 3122 Im S L (Kyoritsu)Documento2 páginas3122 Im S L (Kyoritsu)George Benny Miranda ArrunateguiAún no hay calificaciones
- Informe Oficial de Rebobinado de Motor Trifasico de Maquinas IIIDocumento16 páginasInforme Oficial de Rebobinado de Motor Trifasico de Maquinas IIIJhonny Perez100% (1)
- 02malla Fin ServicioDocumento3 páginas02malla Fin ServicioMario Rolando Moreno TapiaAún no hay calificaciones
- Transformadores de Alta TensionDocumento6 páginasTransformadores de Alta TensionIrisAún no hay calificaciones
- Interruptor AbbDocumento120 páginasInterruptor Abbdielcord90Aún no hay calificaciones
- Casco 2Documento9 páginasCasco 2Junior JosesitoAún no hay calificaciones
- 2) Conductores Eléctricos PDFDocumento17 páginas2) Conductores Eléctricos PDFGustavoFernandezCardoneAún no hay calificaciones
- Empalmes Tipo ResorteDocumento8 páginasEmpalmes Tipo ResorteAndres Mauricio AcostaAún no hay calificaciones
- Electricidad Tecnico Semana UnoDocumento18 páginasElectricidad Tecnico Semana UnoEduar CantorAún no hay calificaciones
- Arrend. Arquimedes VeraDocumento2 páginasArrend. Arquimedes VeraDario Javier Tubon TiteAún no hay calificaciones
- Carmen LeonDocumento2 páginasCarmen LeonDario Javier Tubon TiteAún no hay calificaciones
- Alegatos en Juicio EjecutivoDocumento4 páginasAlegatos en Juicio EjecutivoDario Javier Tubon TiteAún no hay calificaciones
- Abandono de Trabajo EcuadorDocumento1 páginaAbandono de Trabajo EcuadorDario Javier Tubon TiteAún no hay calificaciones
- Contrato de Trabajo-NogeraDocumento1 páginaContrato de Trabajo-NogeraDario Javier Tubon Tite100% (1)
- ESPECIFICACIONES TECNICAS Inst. Elec. ParqueDocumento14 páginasESPECIFICACIONES TECNICAS Inst. Elec. ParquemoisesAún no hay calificaciones
- Ui La Tecnología Como Recurso EstratégicoDocumento17 páginasUi La Tecnología Como Recurso EstratégicoFrancisca Anahi Rodriguez Garcia100% (1)
- Electrodos Utilizados en El Proceso GMAWDocumento8 páginasElectrodos Utilizados en El Proceso GMAWFAUSTO CARDENAS100% (1)
- Breve Historia de La Construccion Del Corredor Verde de GuardamarDocumento36 páginasBreve Historia de La Construccion Del Corredor Verde de GuardamarBelen GuevaraAún no hay calificaciones
- Ficha Cercas Pro PerimetralDocumento2 páginasFicha Cercas Pro PerimetralClaudio SelleupAún no hay calificaciones
- Revista Ciencias Técnicas AgropecuariasDocumento82 páginasRevista Ciencias Técnicas AgropecuariasPedro HuaccotoAún no hay calificaciones
- 4 Informe SolidificacionDocumento19 páginas4 Informe SolidificacionleandroAún no hay calificaciones
- Unidad IV Almacenamiento de Hcb.Documento30 páginasUnidad IV Almacenamiento de Hcb.German YaibonaAún no hay calificaciones
- Catalogo Completo 2016Documento1546 páginasCatalogo Completo 2016cesar vazquezAún no hay calificaciones
- Extracción LíquidoDocumento53 páginasExtracción LíquidoJefferson Andres Gonzales MontealegreAún no hay calificaciones
- Cuaderno 5 Ventanas de MaderaDocumento34 páginasCuaderno 5 Ventanas de MaderaSebaMastropieroAún no hay calificaciones
- Estudio de Teoría de ColasDocumento41 páginasEstudio de Teoría de ColasGavino LoyagaAún no hay calificaciones
- Historia de La Carrocería Del AutomóvilDocumento14 páginasHistoria de La Carrocería Del Automóvilaicvigo197392% (12)
- PavonadoDocumento10 páginasPavonadojose_salazar1982100% (1)
- Diseño y Construccion de Un NanosateliteDocumento22 páginasDiseño y Construccion de Un NanosateliteEmanuel Acosta Gutierrez100% (1)
- Ensayo Proctor Estándar y Proctor ModificadoDocumento41 páginasEnsayo Proctor Estándar y Proctor Modificadoleonardo lainez zavala100% (2)
- AVES SUS GRUPOS FUNCIONALES Y SERVICIOS ECOSISTEMICOS en Colombia-Pacheco & Laura-2013 PDFDocumento47 páginasAVES SUS GRUPOS FUNCIONALES Y SERVICIOS ECOSISTEMICOS en Colombia-Pacheco & Laura-2013 PDFbioalfAún no hay calificaciones
- Parafraseo Lineas de Transmision 2018 - IIDocumento9 páginasParafraseo Lineas de Transmision 2018 - IICristian Chata ClarosAún no hay calificaciones
- Proyecto EncubadoraDocumento10 páginasProyecto Encubadoraalekos37Aún no hay calificaciones
- Cálculo Mec. de Cables Línea Aérea 33kV y 13,2kVDocumento12 páginasCálculo Mec. de Cables Línea Aérea 33kV y 13,2kVAnonymous cOYX3GRdRBAún no hay calificaciones
- Espesor de ChapasDocumento1 páginaEspesor de ChapasRaúl MayaAún no hay calificaciones
- Metalurgia Fisica 1-1Documento2 páginasMetalurgia Fisica 1-1Andre Angel Arapa Mendoza59% (17)
- ALUMBREDocumento1 páginaALUMBRECesar EchavarriaAún no hay calificaciones
- Guía El Crecimiento de La Población Humana y Su Efecto en El EcosistemaDocumento16 páginasGuía El Crecimiento de La Población Humana y Su Efecto en El EcosistemaRobertoAnibalSaezLisboa0% (1)
- Estudio Arquelogico, Nueva Catarina, Jacaltenango, Huehuetenango, Yich K'u' WatanhDocumento23 páginasEstudio Arquelogico, Nueva Catarina, Jacaltenango, Huehuetenango, Yich K'u' WatanhJuan MontejoAún no hay calificaciones
- Color Cielab PDFDocumento112 páginasColor Cielab PDFLuisAlpalaAún no hay calificaciones
- 44 Equipos de LevanteDocumento19 páginas44 Equipos de LevanteRoberto Salas100% (1)
- Manuale E-20 N (ES)Documento26 páginasManuale E-20 N (ES)mario2203Aún no hay calificaciones
- Instalaciones 2 TareaDocumento16 páginasInstalaciones 2 TareaedwinAún no hay calificaciones