También podría gustarte
- Como Hackear SatelitesDocumento30 páginasComo Hackear Satelitesarkantosfree100% (1)
- Cálculo Diferencial e IntegralDocumento188 páginasCálculo Diferencial e IntegralKevin100% (1)
- Ejercicios Del Libro CDocumento45 páginasEjercicios Del Libro CKevinAún no hay calificaciones
- Resumen Manual Del Conductor CR 2019 PDFDocumento19 páginasResumen Manual Del Conductor CR 2019 PDFKevin100% (1)
- Apuntes Resonancia Quimica OrganicaDocumento23 páginasApuntes Resonancia Quimica OrganicaDomiJojotAún no hay calificaciones
- Curso de Manejo de Explosivos 1Documento31 páginasCurso de Manejo de Explosivos 1kevin luis100% (1)
- Proyecto de Sistema AlternativoDocumento6 páginasProyecto de Sistema Alternativogargola009Aún no hay calificaciones
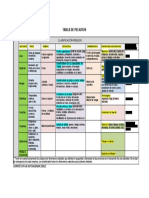
- Tabla de Peligros GTC 45 V 2012Documento1 páginaTabla de Peligros GTC 45 V 2012Nataliia Carvajal CastroAún no hay calificaciones
- CURIOSITYDocumento4 páginasCURIOSITYMAX CALDERÓN ZEVALLOSAún no hay calificaciones
- Movimiento Rectilíneo Uniforme ConsultaDocumento3 páginasMovimiento Rectilíneo Uniforme ConsultaLiu kaxxXAún no hay calificaciones
- Grados de LibertadDocumento3 páginasGrados de LibertadChristian SantosAún no hay calificaciones
- Movimiento Rectilíneo UniformeDocumento4 páginasMovimiento Rectilíneo UniformeasadasdAún no hay calificaciones
- Relacion de Problemas 2012Documento17 páginasRelacion de Problemas 2012samuporroAún no hay calificaciones
- Satelites Varios 13-2Documento41 páginasSatelites Varios 13-2Viviana RinconAún no hay calificaciones
- La Ley de Hubble Y La Expansión Del UniversoDocumento5 páginasLa Ley de Hubble Y La Expansión Del UniversoKarla RamirezAún no hay calificaciones
- Relatividad GuiaDocumento2 páginasRelatividad GuiaStefanyAún no hay calificaciones
- Actividad 1. Monitoreando Al PopocatépetlDocumento2 páginasActividad 1. Monitoreando Al Popocatépetljose guadalupeAún no hay calificaciones
- Semana - 13a-Trilateracion Geodesica GpsDocumento73 páginasSemana - 13a-Trilateracion Geodesica Gpspierina tuanama100% (1)
- Actividad Órbitas PlanetariasDocumento8 páginasActividad Órbitas Planetariasvaleria elenesAún no hay calificaciones
- Teledeteccion Clase1Documento29 páginasTeledeteccion Clase1Wayra SonqoyAún no hay calificaciones
- Introducción Al GPSDocumento15 páginasIntroducción Al GPSEmërsòn Mottä100% (1)
- Explo. ModernaDocumento8 páginasExplo. ModernaMiguel SalcedoAún no hay calificaciones
- 1 - Introduccion Sensores RemotosDocumento32 páginas1 - Introduccion Sensores RemotosSejas Catalan ElmerAún no hay calificaciones
- CuriosityDocumento15 páginasCuriositySergio HernandezAún no hay calificaciones
- Cta 5to SecDocumento11 páginasCta 5to SecJAIMEADRIANO100% (1)
- Caminata LunarDocumento9 páginasCaminata LunarchriAún no hay calificaciones
- Introducción Al GPSDocumento4 páginasIntroducción Al GPSOscar Fabian OrregoAún no hay calificaciones
- RadarDocumento29 páginasRadarvicedo2013Aún no hay calificaciones
- Ejercicios 2P 1S2022Documento2 páginasEjercicios 2P 1S2022KENNETH DAVID SANCHEZ GARCIAAún no hay calificaciones
- CompasDocumento8 páginasCompasDayana ArisacaAún no hay calificaciones
- GPSDocumento15 páginasGPSAlben BolañosAún no hay calificaciones
- Glonassss CorregidoDocumento35 páginasGlonassss CorregidoContreras Ortega JosuéAún no hay calificaciones
- Guia Exploracion V6Documento38 páginasGuia Exploracion V6Trakka AlkaudonAún no hay calificaciones
- MemoriaDocumento16 páginasMemoriaMaria Arrojo NaveiraAún no hay calificaciones
- Curso Basico Gps 1Documento0 páginasCurso Basico Gps 1Joe Urbina BaigorriaAún no hay calificaciones
- Veh - Esp Tema2-CDocumento55 páginasVeh - Esp Tema2-CJOrgeAún no hay calificaciones
- Introduccion A Los GpsDocumento42 páginasIntroduccion A Los GpsIzack LopezAún no hay calificaciones
- Satelites AmbientalesDocumento42 páginasSatelites AmbientalesDubban AtseutaAún no hay calificaciones
- PresentacionDocumento8 páginasPresentacionEsteban_A_ZAún no hay calificaciones
- Expo3 SensoresDocumento36 páginasExpo3 SensoresJose Enrique Gonzalez SalinasAún no hay calificaciones
- Curso Gps NavegadorDocumento36 páginasCurso Gps NavegadorCastillo VigilAún no hay calificaciones
- Durkin's ModelDocumento14 páginasDurkin's ModelGabo VizueteAún no hay calificaciones
- Prospeccion Por Imágenes SatelitesDocumento4 páginasProspeccion Por Imágenes SatelitesRaulSalazarAún no hay calificaciones
- Ejercicios Fisica RelativaDocumento2 páginasEjercicios Fisica RelativawilsonAún no hay calificaciones
- 22FV TP1Documento10 páginas22FV TP1Daniel DdiazAún no hay calificaciones
- Ray Tracing Photon MappingDocumento14 páginasRay Tracing Photon MappingTatiana Roberto TorresAún no hay calificaciones
- 9-Radar TropográficoDocumento27 páginas9-Radar Tropográficokevin mendozaAún no hay calificaciones
- Ej Unidad 4Documento2 páginasEj Unidad 4Marcos Caínzos RodríguezAún no hay calificaciones
- Autonomous NavigationDocumento2 páginasAutonomous NavigationGabriel RoldánAún no hay calificaciones
- EL RADAR y CINEMATICA PDFDocumento12 páginasEL RADAR y CINEMATICA PDFMaikel RamosAún no hay calificaciones
- Oceanografia GeologicaDocumento69 páginasOceanografia GeologicaN.R SquireAún no hay calificaciones
- Deber 8 Movimiento CircularDocumento5 páginasDeber 8 Movimiento CircularAngie BustillosAún no hay calificaciones
- Guia Practica7 1 18Documento11 páginasGuia Practica7 1 18Marcelo Ovando67% (3)
- Introduccion A La Fotogrametria SatelitalDocumento15 páginasIntroduccion A La Fotogrametria SatelitalRicardo De La CruzAún no hay calificaciones
- Presentacion Taller Ing. Francisco Mora PDFDocumento75 páginasPresentacion Taller Ing. Francisco Mora PDFFernando SoteloAún no hay calificaciones
- Discurso MayeDocumento4 páginasDiscurso MayeMayerli NiñoAún no hay calificaciones
- Imágenes SatelitalesDocumento23 páginasImágenes SatelitalesGabriela Florez LenguaAún no hay calificaciones
- 2.2 Sistemas Espaciales de TeledetecciónDocumento22 páginas2.2 Sistemas Espaciales de TeledetecciónCristhoper CusmeAún no hay calificaciones
- Perseverance Rover V1.2Documento8 páginasPerseverance Rover V1.2Jorge A Martinez BAún no hay calificaciones
- 02 CEPP1 20 09 2023 Ejers AdDocumento22 páginas02 CEPP1 20 09 2023 Ejers Addavidgcabrera.slAún no hay calificaciones
- 3 InformeDocumento34 páginas3 InformeDiana Supo OsorioAún no hay calificaciones
- Gps TST para Sacar Su Rumbo y BuzamientoDocumento28 páginasGps TST para Sacar Su Rumbo y BuzamientoCristhian Coila DiazAún no hay calificaciones
- Ficha de Trabajo Cantidad QuímicaDocumento42 páginasFicha de Trabajo Cantidad QuímicaCristina BenayAún no hay calificaciones
- Satelites Radiometria Landsat2Documento37 páginasSatelites Radiometria Landsat2AlexanderAún no hay calificaciones
- Imágenes multiespectrales: Liberando el espectro: avances en visión por computadoraDe EverandImágenes multiespectrales: Liberando el espectro: avances en visión por computadoraAún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Gráficos por computadora de radiosidad: Avances en la visualización a través de la radiosidad en la visión por computadoraDe EverandGráficos por computadora de radiosidad: Avances en la visualización a través de la radiosidad en la visión por computadoraAún no hay calificaciones
- Razones y Funciones TrigonométricasDocumento112 páginasRazones y Funciones TrigonométricasKevin100% (1)
- Plantilla InfografiaDocumento1 páginaPlantilla InfografiaKevinAún no hay calificaciones
- Expresiones AlgebraicasDocumento97 páginasExpresiones AlgebraicasKevinAún no hay calificaciones
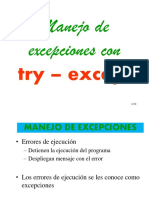
- Manejo de Excepciones Try - Except PythonDocumento12 páginasManejo de Excepciones Try - Except PythonKevinAún no hay calificaciones
- FICHA TECNICA GP - R120 ELEV. RPT. (2,000 X 2,200) PDFDocumento1 páginaFICHA TECNICA GP - R120 ELEV. RPT. (2,000 X 2,200) PDFafernandez3106Aún no hay calificaciones
- El Experimento de Michelson MorleyDocumento6 páginasEl Experimento de Michelson MorleyJALSAún no hay calificaciones
- Metodología MPACDocumento5 páginasMetodología MPACmariaAún no hay calificaciones
- T P #9 Enzimas PécticasDocumento8 páginasT P #9 Enzimas Pécticaspablo_faccendiniAún no hay calificaciones
- INFORME de PerforacionDocumento14 páginasINFORME de PerforacionLS ChoqueneiraAún no hay calificaciones
- Ejemplo de Valoración PsicológicaDocumento5 páginasEjemplo de Valoración PsicológicaRafael PomboAún no hay calificaciones
- CONCLUSIONES Informe Parametros Quimicos Del Agua I.Documento1 páginaCONCLUSIONES Informe Parametros Quimicos Del Agua I.Mauricio JarabaAún no hay calificaciones
- Reporte 2 Fisica 1Documento6 páginasReporte 2 Fisica 1Ana Lucía VillatoroAún no hay calificaciones
- Calculo 2 ConsultaDocumento6 páginasCalculo 2 ConsultaMichael MorenoAún no hay calificaciones
- 04 - Lineas de Corriente Trayectoria Traza, RotacionDocumento1 página04 - Lineas de Corriente Trayectoria Traza, RotacionManuel RiveraAún no hay calificaciones
- skf01 MaproDocumento146 páginasskf01 MaproHugo PinargoteAún no hay calificaciones
- Valor en Riesgo-Resumen-Alexander PDFDocumento125 páginasValor en Riesgo-Resumen-Alexander PDFJhon Diego Vargas OliveiraAún no hay calificaciones
- MonografiaDocumento23 páginasMonografiafrankssereAún no hay calificaciones
- Análisis de Vivienda Bioclimática - FinalDocumento39 páginasAnálisis de Vivienda Bioclimática - FinalAdder Alferez QuispeAún no hay calificaciones
- Unidad 6 Julio Garavito Armero - Adrián Avendaño LondoñoDocumento9 páginasUnidad 6 Julio Garavito Armero - Adrián Avendaño LondoñoDiego A. Bernal B.Aún no hay calificaciones
- Origen Del Termino Numero ImaginarioDocumento10 páginasOrigen Del Termino Numero ImaginarioMiguel Angel Mauricio GonzalezAún no hay calificaciones
- MVCL12Documento12 páginasMVCL12Enrique Trujillo SerranoAún no hay calificaciones
- FluoroscopíaDocumento13 páginasFluoroscopíaabeklAún no hay calificaciones
- Tarea 5. Floculación PDFDocumento4 páginasTarea 5. Floculación PDFAna Guadalupe MartínezAún no hay calificaciones
- Cadina Pasta AC PDFDocumento2 páginasCadina Pasta AC PDFCristian CatrihualAún no hay calificaciones
- Excavación Cerro de Las Nieves Pedro Muñoz Otoño 1989Documento15 páginasExcavación Cerro de Las Nieves Pedro Muñoz Otoño 1989Maki65Aún no hay calificaciones
- 5ta Semana de Análisis de Puentes de AceroDocumento59 páginas5ta Semana de Análisis de Puentes de AceroArturo PalominoAún no hay calificaciones
- Caso 1 ProbabilidadDocumento8 páginasCaso 1 ProbabilidaddaniloAún no hay calificaciones
- Umbra y PenumbraDocumento6 páginasUmbra y PenumbraItalo Cristian Yataco ReynosoAún no hay calificaciones
- Informe 7 Del Laboratorio de Química InorgánicaDocumento18 páginasInforme 7 Del Laboratorio de Química InorgánicaisaacAún no hay calificaciones
- Clase EvaporacionDocumento7 páginasClase EvaporacionKarla RebazaAún no hay calificaciones