También podría gustarte
- Cap - Ii, Iii. - Ingroduccion A La Fotogrametria..proyeccionesDocumento35 páginasCap - Ii, Iii. - Ingroduccion A La Fotogrametria..proyeccionesRodriguez Sucapuca Cristhian RaulAún no hay calificaciones
- 10 Consejos para Hacer Time-LapseDocumento6 páginas10 Consejos para Hacer Time-LapseAlvisSantosAún no hay calificaciones
- Laboratorio N°7 Funcion SI Y O-1Documento4 páginasLaboratorio N°7 Funcion SI Y O-1Jorge Gilmar0% (1)
- Presentación TermografíaDocumento3 páginasPresentación Termografíakikeblackberry68Aún no hay calificaciones
- TERMOGRAFIADocumento20 páginasTERMOGRAFIACarolina AbrilAún no hay calificaciones
- Informe Geodesico - ChotaDocumento16 páginasInforme Geodesico - ChotaAbannto YesicaAún no hay calificaciones
- Evaluación de Las Comunicaciones Inalámbricas Lora para Enlaces de Telemetría en DronesDocumento46 páginasEvaluación de Las Comunicaciones Inalámbricas Lora para Enlaces de Telemetría en DronesVictor Molina RetamalAún no hay calificaciones
- Fotogrametría Rpa - 1 CursoDocumento36 páginasFotogrametría Rpa - 1 Cursoenver05Aún no hay calificaciones
- TermografíaDocumento6 páginasTermografíaFederico PereiraAún no hay calificaciones
- Sistemas de Aeronaves Pilotadas A Distancia para Determinar Ilícitos AmbientalesDocumento28 páginasSistemas de Aeronaves Pilotadas A Distancia para Determinar Ilícitos AmbientalesGonzalo MendezAún no hay calificaciones
- Modelado y Control de Un UAVDocumento25 páginasModelado y Control de Un UAVdemo71Aún no hay calificaciones
- 09 AutoPilot Final Mecat R PDFDocumento11 páginas09 AutoPilot Final Mecat R PDFAdonai Zapata G.Aún no hay calificaciones
- Control Remoto y Sincronizacion 21 PDFDocumento6 páginasControl Remoto y Sincronizacion 21 PDFricardogaravito3353Aún no hay calificaciones
- FOTOGRAMETRIADocumento7 páginasFOTOGRAMETRIAJesus VillegasAún no hay calificaciones
- A1ba999a0e53 - BROCHURE DRONES PDFDocumento6 páginasA1ba999a0e53 - BROCHURE DRONES PDFjhons_20_Aún no hay calificaciones
- Curso Virtual de Fotogrametría - FactecDocumento92 páginasCurso Virtual de Fotogrametría - FactecHenry Sosa ZuñigaAún no hay calificaciones
- Diseno e Implementacion de Un Sistema de Control Asistido para Plataforma...Documento110 páginasDiseno e Implementacion de Un Sistema de Control Asistido para Plataforma...Hector Raul Mendez GonzalesAún no hay calificaciones
- Monografia TermografíaDocumento11 páginasMonografia TermografíaJuan Cruz MorettiAún no hay calificaciones
- Ingles Tecnico 16 PDFDocumento10 páginasIngles Tecnico 16 PDFricardogaravito3353Aún no hay calificaciones
- Tesis Final DriverDocumento75 páginasTesis Final DriverJeans PerezAún no hay calificaciones
- Lista Completa de Parametros de ApmDocumento181 páginasLista Completa de Parametros de ApmSteven MartinezAún no hay calificaciones
- JKJHJ D CDocumento59 páginasJKJHJ D CMilton PacciAún no hay calificaciones
- G DUAS OPR DO01 - v1 - Guia - Presentacion.declaracionDocumento7 páginasG DUAS OPR DO01 - v1 - Guia - Presentacion.declaracionaAún no hay calificaciones
- Presentación X8-M y AERO-M DronesDocumento9 páginasPresentación X8-M y AERO-M DronesCarlos Edgar Cambillo CastroAún no hay calificaciones
- Time Lapse 1Documento7 páginasTime Lapse 1yomarcelo1965Aún no hay calificaciones
- Curso de FotogrametriaDocumento2 páginasCurso de FotogrametriaJhancarlos Canchanya JaureguiAún no hay calificaciones
- Expo (Teledetección)Documento25 páginasExpo (Teledetección)Rodrigo AbarcaAún no hay calificaciones
- Curso de AgisoftDocumento3 páginasCurso de AgisoftWilder Huaraz Flores0% (1)
- Presentacion de Servicios - BUILDTECHDocumento30 páginasPresentacion de Servicios - BUILDTECHsergio ustarizAún no hay calificaciones
- Fotogrametría Con Drones para TopografíaDocumento6 páginasFotogrametría Con Drones para TopografíaEmely NicoleAún no hay calificaciones
- Indice Ejemplo Previa-Manual-OperaDocumento5 páginasIndice Ejemplo Previa-Manual-OperatubafinaAún no hay calificaciones
- GPS-RTK en Rpa Xa MDTDocumento48 páginasGPS-RTK en Rpa Xa MDTGonzalo Ferrer FumanalAún no hay calificaciones
- Curso - Termografia y DronesDocumento2 páginasCurso - Termografia y DronesPedro Perez PerezAún no hay calificaciones
- Familiarizacion Con El RPAS (Hardware, Sofware y Firmware)Documento8 páginasFamiliarizacion Con El RPAS (Hardware, Sofware y Firmware)Roberto Riaño Rodríguez100% (1)
- DronesDocumento13 páginasDronesUrbina NicoleAún no hay calificaciones
- Mod II Fotogrametria SiitecDocumento42 páginasMod II Fotogrametria SiitecVideos CaserosAún no hay calificaciones
- Termografía InfrarrojaDocumento6 páginasTermografía InfrarrojaMichael AriasAún no hay calificaciones
- Manual de Topografía Aplicado A La Recolección y Procesamiento de Datos. Tomados Con Drones en Procesos ForensesDocumento106 páginasManual de Topografía Aplicado A La Recolección y Procesamiento de Datos. Tomados Con Drones en Procesos ForensesYonier MosqueraAún no hay calificaciones
- Presentacion Normativa Europea Uas 2 PDFDocumento37 páginasPresentacion Normativa Europea Uas 2 PDFFULL TRXAún no hay calificaciones
- Evaluaciones Con DronesDocumento11 páginasEvaluaciones Con DronesJose QuispeAún no hay calificaciones
- Drones Es en en Es PDFDocumento65 páginasDrones Es en en Es PDFYener M. Avila LozanoAún no hay calificaciones
- Normativa Drons EU - Faq-Ue-Rev-0 PDFDocumento27 páginasNormativa Drons EU - Faq-Ue-Rev-0 PDFNatxo VaronaAún no hay calificaciones
- Fotogrametría Presentacion2Documento15 páginasFotogrametría Presentacion2Julio Cesar Mejia100% (1)
- Receptor GRX1 ManualDocumento57 páginasReceptor GRX1 ManualGeny Alberto Argueta RuizAún no hay calificaciones
- Examen 02 Fot y TelDocumento5 páginasExamen 02 Fot y TelKenlly FC JorkenAún no hay calificaciones
- Topografia DronDocumento18 páginasTopografia Droncamila gonzalezAún no hay calificaciones
- Power Module Puesta A Punto para Medir El Voltaje de La Batería y El Consumo ActualDocumento7 páginasPower Module Puesta A Punto para Medir El Voltaje de La Batería y El Consumo ActualSteven MartinezAún no hay calificaciones
- Stop Motion. OEI. (Módulo 5, Parte II)Documento4 páginasStop Motion. OEI. (Módulo 5, Parte II)acg2013100% (1)
- Generalidades-Desarrollo de Fotogrametría I T PDFDocumento32 páginasGeneralidades-Desarrollo de Fotogrametría I T PDFJamir Enzo GARRO DOROTEOAún no hay calificaciones
- Taller Video LIDAR OkDocumento5 páginasTaller Video LIDAR OkOscar FlorezAún no hay calificaciones
- Los Megapíxeles y Su Funcionamiento en La TecnologíaDocumento5 páginasLos Megapíxeles y Su Funcionamiento en La TecnologíaJOSE GABRIEL GODOY VILLARREALAún no hay calificaciones
- DRONNESDocumento15 páginasDRONNESSadock PeñaAún no hay calificaciones
- Drones CamarasDocumento43 páginasDrones CamarasAngel AlexisAún no hay calificaciones
- Qué Es Un UASDocumento3 páginasQué Es Un UASRossy Medina MorenoAún no hay calificaciones
- AESA DronesDocumento19 páginasAESA Droneslamparone0% (1)
- Comparapix4dagisoft PDFDocumento179 páginasComparapix4dagisoft PDFlinaAún no hay calificaciones
- Sistema Lidar InsicaDocumento11 páginasSistema Lidar InsicapepillodsfjasdfasdAún no hay calificaciones
- Guia de Practica 7Documento1 páginaGuia de Practica 7MARIA DEL PILAR RIOS CHOQUEAún no hay calificaciones
- 03 - Primer VueloDocumento49 páginas03 - Primer VuelovpolooroAún no hay calificaciones
- 02 Suplemento Operativo Ifly Jets 737MAX SpanishDocumento71 páginas02 Suplemento Operativo Ifly Jets 737MAX SpanishpapachinAún no hay calificaciones
- Comprobar pesadora: Revolucionando el control de calidad con la visión por computadoraDe EverandComprobar pesadora: Revolucionando el control de calidad con la visión por computadoraAún no hay calificaciones
- Lista Completa de Parametros de ApmDocumento181 páginasLista Completa de Parametros de ApmSteven MartinezAún no hay calificaciones
- Power Module Puesta A Punto para Medir El Voltaje de La Batería y El Consumo ActualDocumento7 páginasPower Module Puesta A Punto para Medir El Voltaje de La Batería y El Consumo ActualSteven MartinezAún no hay calificaciones
- Instalación Del Módulo de 3DR Ublox GPS + CompassDocumento10 páginasInstalación Del Módulo de 3DR Ublox GPS + CompassSteven MartinezAún no hay calificaciones
- APM 2.5 y 2.6 Información GeneralDocumento19 páginasAPM 2.5 y 2.6 Información GeneralSteven MartinezAún no hay calificaciones
- Conexión de La Entrada de RC y MotoresDocumento14 páginasConexión de La Entrada de RC y MotoresSteven MartinezAún no hay calificaciones
- 8.2 Procedimiento de Calibracion OkDocumento2 páginas8.2 Procedimiento de Calibracion OkElZeroMJAún no hay calificaciones
- 128 - Jaime Lozano - Tarea 3Documento11 páginas128 - Jaime Lozano - Tarea 3Jaime Andres Lozano CeballosAún no hay calificaciones
- Lab 13 Chancador TurpoDocumento3 páginasLab 13 Chancador TurpoAnonymous dqH2vXAún no hay calificaciones
- Advanced Work Queues PDFDocumento18 páginasAdvanced Work Queues PDFLucas cocolocoAún no hay calificaciones
- FDC178 Protecciones ElectricasDocumento5 páginasFDC178 Protecciones ElectricasDANIEL ALEJANDRO SÁNCHEZ BOTIAAún no hay calificaciones
- Dispositivos PasivosDocumento32 páginasDispositivos PasivosEnmanuel David SantamariaAún no hay calificaciones
- AneDocumento9 páginasAneJulian ZamoraAún no hay calificaciones
- Informática 5Documento5 páginasInformática 5RUBENAún no hay calificaciones
- Promodel E3Documento10 páginasPromodel E3nayelli guadalupe cruz ceballosAún no hay calificaciones
- Parcial 2 ..Analisis Estructural IIDocumento3 páginasParcial 2 ..Analisis Estructural IIgabrielAún no hay calificaciones
- Tercer AvanceDocumento17 páginasTercer AvanceJOSUE GUISVERTAún no hay calificaciones
- Optimizacion IIDocumento12 páginasOptimizacion IIJhamilAún no hay calificaciones
- ER A A: Leo MazzucchelliDocumento3 páginasER A A: Leo Mazzucchelligracielaalicia100% (1)
- Guia 3 WordDocumento3 páginasGuia 3 WordCamila LealAún no hay calificaciones
- Tamaño Optimo de MallasDocumento10 páginasTamaño Optimo de Mallasnickel de la cruz fortuna100% (1)
- Controlador de Condensadores PowerIT C200ADocumento8 páginasControlador de Condensadores PowerIT C200AcrcruzpAún no hay calificaciones
- Fu K Practica 11 Columnas Wordart eDocumento1 páginaFu K Practica 11 Columnas Wordart ekmrfromAún no hay calificaciones
- BPR - PDF Nivel 3Documento36 páginasBPR - PDF Nivel 3Maria MarreroAún no hay calificaciones
- Peparación de Olimpiadas de MatemáticasDocumento1 páginaPeparación de Olimpiadas de Matemáticaseleuterioromerope100% (1)
- Redes y HardwareDocumento90 páginasRedes y Hardwarejamer_rincon1209Aún no hay calificaciones
- Cedula de Control de Usuarios SISTRAP - Supervivencia DELEGACIONES Mod24s...Documento2 páginasCedula de Control de Usuarios SISTRAP - Supervivencia DELEGACIONES Mod24s...Carlos AlcoAún no hay calificaciones
- REPRESENTACIÓN - Aproximación Al Estado de La Cuestión 2010Documento39 páginasREPRESENTACIÓN - Aproximación Al Estado de La Cuestión 2010malsesavonAún no hay calificaciones
- Bizagi Process ModelerDocumento8 páginasBizagi Process ModelerFloritzel RodriguezAún no hay calificaciones
- Deber 1 de Electronica IDocumento3 páginasDeber 1 de Electronica IJonathan Medardo BautistaAún no hay calificaciones
- Presentación Fundamentos de ProgramaciónDocumento1 páginaPresentación Fundamentos de ProgramaciónJsonAún no hay calificaciones
- Silabo de Producción AudiovisualDocumento3 páginasSilabo de Producción AudiovisualRoy Lewis Y. AvilezAún no hay calificaciones
- ACPIDocumento130 páginasACPIJavier TapiaAún no hay calificaciones
- ES VEGABAR 83 4 20 MaDocumento2 páginasES VEGABAR 83 4 20 MaFernanda Yañez RiosAún no hay calificaciones
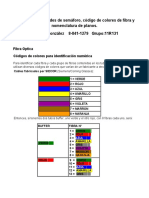
- Fibra Semaforo NomenclaturaDocumento3 páginasFibra Semaforo Nomenclaturaquiel166Aún no hay calificaciones