También podría gustarte
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209De EverandElectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Calificación: 2 de 5 estrellas2/5 (1)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Sistemas de ImpresionDocumento45 páginasSistemas de ImpresionjesusAún no hay calificaciones
- Oscilogramas de Sensores y Actuadores (Cars Marobe)Documento51 páginasOscilogramas de Sensores y Actuadores (Cars Marobe)Javi Sabonis100% (1)
- Inversores de Voltaje - Práctica de LaboratorioDocumento8 páginasInversores de Voltaje - Práctica de LaboratorioIván HerreraAún no hay calificaciones
- Manual Uso Papel Transfer Telas ClarasDocumento5 páginasManual Uso Papel Transfer Telas ClarasluisAún no hay calificaciones
- Octavio Tolmo Tarea2Documento10 páginasOctavio Tolmo Tarea2octavio tolmo100% (1)
- Evaluacion Nom 026 Stps 2008Documento2 páginasEvaluacion Nom 026 Stps 2008Juan Andres Cuevas100% (2)
- Confort BeetleDocumento27 páginasConfort BeetlealexAún no hay calificaciones
- Es Catalogo de EncoderDocumento91 páginasEs Catalogo de EncoderHenry GutierrezAún no hay calificaciones
- EncodersDocumento10 páginasEncodersFrancisco OrtizAún no hay calificaciones
- Sensores Angulares FinalDocumento26 páginasSensores Angulares FinalCRISTIAN ALEJANDRO PARDO MORALESAún no hay calificaciones
- AMX 56 LeclercDocumento7 páginasAMX 56 LeclercLucia Otilia Guzmán VargasAún no hay calificaciones
- Detector Cruce Por CeroDocumento2 páginasDetector Cruce Por CeroKerly Esthefanny100% (1)
- Presentacion Analisis de Falla y Codigos de Diagnostico en Equipos Caterpillar AutoguardadoDocumento84 páginasPresentacion Analisis de Falla y Codigos de Diagnostico en Equipos Caterpillar AutoguardadoGerver Chambi MamaniAún no hay calificaciones
- PROBLEMAS-Capitulo 1 - Ondas ElectromagneticasDocumento6 páginasPROBLEMAS-Capitulo 1 - Ondas ElectromagneticasAnonymous fODEQ0lfAún no hay calificaciones
- Laboratorion°4Documento6 páginasLaboratorion°4Faider Humberto Barrero SanchezAún no hay calificaciones
- Rectificador Monofasico Controlado de Onda CompletaDocumento13 páginasRectificador Monofasico Controlado de Onda CompletaCompu VoipAún no hay calificaciones
- Encoder TeoriaDocumento46 páginasEncoder TeoriaCristian Gomez100% (3)
- Informe Práctica 4 Circuitos Eléctricos I PDFDocumento5 páginasInforme Práctica 4 Circuitos Eléctricos I PDFJohann Montealegre RiveraAún no hay calificaciones
- Reporte Practica 4Documento9 páginasReporte Practica 4Alan GarciaAún no hay calificaciones
- ENCODERDocumento11 páginasENCODERMaibel Ofelia Brea BatistaAún no hay calificaciones
- Rectificador Monofásico SemicontroladoDocumento3 páginasRectificador Monofásico SemicontroladoWilmer Cubas Solano100% (1)
- Rectificador Monofasico SemicontroladoDocumento3 páginasRectificador Monofasico SemicontroladoLuisEnriqueNamigtleAún no hay calificaciones
- Rectificador Monofasico SemicontroladoDocumento3 páginasRectificador Monofasico SemicontroladoLuis RubioAún no hay calificaciones
- HolaDocumento3 páginasHolabrayan dearmasAún no hay calificaciones
- Encoders Incrementales: Señales Sinusoidales, 1VppDocumento1 páginaEncoders Incrementales: Señales Sinusoidales, 1VpparisteoAún no hay calificaciones
- Practica 8 Encoder IncrementalDocumento10 páginasPractica 8 Encoder IncrementalFernando Gutierrez OportoAún no hay calificaciones
- Implementación Del Op Amp de Tensión LM358Documento13 páginasImplementación Del Op Amp de Tensión LM358David EnriquezAún no hay calificaciones
- Poster PotenciaDocumento1 páginaPoster PotenciaFernanda Guillen SalazarAún no hay calificaciones
- Laboratorio 02 - Inversor MonofásicoDocumento4 páginasLaboratorio 02 - Inversor MonofásicoAlejandro Roberth Inchicaqui GutiérrezAún no hay calificaciones
- Circuito Inversor Monofásico Mediante Modulación Por Ancho de Pulso Con Eliminación Selectiva de Armónicos.Documento4 páginasCircuito Inversor Monofásico Mediante Modulación Por Ancho de Pulso Con Eliminación Selectiva de Armónicos.JorgeSanchezAún no hay calificaciones
- 2.2 Encoder Abs - Incremental - Oct2017 - Febrero 2018Documento20 páginas2.2 Encoder Abs - Incremental - Oct2017 - Febrero 2018SantiGuanoluisaAún no hay calificaciones
- Facultad de Ciencias E Ingeníerias Físicas Y Formales: Universidad Católica de Santa MaríaDocumento14 páginasFacultad de Ciencias E Ingeníerias Físicas Y Formales: Universidad Católica de Santa MaríaTarrishoAún no hay calificaciones
- Generador de Pulsos: Con Selector y Control Fino de FrecuenciaDocumento5 páginasGenerador de Pulsos: Con Selector y Control Fino de FrecuenciaDanielaAún no hay calificaciones
- Oscilador ElectrónicoDocumento4 páginasOscilador Electrónicocamilo100% (1)
- Laboratorio de Instrumentacion de MedidasDocumento8 páginasLaboratorio de Instrumentacion de MedidasJoel Cotrina SangayAún no hay calificaciones
- Practica #5 Electronica IndustrialDocumento8 páginasPractica #5 Electronica IndustrialBriian EnriqueAún no hay calificaciones
- Zero CrossingDocumento3 páginasZero CrossingEiverPaltaAún no hay calificaciones
- Convertidor DC/AC (Inversor) de 220Hz Controlado Por Ancho de Pulso Con Modulaci On Sinusoidal SPWMDocumento6 páginasConvertidor DC/AC (Inversor) de 220Hz Controlado Por Ancho de Pulso Con Modulaci On Sinusoidal SPWMMORE SILVA JORGE RONALDOAún no hay calificaciones
- GEN-1 EQUi-1 InformeDocumento9 páginasGEN-1 EQUi-1 InformeJohn Huertas MontesAún no hay calificaciones
- Laboratorio Electronica Recortadores de OndaDocumento19 páginasLaboratorio Electronica Recortadores de OndadiegoAún no hay calificaciones
- Rectificador Monofásico de Media Onda ControladoDocumento3 páginasRectificador Monofásico de Media Onda ControladoOscar Wladimir IglesiasAún no hay calificaciones
- Codificador de Posición AngularDocumento4 páginasCodificador de Posición AngularTammy WashingtonAún no hay calificaciones
- Sensores Varios TiposDocumento3 páginasSensores Varios Tiposcristian gonzalezAún no hay calificaciones
- Electronica de PotenciaDocumento3 páginasElectronica de PotenciaJeison Acuña Nadjar100% (1)
- Lab Citro 1-1Documento7 páginasLab Citro 1-1JesusVilcaYepezAún no hay calificaciones
- Laboratorio 4 CompletoDocumento20 páginasLaboratorio 4 CompletoStalin CaisaguanoAún no hay calificaciones
- Guia de Trabajos Practicos de Laboratorio L2Documento8 páginasGuia de Trabajos Practicos de Laboratorio L2esaAún no hay calificaciones
- Explicación Universal TrainerDocumento9 páginasExplicación Universal TrainerYesmi SotoAún no hay calificaciones
- Control SPWMDocumento3 páginasControl SPWMWilson Giovanny MedinaAún no hay calificaciones
- Lab 03Documento24 páginasLab 03Lalo Paolo Perez CamiloAún no hay calificaciones
- Inversor de 12 VDC 120 Vac y 60hz - HTMLDocumento14 páginasInversor de 12 VDC 120 Vac y 60hz - HTMLRoberto LopezAún no hay calificaciones
- Circuito Rectificador de Media Onda Controlado Por Fase Con Disparo Sincronizado Al Pulso de Un Circuito Detector de Cruce Por Cero.Documento14 páginasCircuito Rectificador de Media Onda Controlado Por Fase Con Disparo Sincronizado Al Pulso de Un Circuito Detector de Cruce Por Cero.Kewin Llbo100% (1)
- Practica Analogica 4Documento5 páginasPractica Analogica 4CARLOSAún no hay calificaciones
- Circuitos Limitadores de Voltaje y Rectificador de Media OndaDocumento12 páginasCircuitos Limitadores de Voltaje y Rectificador de Media OndaAlexis SalvadorAún no hay calificaciones
- Osciladores DiscretosDocumento13 páginasOsciladores DiscretosXavier PalaciosAún no hay calificaciones
- Informe-6-Lab Electronicos 2Documento15 páginasInforme-6-Lab Electronicos 2Nando AlarconAún no hay calificaciones
- Laboratorio 6 Informe ANALOGICA 2Documento24 páginasLaboratorio 6 Informe ANALOGICA 2PERA peraAún no hay calificaciones
- Curvas de Transistor BipolarprevioDocumento19 páginasCurvas de Transistor BipolarpreviogeraldineAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Lab TransfereciaDocumento1 páginaLab TransfereciaAlberto PertuzAún no hay calificaciones
- Diseño de Ejes y Circulo de MohrDocumento7 páginasDiseño de Ejes y Circulo de MohrAlberto PertuzAún no hay calificaciones
- Ensayo de Traccion BiaxialDocumento19 páginasEnsayo de Traccion BiaxialAlberto PertuzAún no hay calificaciones
- Metodos de Fabricación de EngranajesDocumento15 páginasMetodos de Fabricación de Engranajesstratgia100% (2)
- Ejemplo Velocidad de CorteDocumento7 páginasEjemplo Velocidad de CorteAlberto PertuzAún no hay calificaciones
- Teodolito ElectrónicoDocumento3 páginasTeodolito ElectrónicoJuan Millones100% (1)
- Decreto 103-96Documento7 páginasDecreto 103-96Anonymous wOkMRd5Aún no hay calificaciones
- T1 (E3) IluminaciónDocumento11 páginasT1 (E3) IluminaciónMargarita CastañoAún no hay calificaciones
- Ejercicio 10.60 CengelDocumento12 páginasEjercicio 10.60 CengelJosé BrusquettiAún no hay calificaciones
- Presentación - Uprint 2Documento30 páginasPresentación - Uprint 2Mundo del PlacerAún no hay calificaciones
- Ss 2000Documento2 páginasSs 2000Yamile Laverde VargasAún no hay calificaciones
- Exdic 2001Documento2 páginasExdic 2001ivanmirzasatriawanxxAún no hay calificaciones
- Ms Word 5to Primaria FormatoDocumento4 páginasMs Word 5to Primaria FormatoEder Guerrero BAún no hay calificaciones
- Allondra - Actualizado 21.06Documento38 páginasAllondra - Actualizado 21.06Caro Porrini20% (5)
- Lab 1 - Ley de Reflexion PDFDocumento9 páginasLab 1 - Ley de Reflexion PDFOLGA JIMENA CAQUIMBO CUBILLOSAún no hay calificaciones
- Practica #4 CosimirDocumento4 páginasPractica #4 Cosimirjulfo05Aún no hay calificaciones
- Canicas ExpoDocumento11 páginasCanicas ExpoDALIAAún no hay calificaciones
- Peru (Caracteristicas Del Documento Nacional de Identidad)Documento11 páginasPeru (Caracteristicas Del Documento Nacional de Identidad)Jherson ParedesAún no hay calificaciones
- Insolación y ReveladoDocumento11 páginasInsolación y ReveladoFaby FentanesAún no hay calificaciones
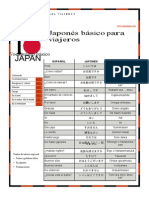
- Japones Basico para ViajerosDocumento7 páginasJapones Basico para ViajerosSamAún no hay calificaciones
- User Guide OTDR Spanish 1068998Documento237 páginasUser Guide OTDR Spanish 1068998juanAún no hay calificaciones
- Proyecto Caja de Cambios ColinealDocumento11 páginasProyecto Caja de Cambios ColinealTavo CoaquiraAún no hay calificaciones
- Control Volante Stereo RenaultDocumento12 páginasControl Volante Stereo RenaultAlex SalgadoAún no hay calificaciones
- Comunicacion Tomo 1Documento91 páginasComunicacion Tomo 1ElenaZarate100% (1)
- Conosca Las Partes de Un Cartucho de TonerDocumento39 páginasConosca Las Partes de Un Cartucho de TonerJuan Guerra ValderramaAún no hay calificaciones
- Catalogo Moldes Interton 2017 01 WebDocumento12 páginasCatalogo Moldes Interton 2017 01 WebLeyre Love HeAún no hay calificaciones
- Todo Sobre Tipos de ImpresorasDocumento3 páginasTodo Sobre Tipos de ImpresorasMundoImpresorasAún no hay calificaciones
- Gestión Auxiliar de ReproducciónDocumento10 páginasGestión Auxiliar de ReproducciónRUYSDAEL DARWIN CHACA YAURIAún no hay calificaciones
- Imprimir SistDocumento17 páginasImprimir SistAlex Jr SullnAún no hay calificaciones