También podría gustarte
- Practica Jonathan Chambi MamaniDocumento3 páginasPractica Jonathan Chambi MamaniDIANA CHAMBIAún no hay calificaciones
- Matlab Lab 2Documento12 páginasMatlab Lab 2KevinEcosAlaAún no hay calificaciones
- Laboratorio de Teoría de Control IIDocumento23 páginasLaboratorio de Teoría de Control IIbjcfAún no hay calificaciones
- Solucion LiliamDocumento11 páginasSolucion LiliamSergio Chapilliquen JacintoAún no hay calificaciones
- SOLUCIÓN mm2Documento4 páginasSOLUCIÓN mm2Yrdy DzdzAún no hay calificaciones
- Fundamento Matemático de Los Sistemas de ControlDocumento12 páginasFundamento Matemático de Los Sistemas de ControlNestor GuillenAún no hay calificaciones
- Correccion - Examen Unidad - Jorge - MacedoDocumento19 páginasCorreccion - Examen Unidad - Jorge - MacedoJorgeMCAún no hay calificaciones
- Solucionario Examen Recuperatorio G 1 2020 Diseño de SistemasDocumento5 páginasSolucionario Examen Recuperatorio G 1 2020 Diseño de SistemasCristian ChoZegAún no hay calificaciones
- Diseño de Columnas Por Diagrama de InteracciónDocumento68 páginasDiseño de Columnas Por Diagrama de InteracciónJonathan Jhersson Chavez CaleroAún no hay calificaciones
- Ejercicio - Curva CircularDocumento6 páginasEjercicio - Curva CircularAlvaro Benítez MelgarejoAún no hay calificaciones
- Carretera P1Documento7 páginasCarretera P1Camilo Soliz julienAún no hay calificaciones
- Informe - 02 RELACION DE LA RESPUESTA EN FRECUENCIADocumento8 páginasInforme - 02 RELACION DE LA RESPUESTA EN FRECUENCIAAnonymous L6eUQ57lAún no hay calificaciones
- Ejercicios Obras Hidraulicas - Practica de CanalesDocumento9 páginasEjercicios Obras Hidraulicas - Practica de CanalesAna Hermoza VasquezAún no hay calificaciones
- PRACTICA 4 Eletrotecnia 2 LaboratorioDocumento31 páginasPRACTICA 4 Eletrotecnia 2 LaboratorioExpresion GeekAún no hay calificaciones
- Diseño de CimentacionesDocumento35 páginasDiseño de CimentacionesLisbeth TantasAún no hay calificaciones
- Trigonometria Anual Tema06Documento3 páginasTrigonometria Anual Tema06nashita1Aún no hay calificaciones
- Metodo de DesplazamientosDocumento10 páginasMetodo de DesplazamientosAldo CamposAún no hay calificaciones
- Curva InversaDocumento9 páginasCurva InversaIVAN DIEGO MORALES RODRIGUEZAún no hay calificaciones
- Ramos Sanchez David ManuelDocumento2 páginasRamos Sanchez David ManuelDavid Manuel Ramos SanchezAún no hay calificaciones
- Informe - 02 RELACION DE LA RESPUESTA EN FRECUENCIADocumento9 páginasInforme - 02 RELACION DE LA RESPUESTA EN FRECUENCIAjose carlos sanches llanosAún no hay calificaciones
- Ejercicios Resueltos Sobre Alineamiento Horizontal - ViasDocumento7 páginasEjercicios Resueltos Sobre Alineamiento Horizontal - ViasjessicaAún no hay calificaciones
- Ingenieria de Diseño de Viales.Documento26 páginasIngenieria de Diseño de Viales.Cassandra Cortez MairenaAún no hay calificaciones
- SOLUCION DEL EXAMEN NºI SEM I-2015 PREGUNTA No.5Documento4 páginasSOLUCION DEL EXAMEN NºI SEM I-2015 PREGUNTA No.5Ricardo EspindolaAún no hay calificaciones
- Diseño ZapatasDocumento42 páginasDiseño ZapatasLalo Eduardo Yurquina GallardoAún no hay calificaciones
- Problemas de ControlDocumento11 páginasProblemas de ControlRomeo OrtegaAún no hay calificaciones
- Trabajo de Recuperación AlejandroDocumento17 páginasTrabajo de Recuperación AlejandroAlex WidooAún no hay calificaciones
- S11.s2 Ejercicios de TurbinasDocumento2 páginasS11.s2 Ejercicios de TurbinasAprende A ConducirAún no hay calificaciones
- Ejercicio 5Documento8 páginasEjercicio 501-IC-HU-LUIS RICARDO RAMOS YURAAún no hay calificaciones
- Angulos CuadrantalesDocumento4 páginasAngulos CuadrantalesFernando Tapia100% (1)
- Empalme de Columnas CircularesDocumento16 páginasEmpalme de Columnas CircularesINGYARQAún no hay calificaciones
- TAREA No.3 - CIRCUITOS ELÉCTRICOS I Alejandro BetancurDocumento3 páginasTAREA No.3 - CIRCUITOS ELÉCTRICOS I Alejandro BetancurAlejandro Betancur Agudelo64% (11)
- Resolución 2da FaseDocumento4 páginasResolución 2da FaseBlamir Guillen Flores100% (1)
- Concreto IiDocumento32 páginasConcreto IiJoshe Luis Reque QuesquenAún no hay calificaciones
- Modelamiento de Sistemas Eléctricos y MecanicosDocumento23 páginasModelamiento de Sistemas Eléctricos y MecanicosEmilyRiveraTovarAún no hay calificaciones
- 1er Problema Bombas RadialesDocumento6 páginas1er Problema Bombas RadialesEric ZamoraAún no hay calificaciones
- Curva Dos RadiosDocumento9 páginasCurva Dos RadiosIVAN DIEGO MORALES RODRIGUEZAún no hay calificaciones
- MATEMÁTICAS 4 RESOLUCIÓN REPASO, Segundo ParcialDocumento11 páginasMATEMÁTICAS 4 RESOLUCIÓN REPASO, Segundo ParcialGiovanni LópezAún no hay calificaciones
- Curva de Dos Radios 13-Abril2019Documento4 páginasCurva de Dos Radios 13-Abril2019Iver HuanacotaAún no hay calificaciones
- Calculo de Una CurvaDocumento8 páginasCalculo de Una Curvaluchin_ing183034Aún no hay calificaciones
- Respuestas Hormigon Armado II 2do Sem. 2017Documento9 páginasRespuestas Hormigon Armado II 2do Sem. 2017marco gonzalesAún no hay calificaciones
- Solución Investigación - PROBLEMA 1Documento2 páginasSolución Investigación - PROBLEMA 1Oscar QuispeAún no hay calificaciones
- Clase Consumo Intertemporal CompletoDocumento40 páginasClase Consumo Intertemporal CompletoIngenio UniversitarioAún no hay calificaciones
- Sgdo Parcial MATE I 2022-II LNDocumento8 páginasSgdo Parcial MATE I 2022-II LNJet Ruiz sanchezAún no hay calificaciones
- Examen Caminos 1Documento4 páginasExamen Caminos 1AtalayaMichaelAún no hay calificaciones
- Zapata ConectadasDocumento8 páginasZapata Conectadas01-IC-HU-LUIS RICARDO RAMOS YURAAún no hay calificaciones
- Inf1 ListoDocumento23 páginasInf1 ListoJorge Luis BPAún no hay calificaciones
- Calculo DiferencialDocumento3 páginasCalculo Diferencialmilagro babiloniaAún no hay calificaciones
- Libro de Economia Matematica IIIDocumento90 páginasLibro de Economia Matematica IIINoeQuispeGordillo100% (3)
- 1era Parte Solucionario de Libro 5to Matematica Cobeñas NaquicheDocumento103 páginas1era Parte Solucionario de Libro 5to Matematica Cobeñas NaquichejulioAún no hay calificaciones
- Curvas XDDocumento4 páginasCurvas XDEmerson TarazonaAún no hay calificaciones
- Problemas TurbinasDocumento10 páginasProblemas TurbinasBENYAún no hay calificaciones
- Taller Lote Economico Julian AlmanzaDocumento8 páginasTaller Lote Economico Julian AlmanzaJulián AlmanzaAún no hay calificaciones
- Casos Practicos DemandaDocumento21 páginasCasos Practicos DemandaLuis David Salinas TorresAún no hay calificaciones
- Tarea FisicaDocumento10 páginasTarea FisicamvasquezyanpedrAún no hay calificaciones
- Monografia de Calculo 2Documento21 páginasMonografia de Calculo 2Luis RauseoAún no hay calificaciones
- Practica IVDocumento16 páginasPractica IVAleydaAún no hay calificaciones
- Trigo 4Documento5 páginasTrigo 4Jose Luis Santillan Huamanttica100% (1)
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Punto 5 ParcialDocumento2 páginasPunto 5 Parcialerszebeth5558798Aún no hay calificaciones
- Densidad Energia Eolica 80m 13Documento1 páginaDensidad Energia Eolica 80m 13Oscar GómezAún no hay calificaciones
- Problemas Resueltos Cap 20 Fisica SerwayDocumento26 páginasProblemas Resueltos Cap 20 Fisica SerwayDiego Castro100% (2)
- Calculo de Comision Por Vendedor en ExcelDocumento2 páginasCalculo de Comision Por Vendedor en Excelerszebeth5558798Aún no hay calificaciones
- Una Entidad Estatal Puede Usar Un Edificio a Que Requiere 5 Millones de Dólares Como Costo de Mantenimiento y 6 Millones de Dólares Cada 5 Años Para Reparaciones o Puede Usar El Edifico B Que Requiere 5Documento3 páginasUna Entidad Estatal Puede Usar Un Edificio a Que Requiere 5 Millones de Dólares Como Costo de Mantenimiento y 6 Millones de Dólares Cada 5 Años Para Reparaciones o Puede Usar El Edifico B Que Requiere 5Sergio Ramos0% (1)
- Formato Apa GeneralDocumento18 páginasFormato Apa GeneralJonathan' Cuotto Dellán'Aún no hay calificaciones
- Control A Bili DadDocumento16 páginasControl A Bili DaddzarturoAún no hay calificaciones
- Akzo Nobel - FT HOT MELT 356 ADocumento3 páginasAkzo Nobel - FT HOT MELT 356 Aerszebeth5558798Aún no hay calificaciones
- Taller Costos Por Ordenes de ProduccionDocumento3 páginasTaller Costos Por Ordenes de Produccionerszebeth5558798Aún no hay calificaciones
- PielDocumento1 páginaPielerszebeth5558798Aún no hay calificaciones
- Akzo Nobel - FT HOT MELT 356 ADocumento3 páginasAkzo Nobel - FT HOT MELT 356 Aerszebeth5558798Aún no hay calificaciones
- Taller Costos Por ProcesoDocumento7 páginasTaller Costos Por Procesoerszebeth5558798Aún no hay calificaciones
- Pigmentos - SyqDocumento3 páginasPigmentos - Syqerszebeth5558798Aún no hay calificaciones
- Oscar GómezDocumento2 páginasOscar Gómezerszebeth5558798Aún no hay calificaciones
- Densidad Energia Eolica 80m 13Documento1 páginaDensidad Energia Eolica 80m 13Oscar GómezAún no hay calificaciones
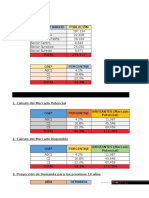
- Mercado ReguladoDocumento1 páginaMercado Reguladoerszebeth5558798Aún no hay calificaciones
- Guia Didactica 1 - GSIDocumento36 páginasGuia Didactica 1 - GSISory N. MartinezAún no hay calificaciones
- Plano EléctricoDocumento1 páginaPlano Eléctricoerszebeth5558798Aún no hay calificaciones
- Otras Fuentes Renovales. Santiago Ortega - EIA PDFDocumento67 páginasOtras Fuentes Renovales. Santiago Ortega - EIA PDFerszebeth5558798Aún no hay calificaciones
- Configuración de La PantallaDocumento7 páginasConfiguración de La Pantallaerszebeth5558798Aún no hay calificaciones
- Se Dispara Un Proyectil Verticalmente Hacia Ariba Con Una Velocidad de 50 MDocumento10 páginasSe Dispara Un Proyectil Verticalmente Hacia Ariba Con Una Velocidad de 50 Merszebeth5558798100% (1)
- TechosVerdes PantallaDocumento86 páginasTechosVerdes PantallaVari VillagarciaAún no hay calificaciones
- Sec Pv1 Pendulo Invertido 1314a-5195Documento12 páginasSec Pv1 Pendulo Invertido 1314a-5195Eddy León RamírezAún no hay calificaciones
- Evidencia 6 Proyecto Plan de Manejo Ambiental PMA V2 PDFDocumento3 páginasEvidencia 6 Proyecto Plan de Manejo Ambiental PMA V2 PDFAlberto Gonzalez Pena0% (5)
- NaturalGasPerspectives. Daniel FelipeDiaz - WECColombiaDocumento20 páginasNaturalGasPerspectives. Daniel FelipeDiaz - WECColombiaerszebeth5558798Aún no hay calificaciones
- NaturalGasPerspectives. Daniel FelipeDiaz - WECColombiaDocumento20 páginasNaturalGasPerspectives. Daniel FelipeDiaz - WECColombiaerszebeth5558798Aún no hay calificaciones
- Otras Fuentes Renovales. Santiago Ortega - EIA PDFDocumento67 páginasOtras Fuentes Renovales. Santiago Ortega - EIA PDFerszebeth5558798Aún no hay calificaciones
- EnergiaSolar GabrielJaimeLopez - UPB PDFDocumento81 páginasEnergiaSolar GabrielJaimeLopez - UPB PDFerszebeth5558798Aún no hay calificaciones
- Derecho de La Energía. Luis Ferney Moreno - UExternadoDocumento16 páginasDerecho de La Energía. Luis Ferney Moreno - UExternadoerszebeth5558798Aún no hay calificaciones