También podría gustarte
- Cayetano Paulino Cristian Jesus AE 1.1.1 UML E2 408Documento5 páginasCayetano Paulino Cristian Jesus AE 1.1.1 UML E2 408Cristianjesus CayetanopaulinoAún no hay calificaciones
- TO RoboticaDocumento40 páginasTO RoboticaMarc Parron Garcia100% (1)
- Practicas de Sistemas EmbebidosDocumento7 páginasPracticas de Sistemas EmbebidosFRANCAO YT100% (1)
- Practica 5 ColorDocumento2 páginasPractica 5 ColorfernandarcosAún no hay calificaciones
- Examen Segundo Parcial (Segunda Vuelta) - Feb-19Documento7 páginasExamen Segundo Parcial (Segunda Vuelta) - Feb-19Gabriel LARA ANGUIANO50% (2)
- Curso Basico Robot Fanuc UpaDocumento57 páginasCurso Basico Robot Fanuc UpaRene Axel Montes RochaAún no hay calificaciones
- Tesina Profecional Inteligencia ArtificialDocumento35 páginasTesina Profecional Inteligencia ArtificialHermes Uriel Lugo HernandezAún no hay calificaciones
- ProgramaciónDocumento7 páginasProgramaciónIbrahim Xaca ZepedaAún no hay calificaciones
- Unidad 1 Electricidad, Ejercicio Feedback SolucionDocumento6 páginasUnidad 1 Electricidad, Ejercicio Feedback Solucionandres100% (1)
- To Automatizacion MonitorizacionDocumento11 páginasTo Automatizacion MonitorizacionAsier LARMA ETXEBARRIAAún no hay calificaciones
- U3 - Actividad Cuadro Comparativo - Estructuras de Control de FlujoDocumento2 páginasU3 - Actividad Cuadro Comparativo - Estructuras de Control de FlujoRodolfo AZ0% (5)
- Proyecto Final Automatizaci N IndustrialDocumento15 páginasProyecto Final Automatizaci N IndustrialIsa ReyesAún no hay calificaciones
- S7-SCL - Getting StartedDocumento28 páginasS7-SCL - Getting StartedAdarleen Arevalo ValleAún no hay calificaciones
- To RoboticaColaborativa V001Documento10 páginasTo RoboticaColaborativa V001David GutierrezAún no hay calificaciones
- To Monitorización de Procesos 2011Documento10 páginasTo Monitorización de Procesos 2011adrianahoukiAún no hay calificaciones
- Propuesta de Trabajo Obligatorio ElectricidadDocumento59 páginasPropuesta de Trabajo Obligatorio ElectricidadJuan MarquezAún no hay calificaciones
- Practica 4Documento6 páginasPractica 4Adriana MartzAún no hay calificaciones
- M083 UD6 E5 Yady SuarezDocumento1 páginaM083 UD6 E5 Yady Suarezyacasugo100% (1)
- M083 UD6 E4 Yady SuárezDocumento13 páginasM083 UD6 E4 Yady SuárezCarolina Suárez100% (5)
- Curso de Monitorización de Procesos PDFDocumento2 páginasCurso de Monitorización de Procesos PDFIvana QuirozAún no hay calificaciones
- Es Un Sensor de Temperatura Simple Hecho Con Un LM35 y Un PIC16F873A Que Expresará La Temperatura Medida en Un Display LCD de 16x2Documento9 páginasEs Un Sensor de Temperatura Simple Hecho Con Un LM35 y Un PIC16F873A Que Expresará La Temperatura Medida en Un Display LCD de 16x2Jhonny Jhon Laguna LimahuayaAún no hay calificaciones
- Comunicaciones Industriales 4 Conexion Ethernet MicroLogixDocumento23 páginasComunicaciones Industriales 4 Conexion Ethernet MicroLogixRicardo ZzeroAún no hay calificaciones
- RPM Con Entradas de Alta Velocidad Con Software WPLSoftDocumento6 páginasRPM Con Entradas de Alta Velocidad Con Software WPLSoftJuan DavidAún no hay calificaciones
- Curso Logo! 8 - Módulo 5 - OkDocumento16 páginasCurso Logo! 8 - Módulo 5 - OkFernando Gustavo LorenzoAún no hay calificaciones
- M083 Ud6 E4Documento2 páginasM083 Ud6 E4Mary jane25% (4)
- Laboratorio 1 Estaciones Mps - CirosDocumento9 páginasLaboratorio 1 Estaciones Mps - Cirosjankarlo arevaloAún no hay calificaciones
- PM5110Documento17 páginasPM5110Robinson Ramirez SanchezAún no hay calificaciones
- Simulación de Un Proceso de Ensamblaje Por Soldadura en RobotStudioDocumento31 páginasSimulación de Un Proceso de Ensamblaje Por Soldadura en RobotStudioDavid Estevez Fernandez100% (2)
- Práctica Seguridad GNS3Documento39 páginasPráctica Seguridad GNS3Andrés Felipe Gamboa TorresAún no hay calificaciones
- 2.agenda TelefónicaDocumento23 páginas2.agenda Telefónicamatatigr94Aún no hay calificaciones
- Grafcet 1Documento8 páginasGrafcet 1JorgeAún no hay calificaciones
- Direccionamiento Indirecto Step 7Documento14 páginasDireccionamiento Indirecto Step 7José Luis Rosales GonzálezAún no hay calificaciones
- Ejercicio FeedbackDocumento2 páginasEjercicio FeedbackDaniel DíazAún no hay calificaciones
- Guía de Primeros Pasos Con CMMT-As-PN - Rev3Documento20 páginasGuía de Primeros Pasos Con CMMT-As-PN - Rev3Tomas GVAún no hay calificaciones
- LPAIC2010Documento189 páginasLPAIC2010Oskar RockdriguezAún no hay calificaciones
- Vision ArtificialDocumento23 páginasVision ArtificialNatalia G LazcanoAún no hay calificaciones
- Prt6 Automatismos - Uso de Guía Gemma LogoDocumento4 páginasPrt6 Automatismos - Uso de Guía Gemma LogopaKoSTeAún no hay calificaciones
- Estructura General de Un PLCDocumento4 páginasEstructura General de Un PLCFabián ChabléAún no hay calificaciones
- Sistemas Embebidos I-2010Documento195 páginasSistemas Embebidos I-2010Gerardo Avendaño PlataAún no hay calificaciones
- Laboratorio 1 - Estaciones MPSDocumento15 páginasLaboratorio 1 - Estaciones MPSDeysi Castillo AguilarAún no hay calificaciones
- Cap. 6 - RATDocumento27 páginasCap. 6 - RATWilmer RomeroAún no hay calificaciones
- Simulación Del RSLogix Emulate 5000Documento10 páginasSimulación Del RSLogix Emulate 5000EJASMANYAún no hay calificaciones
- Grafcet PDFDocumento9 páginasGrafcet PDFCristina Bermúdez CuelloAún no hay calificaciones
- Guia de Aprendizaje 3Documento8 páginasGuia de Aprendizaje 3Katherin ContrerasAún no hay calificaciones
- Ejemplo Manual de InstalaciónDocumento24 páginasEjemplo Manual de InstalaciónAbelardo Willibaldo Ramírez GarcíaAún no hay calificaciones
- S7-300 Profibus PracticaDocumento43 páginasS7-300 Profibus PracticaEspinoza EstebanAún no hay calificaciones
- Grafcet A LadderDocumento2 páginasGrafcet A LadderLuciana Martínez100% (1)
- PPTGrafcetBasico 050319Documento78 páginasPPTGrafcetBasico 050319josemusic23Aún no hay calificaciones
- TEMA 3. Programación de Robots Ejercicios Solucion - OCWDocumento5 páginasTEMA 3. Programación de Robots Ejercicios Solucion - OCWmarivel ochoa cortezAún no hay calificaciones
- Logo - Prueba de Funciones LogicasDocumento1 páginaLogo - Prueba de Funciones LogicasJulio Tomas Trujillo CastroAún no hay calificaciones
- SILABO Introducción A Ing - MecatrónicaDocumento2 páginasSILABO Introducción A Ing - MecatrónicaGabriel Villamar Morales0% (1)
- Contador ArduinoDocumento1 páginaContador ArduinoalanitotkdAún no hay calificaciones
- Cosimir Tutorial en Esp A05v12n1Documento5 páginasCosimir Tutorial en Esp A05v12n1inanjaanpaAún no hay calificaciones
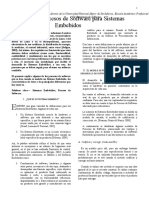
- Modelos de Procesos de Software para Sistemas EmbebidosDocumento4 páginasModelos de Procesos de Software para Sistemas EmbebidosSaroff Yataco IrrazábalAún no hay calificaciones
- Guía de Estudio para La PruebaDocumento2 páginasGuía de Estudio para La PruebaMR 2Aún no hay calificaciones
- M027 UD12 EFb1Documento12 páginasM027 UD12 EFb1Sinai Soto CarmonaAún no hay calificaciones
- Bases de Datos Activas IIDocumento23 páginasBases de Datos Activas IIDaniel FrcAún no hay calificaciones
- CIROS Advanced Mechatronics Manual ESDocumento344 páginasCIROS Advanced Mechatronics Manual ESJose CarlosAún no hay calificaciones
- Ejemplo Rapid PDFDocumento14 páginasEjemplo Rapid PDFelmacuarro5Aún no hay calificaciones
- Rapid SplitDocumento5 páginasRapid SplitAlma ArellanoAún no hay calificaciones
- RapidDocumento26 páginasRapidHiroshi KannoAún no hay calificaciones
- Como Realizar Un ProgramaDocumento5 páginasComo Realizar Un Programaisraelpilin123Aún no hay calificaciones
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- 2.U1 AlgoritmosDocumento17 páginas2.U1 AlgoritmosaibarAún no hay calificaciones
- Funciones (Do - While) y Función (For)Documento4 páginasFunciones (Do - While) y Función (For)melissa suinAún no hay calificaciones
- Guias VBDocumento29 páginasGuias VBcabetomendez100% (3)
- KFPR Conclusion GDocumento2 páginasKFPR Conclusion GpruebasAún no hay calificaciones
- Guia Condicionales Ciclos JavaDocumento13 páginasGuia Condicionales Ciclos JavaJose A MarquezAún no hay calificaciones
- Formato General - Español 3 (ReparadoCopia)Documento41 páginasFormato General - Español 3 (ReparadoCopia)Santos Gabriel CrusAún no hay calificaciones
- Programacion PHPDocumento10 páginasProgramacion PHPdaniel camachoAún no hay calificaciones
- Capitulo 2-Algoritmos y LogicaDocumento30 páginasCapitulo 2-Algoritmos y LogicaTomás AriasAún no hay calificaciones
- How To Think Like A Computer Scientist - 5 ESDocumento30 páginasHow To Think Like A Computer Scientist - 5 ESEduardo e isabellaAún no hay calificaciones
- Clase Microcontroladores Arduino PDFDocumento11 páginasClase Microcontroladores Arduino PDFdiego.blanco.santiago1247Aún no hay calificaciones
- Silabo Lenguaje de Programacion EstructuradoDocumento6 páginasSilabo Lenguaje de Programacion EstructuradoCristina Mayhuasca CrespoAún no hay calificaciones
- Instrucciones Repetitivas en Lenguaje CDocumento17 páginasInstrucciones Repetitivas en Lenguaje CGonzález Trejo Mónica LizbethAún no hay calificaciones
- ConoDocumento34 páginasConoCarlos GarnilloAún no hay calificaciones
- Estructuras de Control en JavaDocumento44 páginasEstructuras de Control en JavaLugano Perlosi Melos100% (1)
- ProgramacionDocumento17 páginasProgramacionrosaylinAún no hay calificaciones
- TLP Sesión 4 Instrucciones de Repetición ForDocumento16 páginasTLP Sesión 4 Instrucciones de Repetición ForSheyla RosaAún no hay calificaciones
- Introducción A La Algoritmia y Programación PDFDocumento27 páginasIntroducción A La Algoritmia y Programación PDFBrunoAún no hay calificaciones
- Cuestionario ArduinoDocumento16 páginasCuestionario ArduinoAlex J. Prieto GuzmánAún no hay calificaciones
- Visual Basic 2012Documento141 páginasVisual Basic 2012Rosmeri Delgado GuerreroAún no hay calificaciones
- Práctica2 SentenciasControlDocumento22 páginasPráctica2 SentenciasControlJenny Paulet Rojas torresAún no hay calificaciones
- 07 Programacion MatlabDocumento28 páginas07 Programacion MatlabJuan Ruiz TelloAún no hay calificaciones
- Actividad 3 - Programación EstructuradaDocumento8 páginasActividad 3 - Programación EstructuradaTakeshi Kovacs100% (1)
- 01 - 01 Programación en VBADocumento34 páginas01 - 01 Programación en VBAEstefaniAún no hay calificaciones
- Semana 6 - Estructura IFDocumento12 páginasSemana 6 - Estructura IFJulio ArboledaAún no hay calificaciones
- Bucles y Arreglos en Java PresentaciónDocumento14 páginasBucles y Arreglos en Java PresentaciónHolberVillaAún no hay calificaciones
- Algunas Decripciones If, For Next, Listbox VbaDocumento7 páginasAlgunas Decripciones If, For Next, Listbox VbaGustavo CastroAún no hay calificaciones
- Guã - A #6 Ejercicios Prã - Cticos - Semana 7Documento6 páginasGuã - A #6 Ejercicios Prã - Cticos - Semana 7nicky70022040Aún no hay calificaciones