También podría gustarte
- Ejercicios de VentiladoresDocumento4 páginasEjercicios de VentiladoresCristian Ookami Ccencho100% (1)
- Unidad 1-Hidraulica de CanalesDocumento22 páginasUnidad 1-Hidraulica de CanalesRa Ferez100% (1)
- Daniela Perez - Causalidad Global en Cosmologia - Ajuste FinoDocumento95 páginasDaniela Perez - Causalidad Global en Cosmologia - Ajuste FinoJorge LuisAún no hay calificaciones
- AEII Metodos Energeticos Castigliano Deformaciones en Armaduras IsostaticasDocumento19 páginasAEII Metodos Energeticos Castigliano Deformaciones en Armaduras IsostaticasWily Letona AmaroAún no hay calificaciones
- Facultad de Ciencias Veterinarias Y Pecuarias Escuela de Ciencias VeterinariasDocumento44 páginasFacultad de Ciencias Veterinarias Y Pecuarias Escuela de Ciencias VeterinariasCarlos DamiánAún no hay calificaciones
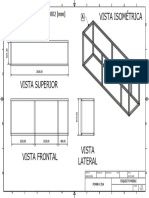
- Mueble ÁngulosDocumento1 páginaMueble ÁngulosCarlos DamiánAún no hay calificaciones
- Procesamiento Digital de ImágenesDocumento6 páginasProcesamiento Digital de ImágenesBreen Ramirez StrokesAún no hay calificaciones
- Mueble EsqueletoDocumento1 páginaMueble EsqueletoCarlos DamiánAún no hay calificaciones
- Integración 2 - Portafolio - Carlos Díaz PDFDocumento43 páginasIntegración 2 - Portafolio - Carlos Díaz PDFCarlos DamiánAún no hay calificaciones
- Integración 2 - Portafolio - Carlos Díaz PDFDocumento43 páginasIntegración 2 - Portafolio - Carlos Díaz PDFCarlos DamiánAún no hay calificaciones
- Laboratorio 3 ComunicacionesDocumento3 páginasLaboratorio 3 ComunicacionesCarlos DamiánAún no hay calificaciones
- Plan de MantenimientoDocumento4 páginasPlan de MantenimientoCarlos DamiánAún no hay calificaciones
- Tarea #2 - Sistemas de ControlDocumento6 páginasTarea #2 - Sistemas de ControlCarlos DamiánAún no hay calificaciones
- Unidad3 PDFDocumento45 páginasUnidad3 PDFCarlos DamiánAún no hay calificaciones
- Recursos Humanos ARAUCODocumento14 páginasRecursos Humanos ARAUCOCarlos DamiánAún no hay calificaciones
- 01 Mantenimiento IndustrialDocumento87 páginas01 Mantenimiento IndustrialAndres SaavedraAún no hay calificaciones
- Taller #2 - Conversión ElétricaDocumento7 páginasTaller #2 - Conversión ElétricaCarlos DamiánAún no hay calificaciones
- Informe Proyeto Final (2017)Documento6 páginasInforme Proyeto Final (2017)Carlos DamiánAún no hay calificaciones
- Tarea - N°1-SISTEMA DINÁMICODocumento15 páginasTarea - N°1-SISTEMA DINÁMICOCarlos DamiánAún no hay calificaciones
- Tarea - N°1-SISTEMA DINÁMICODocumento15 páginasTarea - N°1-SISTEMA DINÁMICOCarlos DamiánAún no hay calificaciones
- Pres Robotics Summer School 111214Documento43 páginasPres Robotics Summer School 111214Jose Neira CastilloAún no hay calificaciones
- Taller #2 - Conversión ElétricaDocumento7 páginasTaller #2 - Conversión ElétricaCarlos DamiánAún no hay calificaciones
- Informe Proyeto Final (2017)Documento6 páginasInforme Proyeto Final (2017)Carlos DamiánAún no hay calificaciones
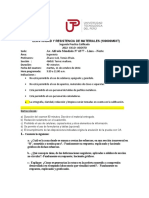
- Practica Calificada 2Documento4 páginasPractica Calificada 2adrianAún no hay calificaciones
- Ejercicios Campo GravitatorioDocumento47 páginasEjercicios Campo GravitatorioAnaMariAlbaAún no hay calificaciones
- Tarea 2 Wong VibracionesDocumento20 páginasTarea 2 Wong VibracionesAna WongAún no hay calificaciones
- Sesion 2 SismicaDocumento115 páginasSesion 2 SismicafranklinAún no hay calificaciones
- Elementos de Transporte y Transmisión MecánicaDocumento6 páginasElementos de Transporte y Transmisión MecánicaJazmin EscalanteAún no hay calificaciones
- Problema Campo Electrico Johnny OsorioDocumento6 páginasProblema Campo Electrico Johnny Osoriocarla1gutierrez-1Aún no hay calificaciones
- EXP1 - Caída LibreDocumento9 páginasEXP1 - Caída LibreALEJANDRO CERDA BARROSOAún no hay calificaciones
- Relación Termodinámica-EquilibrioDocumento27 páginasRelación Termodinámica-EquilibrioalessandroAún no hay calificaciones
- Termodinámica - para - Ingenieros - (PG - 194 202) PDFDocumento9 páginasTermodinámica - para - Ingenieros - (PG - 194 202) PDFadrian ospino canteroAún no hay calificaciones
- Interaccion Portico - MuroDocumento3 páginasInteraccion Portico - MuroSantiago CuellarAún no hay calificaciones
- Colision PlasticaDocumento6 páginasColision PlasticaRolando Aguilar SilvestreAún no hay calificaciones
- Diseño de Tornillos y Rueda DentadaDocumento10 páginasDiseño de Tornillos y Rueda DentadaRonald Bances GarciaAún no hay calificaciones
- 12 Cinemática de Un Cuerpo RígidoDocumento170 páginas12 Cinemática de Un Cuerpo RígidoJota CidAún no hay calificaciones
- Física-rusa-T11 (1) INGENIERIA2222222.. (1) MODIFICARDocumento16 páginasFísica-rusa-T11 (1) INGENIERIA2222222.. (1) MODIFICARRony Rosales MauricioAún no hay calificaciones
- Esfuerzo Cortante en SuelosDocumento30 páginasEsfuerzo Cortante en Suelosmeliza dominguezAún no hay calificaciones
- Segunda ParteDocumento47 páginasSegunda ParteElvis Wiliams Villavicencio VillarrealAún no hay calificaciones
- Práctica 5 TerminadaDocumento7 páginasPráctica 5 TerminadaAlejandro OlmedoAún no hay calificaciones
- Problemas de Movimiento en Dos Dimensiones (Proyectiles)Documento2 páginasProblemas de Movimiento en Dos Dimensiones (Proyectiles)Cindy MaroonAún no hay calificaciones
- Syllabus de Fenomenos de TransporteDocumento7 páginasSyllabus de Fenomenos de TransporteNash VélezAún no hay calificaciones
- Centro de Gravedad y Ecentro de Estabilidad en Edificios y EstructurasDocumento14 páginasCentro de Gravedad y Ecentro de Estabilidad en Edificios y EstructurasAnonymous stWK66w1T100% (1)
- Problemas CabreraDocumento6 páginasProblemas CabreraJuan Manuel Moscoso Ruiz0% (2)
- Sistema de Colada (Fundición)Documento45 páginasSistema de Colada (Fundición)Diego Beltrán100% (1)
- Capitulo v. Cinetica de Una Partícula. Trabajo - EnergiaDocumento57 páginasCapitulo v. Cinetica de Una Partícula. Trabajo - EnergiaPariapaza Cuarite DarwinAún no hay calificaciones
- 12 Ciclos PDFDocumento33 páginas12 Ciclos PDFpipotalamoAún no hay calificaciones
- Eval III U Dyna.Documento7 páginasEval III U Dyna.noraAún no hay calificaciones
- Boletin 2 23Documento1 páginaBoletin 2 23Samuel Abreu PradoAún no hay calificaciones