También podría gustarte
- Metodos de Pasos MultiplesDocumento8 páginasMetodos de Pasos MultiplesvictorAún no hay calificaciones
- AnalisisDocumento27 páginasAnalisisAlexander Rivera100% (1)
- Informe Neumatica 2Documento33 páginasInforme Neumatica 2IgnacioAntonioAún no hay calificaciones
- Diario de EmocionesDocumento7 páginasDiario de EmocionesgustavoAún no hay calificaciones
- 10 KV Insulation Tester Megger Mit1025 Ssei CIA. Ltda.Documento4 páginas10 KV Insulation Tester Megger Mit1025 Ssei CIA. Ltda.Diego GadvayAún no hay calificaciones
- Rehabiitación Visual de Saona, para Clase PDFDocumento25 páginasRehabiitación Visual de Saona, para Clase PDFAnonymous CkU0l8XQ100% (1)
- Aplicaciones Del Metodo de EulerDocumento14 páginasAplicaciones Del Metodo de EulerIrving Abadia Saez0% (1)
- TEMA # 1 - Parte 2Documento33 páginasTEMA # 1 - Parte 2Juan David100% (1)
- Principio de ExhauciónDocumento1 páginaPrincipio de Exhauciónjonathanandres95g100% (1)
- A Priori y A PosterioriDocumento4 páginasA Priori y A PosterioribryanAún no hay calificaciones
- Investigación de La Unidad 5, Métodos Numéricos (Método de Euler)Documento8 páginasInvestigación de La Unidad 5, Métodos Numéricos (Método de Euler)Jesús Alexander MejíazAún no hay calificaciones
- Runge - Kutta - Orden - 4 en Matlab y Su Aplicacion en Ecuaciones DiferencialesDocumento3 páginasRunge - Kutta - Orden - 4 en Matlab y Su Aplicacion en Ecuaciones DiferencialesAngie Rosseth Valencia SagobalAún no hay calificaciones
- Metodo de Euler y Isaac NewtonDocumento15 páginasMetodo de Euler y Isaac NewtonCristianAún no hay calificaciones
- Método Númerico de Runge KuttaDocumento5 páginasMétodo Númerico de Runge KuttaErandi GarcíaAún no hay calificaciones
- Unidad 6 Metodos NumericosDocumento11 páginasUnidad 6 Metodos NumericosChristopherTrujilloAún no hay calificaciones
- Método para Solución de Ecuaciones Diferenciales.Documento11 páginasMétodo para Solución de Ecuaciones Diferenciales.Fernando CauichAún no hay calificaciones
- Trabajo Final de Cálculos para Ingeniería de ProcesosDocumento22 páginasTrabajo Final de Cálculos para Ingeniería de ProcesosjesiAún no hay calificaciones
- Determinacion de IncognitaDocumento4 páginasDeterminacion de IncognitaMar BaVeAún no hay calificaciones
- Metodos Numericos para La Resolucion de Ecuaciones Diferenciales de Orden SuperiorDocumento31 páginasMetodos Numericos para La Resolucion de Ecuaciones Diferenciales de Orden SuperiorOliver Fernando Angel RuizAún no hay calificaciones
- INVESTIGACION Metodos ECUACIONES NOLINEALES POR P.JEFFERSON TUCUPIDocumento9 páginasINVESTIGACION Metodos ECUACIONES NOLINEALES POR P.JEFFERSON TUCUPITucupi jimmyAún no hay calificaciones
- Unidad 2 Metodos NumericosDocumento32 páginasUnidad 2 Metodos NumericosChristian HiramAún no hay calificaciones
- Tema 6 Solucionede Ecuaciones Diferenciales OrdinariasDocumento15 páginasTema 6 Solucionede Ecuaciones Diferenciales OrdinariasLuis Eduardo Bolaños AvendañoAún no hay calificaciones
- Unidad 2Documento10 páginasUnidad 2Brian CastilloAún no hay calificaciones
- Reporte Del Laboratorio 1Documento12 páginasReporte Del Laboratorio 1Yerko BecerraAún no hay calificaciones
- Unidad 6 MetodosDocumento42 páginasUnidad 6 MetodosFrancisco SotoAún no hay calificaciones
- Metodos Numericos de Solucion para Una Ecuacion DiferencialDocumento12 páginasMetodos Numericos de Solucion para Una Ecuacion DiferencialCarlos BecerrilAún no hay calificaciones
- Trabajo de Investigacion de Matematicas VDocumento13 páginasTrabajo de Investigacion de Matematicas VRolando GonzalezAún no hay calificaciones
- Método de NewtonDocumento13 páginasMétodo de NewtonKitman Achahui MartinezAún no hay calificaciones
- Unidad 6 Métodos NuméricosDocumento15 páginasUnidad 6 Métodos NuméricosJose Ernesto Castro ChavezAún no hay calificaciones
- Informe Método Númerico de HalleyDocumento20 páginasInforme Método Númerico de HalleyGabriel Mamani CallisayaAún no hay calificaciones
- Manual de PracticasDocumento34 páginasManual de PracticasDavid Josue DamianAún no hay calificaciones
- Investigacion de Metodo de NewtonDocumento8 páginasInvestigacion de Metodo de NewtonJhoselyn Nikol Jimenez AcevedoAún no hay calificaciones
- Unidad 4Documento27 páginasUnidad 4K Michell LopezAún no hay calificaciones
- Parte2 SegundaSemanaMetNumFIEEDocumento35 páginasParte2 SegundaSemanaMetNumFIEESTEFANO GIORDANO MARTORELLI RIOSAún no hay calificaciones
- Unidad 6 Métodos NuméricosDocumento16 páginasUnidad 6 Métodos NuméricosJose Ernesto Castro ChavezAún no hay calificaciones
- Analisis Numerico TrabajoDocumento21 páginasAnalisis Numerico TrabajoJuan M. SoubranAún no hay calificaciones
- 190B0881 Flora RosasDocumento9 páginas190B0881 Flora RosasPedro RománAún no hay calificaciones
- Investigacion 2.5 y 2.6 Metodos NumericosDocumento5 páginasInvestigacion 2.5 y 2.6 Metodos NumericosAlejandro PatiñoAún no hay calificaciones
- Investigacion Ec - Nolineales Por P.jefferson TucupiDocumento9 páginasInvestigacion Ec - Nolineales Por P.jefferson TucupiTucupi jimmyAún no hay calificaciones
- Metodo de Runge KuttaDocumento8 páginasMetodo de Runge KuttaN C AAún no hay calificaciones
- 14 - Tarea No. 3 PDFDocumento40 páginas14 - Tarea No. 3 PDFDiego GarnicaAún no hay calificaciones
- Euleryrungekutta 160621133052Documento26 páginasEuleryrungekutta 160621133052Christiaan ZayedAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias Metodos NumericosDocumento21 páginasEcuaciones Diferenciales Ordinarias Metodos NumericosTimo Salas CambranoAún no hay calificaciones
- Tarea Analisis 3Documento7 páginasTarea Analisis 3Juan Fernando Cerrato CastellonAún no hay calificaciones
- T2-02 Investigacion Fabio TottiDocumento8 páginasT2-02 Investigacion Fabio TottiTotti CruzAún no hay calificaciones
- Investigacion Unidad 6, Cristian Rodriguez VDocumento8 páginasInvestigacion Unidad 6, Cristian Rodriguez VDiego Alberto Pérez MartínezAún no hay calificaciones
- Proyecto Metodos NumericosDocumento27 páginasProyecto Metodos NumericosRafa MaldonadoAún no hay calificaciones
- Texto OK Tests y Pretests Ingeniería 24 NovDocumento93 páginasTexto OK Tests y Pretests Ingeniería 24 Novisla_adAún no hay calificaciones
- Practica de Metodos NumericosDocumento29 páginasPractica de Metodos NumericosAlbert LazoAún no hay calificaciones
- Avance en Clases 2Documento131 páginasAvance en Clases 2axlhellfish666Aún no hay calificaciones
- Calculo Numerico Victor OjedaDocumento20 páginasCalculo Numerico Victor OjedaVictor OjedaAún no hay calificaciones
- Trabajo Sobre El Método de Euler.Documento11 páginasTrabajo Sobre El Método de Euler.Henry Gustavo Chaves GutiérrezAún no hay calificaciones
- Métodos para La Solución de Ecuaciones LinealesDocumento11 páginasMétodos para La Solución de Ecuaciones LinealesTomas Casiano ArielAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias ListoDocumento11 páginasEcuaciones Diferenciales Ordinarias ListoBarry Daniel Duran RojasAún no hay calificaciones
- Trabajo 1 Analisis Numerico.Documento5 páginasTrabajo 1 Analisis Numerico.endergonzalezvaleraAún no hay calificaciones
- Aplicacion de Las DerivadasDocumento13 páginasAplicacion de Las DerivadasRobert RojasAún no hay calificaciones
- Metodos Numericos - DiapositivasDocumento60 páginasMetodos Numericos - DiapositivasMelissa SuárezAún no hay calificaciones
- Trabjo Encargado Metodo de Runge KuttaDocumento16 páginasTrabjo Encargado Metodo de Runge KuttaYalile Benite GarciaAún no hay calificaciones
- Catedra Metodos Numericos Unsch 04Documento72 páginasCatedra Metodos Numericos Unsch 04davidsson070% (1)
- Bautista Gutiérrez Uziel Met Num Act Tem VI 9 - 10Documento33 páginasBautista Gutiérrez Uziel Met Num Act Tem VI 9 - 10Chucky LozanoAún no hay calificaciones
- Unidad 6 Metodos NumericosDocumento29 páginasUnidad 6 Metodos NumericosOziel OrtegaAún no hay calificaciones
- Bautista Gutiérrez Uziel Met Num Act Tem VI 9 - 10Documento34 páginasBautista Gutiérrez Uziel Met Num Act Tem VI 9 - 10Chucky LozanoAún no hay calificaciones
- Calculo 13Documento4 páginasCalculo 13isaacAún no hay calificaciones
- Hashing geométrico: Algoritmos eficientes para el reconocimiento y la comparación de imágenesDe EverandHashing geométrico: Algoritmos eficientes para el reconocimiento y la comparación de imágenesAún no hay calificaciones
- Codigos AlamoutiDocumento2 páginasCodigos Alamoutijonathanandres95gAún no hay calificaciones
- ForodatosDocumento2 páginasForodatosjonathanandres95gAún no hay calificaciones
- Silabo Electromag 1Documento5 páginasSilabo Electromag 1jonathanandres95gAún no hay calificaciones
- CalcDocumento87 páginasCalcjonathanandres95gAún no hay calificaciones
- Sensor de Regulador de TemperaturaDocumento10 páginasSensor de Regulador de TemperaturaEdwin Quiete FloresAún no hay calificaciones
- Cesto de Los TesorosDocumento3 páginasCesto de Los TesorosAdriana L. Baena EspinoAún no hay calificaciones
- La Estación Total y Tipos de Levantamientos TopográficosDocumento9 páginasLa Estación Total y Tipos de Levantamientos TopográficosLuis Sanchez NievezAún no hay calificaciones
- AleacionesDocumento3 páginasAleacionesHéberSantibáñezQuirozAún no hay calificaciones
- Acero SISA MET T15 de Metalurgia en Polvo PMDocumento2 páginasAcero SISA MET T15 de Metalurgia en Polvo PMIvann SanMenAún no hay calificaciones
- Tipos de Vientos Según El AlcanceDocumento3 páginasTipos de Vientos Según El AlcanceFrank Luque Alcarraz100% (1)
- Ovalle I PDFDocumento54 páginasOvalle I PDFJazmín TortellaAún no hay calificaciones
- Tablas de Vapor de Agua Actualizadas PDFDocumento50 páginasTablas de Vapor de Agua Actualizadas PDFPedro Bello SaenkoAún no hay calificaciones
- FT Bitu PrimerDocumento2 páginasFT Bitu PrimerCésar Augusto Cervera BorjaAún no hay calificaciones
- P.1 ElectrometalurgiaDocumento10 páginasP.1 ElectrometalurgiaSebastianLQ100% (1)
- Medidas de DispersiónDocumento10 páginasMedidas de DispersiónSandra soto50% (2)
- La Articulacion Como Estrategia ProyectualDocumento13 páginasLa Articulacion Como Estrategia ProyectualNicolas Felipe QuinteroAún no hay calificaciones
- Lab 3Documento3 páginasLab 3Mauricio AndresAún no hay calificaciones
- Parcial 3 MecfluidosDocumento3 páginasParcial 3 MecfluidosSibelys Saray Ortiz JimenezAún no hay calificaciones
- Programa LuminotecniaDocumento9 páginasPrograma Luminotecniafrancisestebansamuel3Aún no hay calificaciones
- Avance CalculosDocumento16 páginasAvance CalculosAlonzo PerezAún no hay calificaciones
- Informe Técnico Poder JudicialDocumento40 páginasInforme Técnico Poder JudicialMelissa MéndezAún no hay calificaciones
- Práctica 7 LFDocumento5 páginasPráctica 7 LFDaniel0% (1)
- Informe 2 Textura Del SueloDocumento8 páginasInforme 2 Textura Del SueloJhoel Jrry Huayna OnarresAún no hay calificaciones
- Por Qué Se Utiliza Corriente TrifásicaDocumento3 páginasPor Qué Se Utiliza Corriente TrifásicaYuri Yissel Lejabo FloresAún no hay calificaciones
- Articulador Gnatus jp30 PDFDocumento48 páginasArticulador Gnatus jp30 PDFDaniel Zabala0% (1)
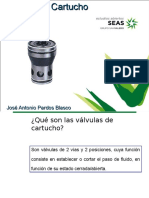
- Tema 7 - Valvulas de CartuchoDocumento38 páginasTema 7 - Valvulas de CartuchoLeoAún no hay calificaciones
- COMPACTACIONDocumento3 páginasCOMPACTACIONLiliana Quispe CardenasAún no hay calificaciones
- Crucigrama ResultoDocumento3 páginasCrucigrama ResultoDanelly Martinez GutierrezAún no hay calificaciones