Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Reguladores Automaticos de Potencia
Cargado por
Eduardo DavidDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Reguladores Automaticos de Potencia
Cargado por
Eduardo DavidCopyright:
Formatos disponibles
Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
Departamento de Automática
IE – 431 Sistemas de Control
MONOGRAFIA
Reguladores automáticos de voltaje en conjunto con
estabilizadores de sistemas de potencia (AVR + PSS)
GRUPO: 14
INTEGRANTES: David A. Bonilla
Luis A. Castro
Walter A. Montero
PERIODO: I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) i
TABLA DE CONTENIDO
RESUMEN ........................................................................................................... 1
1.0 Introducción .................................................................................................. 3
2.0 Reguladores Automáticos de Voltaje y Estabilizadores de sistemas de
potencia................................................................................................................. 4
2.1 Estabilidad del sistema.......................................................................................................... 4
2.2 Máquinas sincrónicas............................................................................................................ 4
2.2.1 Ecuaciones mecánicas.................................................................................................... 4
2.2.2 Ecuaciones eléctricas ..................................................................................................... 6
2.2.3 Ecuaciones de estado estacionario ................................................................................. 6
2.2.4 Ecuaciones de estado transiente..................................................................................... 8
2.2.5 Ecuaciones en estado subtransiente ............................................................................... 9
2.2.6 Modelo de las máquinas............................................................................................... 10
2.3 Controladores automáticos de máquinas sincrónicas ......................................................... 12
2.3.1 Reguladores automáticos de voltaje............................................................................. 12
2.3.2 Tipos disponibles de equipos de control primarios...................................................... 15
2.3.3 Controladores primarios rápidos y continuos. ............................................................. 16
2.3.4 Sintonización de un regulador de voltaje..................................................................... 16
2.3.5 Efecto de un regulador de voltaje. ............................................................................... 19
2.3.6 Estabilizador de sistemas de potencia PSS. ................................................................. 21
3.0 Estabilidad transitoria global y regulación de voltaje ........................... 23
3.1 La importancia del control global ....................................................................................... 23
3.2 Controladores existentes y sus problemas .......................................................................... 24
3.2.1 DFL Controlador No-lineal.......................................................................................... 24
3.2.2 Regulador de voltaje .................................................................................................... 26
3.2.3 Control coordinado a través de conmutación............................................................... 27
3.2.4 Simulaciones de controladores locales (AVR y PSS)................................................. 28
3.3 Control Global en Sistemas de Potencia............................................................................. 32
3.3.1 La función asociativa y la región de operación del sistema......................................... 32
3.3.2 Control Global ............................................................................................................. 34
3.3.3 Discusión del Control Global....................................................................................... 35
3.3.4 Simulación ................................................................................................................... 37
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) ii
4.0 AVR Digitales y PSS .................................................................................... 41
4.1 CD-AVR (Compact Digital Automatic Voltage Regulator) y PSS (Power System
Stabilizer).................................................................................................................................. 41
4.2 PSS...................................................................................................................................... 43
4.2.1 PSS de entradas múltiples:........................................................................................... 43
4.0 Conclusiones ................................................................................................ 45
5.0 Bibliografía ................................................................................................... 46
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 1
RESUMEN
Este documento desarrolla el tema de los reguladores automáticos
de voltaje en conjunto con los estabilizadores de sistemas de
potencia. Se inicia con una explicación del modelado matemático
de una máquina sincrónica, la cual se analiza desde el punto de
vista mecánico y eléctrico para obtener las ecuaciones y a partir de
éstas desarrollar los distintos lazos de control.
Seguidamente se continúa con la presentación de los sistemas de
control utilizados para regular un generador. Se inicia el análisis
con el diagrama de bloques del generador y su modelo matemático.
El principal problema de los reguladores de voltaje es la velocidad
en que el voltaje retorne a su valor eficaz luego de una
perturbación.
Se utiliza un regulador de voltaje de primer orden para observar su
efecto en el sistema del generador comparando sus diagramas de
bloques. La siguiente sección realiza un examen más
exhaustivo de los controladores utilizados (el AVR y el PSS ó
DFL) en los sistemas de potencia. Se retoman sus modelos y se
analiza su comportamiento, así como sus ventajas y desventajas en
la aplicación práctica. Se discute su aplicación de manera más
moderna a través del uso de ambos controladores en un esquema
de conmutación entre ambos. Inicialmente se analiza el
comportamiento cuando se definen tiempos de forma anticipada de
acuerdo a las distintas fallas probables en el sistema. Se analiza la
respuesta del sistema a las distintas perturbaciones para determinar
su validez.
Posteriormente se introduce un nuevo esquema de control llamado
control global. El control global pretende aprovechar las
características fundamentales del estabilizador y el regulador de
voltaje conmutando dependiendo del punto de operación en el que
se encuentre la falla (transitoria o post-transitoria). Se introduce
para esta aplicación una función que asocia el punto de operación
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 2
de manera dinámica y determina que controlador se debe utilizar
para estabilizar al sistema de manera rápida y convergiendo al
valor de voltaje deseado. El método se ilustra mediante
simulaciones que permiten observar la respuesta de estos
controladores a distintas fallas en el sistema de potencia. Luego se
compara la respuesta que ofrecen ambos esquemas de control a las
perturbaciones en los sistemas de potencia.
Se menciona también un tipo específico de regulador, el CD-AVR,
que es un regulador de voltaje automático compacto digital que
utiliza tecnología de 32 bits. Además de distintas técnicas que se
utilizan para desarrollar PSS, como el PSS de entradas múltiples.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 3
1.0 Introducción
Una de las aplicaciones más importantes de los controladores en los sistemas eléctricos es
el uso que se les puede dar a estos para conservar la estabilidad posterior a una falla o a una
perturbación en alguna de sus partes. Aunque la estabilidad de estos sistemas puede definirse
ampliamente, un problema importante que se encuentra normalmente es la estabilidad transitoria.
El problema principal radica en mantener el sincronismo entre generadores luego de una falla
severa. A través del control de la excitación en cualquier unidad de generación puede
solucionarse este tipo de problemas. Otro apartado importante en el control de los sistemas de
potencia es mantener un voltaje estable bajo operación normal y bajo el efecto de perturbaciones,
referido aquí como el problema de la regulación de voltaje.
El presente trabajo pretende primeramente entender los modelos matemáticos capaces de
simular el comportamiento de los generadores, por medio del modelado de la máquina
sincrónica, que suministran potencia a los sistemas de potencia. Una vez que se ha establecido
una base sólida para su estudio y análisis, el siguiente punto importante es entender las distintas
herramientas disponibles que hacen posible que estos sistemas se mantengan estables cerca del
valor deseado. Se introduce para esto los controladores conocidos como reguladores de voltaje
automáticos (AVR) y estabilizadores de sistemas de potencia (PSS). A través del estudio de
estos controladores es posible comprender el efecto que tienen en la respuesta de los sistemas de
potencia. Para lograr la comprensión de este tipo de controladores se procede a estudiar sus
correspondientes diagramas de bloques y el efecto en las distintas variables de la máquina
sincrónica, a saber el ángulo de potencia (o variable fundamental de la máquina), el torque y el
voltaje de salida.
Por otra parte, se consideró importante analizar un problema más práctico en donde se
observe el comportamiento de este tipo de controladores a algún tipo de falla o perturbación en el
sistema. Este tipo de fallas como variaciones de la carga y sobrevoltajes son problemas
frecuentes que se presentan en las redes donde se instale una máquina sincrónica. Es por eso que
es de suma importancia mantener el voltaje y la potencia entregada por el sistema constante en su
valor nominal como un índice del desempeño real de la red.
En la última sección se dará una comparación entre el AVR digital utilizado como único
elemento de regulación y el AVR en conjunto con un PSS; el último caso de estudio es el
anterior con múltiples entradas.[1]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 4
2.0 Reguladores automáticos de voltaje y estabilizadores de
sistemas de potencia.
2.1 Estabilidad del sistema
El concepto de la estabilidad de un sistema ha sido utilizado para indicar la permanencia
en sincronía de los componentes rotacionales de un sistema de potencia debido a los cambios de
condiciones en la carga y a las perturbaciones propias o externas al sistema.
Todos los sistemas poseen variables de sistema que de alguna manera están relacionadas
con las constantes de tiempo. Estas variables pueden ser modeladas a partir de un sistema de
ecuaciones diferenciales que determinará la respuesta a cualquier cambio en el funcionamiento
del sistema. Para detectar estos cambios, las variables del sistema requieren de tiempo, a partir
del cual logran responder a estas diferencias de operación.
Los modelos matemáticos establecidos a través del conjunto de ecuaciones usualmente
son poco prácticos si no se realizan ciertas consideraciones que simplifiquen los modelos
creados. Es importante destacar que no existe un único modelo perfecto que cumpla con los
requisitos de todos los sistemas, sino que más bien el diseñador busca crear soluciones
específicas para cada caso.
Una dificultad que se presenta es la presencia de grandes cambios en las constantes de
tiempo relacionadas con las variables del sistema. Considerando únicamente máquinas
sincrónicas, se encuentra que el mayor problema para la estabilidad lo presenta la vibración
rotor. Existen algunas variables que pueden despreciarse, ya que estas son pequeñas o no afectan
la exactitud del modelo, dentro de tales encontramos por ejemplo las variables de red o las
constantes de tiempo del estator, y así se consideran únicamente las variables relevantes para
luego convertirlas en ecuaciones algebraicas.
La falta de cambios significativos o la permanencia del sistema sin perturbaciones por
largos períodos de tiempo, permiten transformar a las variables en constantes.
2.2 Máquinas sincrónicas
2.2.1 Ecuaciones mecánicas
El sistema de coordenadas de referencia del siguiente modelo estará dado a partir de un
marco de referencia rotacional, el cual gira según el movimiento y la misma velocidad del rotor,
logrando así una independencia de los coeficientes de las ecuaciones del tiempo. El eje principal
de este marco de referencia es el eje directo o eje d. Existe también un eje llamado de cuadratura
o eje q que se encuentra rotado 90° con respecto al primero.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 5
Las ecuaciones mecánicas contemplan tres consideraciones muy importantes para el
desarrollo de éstas:
1. La velocidad del rotor es muy cercana a la velocidad sincrónica.
2. Las pérdidas de potencia rotacional debido a fricción y ventilación son desestimadas.
3. La potencia mecánica del eje es tal, que permite cambios suaves cuando se aumenta o
disminuye la velocidad.
A partir de estas suposiciones se pueden igualar la potencia por unidad y el torque por
unidad, se puede establecer también que la potencia de aceleración de la máquina (Pa) es la
diferencia entre la potencia del eje (Pm) y la potencia eléctrica (Pe). Se sabe que la aceleración
es la segunda derivada del ángulo y más precisamente en este caso tenemos:
d 2δ Pa Pm − Pe
α= 2 = = (1)
dt Mg Mg
donde Mg es el momento angular.
El momento angular se define como
Hg
Mg = (2)
π * f0
donde Hg es la constante de inercia y fo es la frecuencia base del sistema.
Las corrientes de Eddy son también considerables, ya que producen un torque contrario al
movimiento del rotor, generando así una reducción entre las velocidades reales que alcanza esta
pieza y la velocidad sincrónica. Esta fuerza se puede considerar como potencia de desaceleración
y se modelará de la siguiente manera:
d 2δ 1 dδ
2
= Pm − Pe − Da (3)
dt Mg dt
donde Da es el coeficiente de amortiguamiento. De esta manera se puede describir el
movimiento mecánico de la máquina sincrónica con las siguientes ecuaciones:
pω =
1
(Pm − Pe − Da(ω − 2πf 0 )) (4)
Mg
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 6
pδ = ω − 2πf 0 (5)
2.2.2 Ecuaciones eléctricas
Los supuestos tomados en cuenta a la hora de crear el modelo eléctrico están dados
seguidamente:
1. La velocidad del rotor estará lo suficientemente cerca de 1.0 por unidad, de tal forma que
se pueda considerar una constante.
2. Todas las inductancias son independientes de la corriente.
3. Las inductancias de los devanados son representadas como constantes más los
harmónicos sinusoidales del ángulo de rotor.
4. Los devanados distribuidos son representados como devanados concentrados.
5. La máquina será representada como un voltaje detrás de una impedancia.
6. No hay pérdidas por histéresis en el hierro y las corrientes de Eddy son tomadas en
cuenta únicamente por devanados equivalentes en el rotor.
7. Las pérdidas de reactancia sólo existen en el rotor.
A partir de estas consideraciones físicas se pueden crear modelos de máquinas
sincrónicas en estado estable, transiente y subtransiente.
2.2.3 Ecuaciones de estado estacionario
Dentro de estas ecuaciones no consideraremos los efectos de saturación y tomaremos el
flujo (Ff) como proporcional a la corriente de campo (If) y al voltaje de campo aplicados, el cual
actúa sobre el eje de la máquina. El voltaje de estator (Ei ó Ef) de terminal de circuito abierto es
proporcional al flujo pero es perpendicular a éste último ya que está sobre el eje de cuadratura.
Al cargarse la máquina sincrónica, se genera un flujo proporcional (F) y en fase con la
corriente del estator (I), el cual al ser sumado vectorialmente con el flujo de campo, da como
resultado el flujo efectivo Fe en el sistema. El voltaje efectivo interno del estator (El) es causado
por el flujo efectivo. El voltaje terminal (V) se encuentra a partir del voltaje efectivo del estator
considerando las caídas de voltaje debido a las pérdidas de reactancia (Xl) y la resistencia de
armadura (Ra). Por el concepto de triángulos similares la diferencia de El y Ef se encuentra en
fase con la caída de voltaje, dado por I*Xl, y es proporcional a I. Esta diferencia puede ser vista
como la caída de tensión a través de la reactancia de armadura Xa. La suma de ambas reactancias
es llamada reactancia sincrónica.
Para máquinas sincrónicas de polo saliente, el diagrama de favores es más complicado.
Considerando el rotor como simétrico con respecto a los ejes directo y de cuadratura se tiene que
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 7
el flujo Fd será proporcional a Id y que Fq será proporcional a Iq, sin embargo el flujo total de
reacción de armadura no será proporcional o estará en fase con la corriente I. Como fue
considerado anteriormente se da que la proporcionalidad entre Id y Fd es igual a uno, mientras
que la proporcionalidad entre Iq y Fq es menor a uno.
Figura 1. Diagrama fasorial del rotor cilíndrico de una máquina sincrónica en estado
estacionario. [1]
Note que en la figura 1 las reactancias de armadura de los ejes d y q han sido
desarrollados como en el caso del rotor cilíndrico, y se obtiene así que:
X d = Xl + Xad (6)
X q = Xl + Xaq (7)
Ei − Vq = RaI q − X d I d (8)
− Vd = RaI d − X q I q (9)
donde Vd y Vq son las componentes axiales del voltaje terminal V.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 8
Figura 2 Diagrama fasorial de un rotor de polos salientes de una máquina sincrónica en estado
estacionario. [1]
2.2.4 Ecuaciones de estado transiente
El modelo anterior no se ajusta a cambios rápidos en las condiciones externas a la
máquina sincrónica. La inercia presente en el sistema, causada por los acoples de flujo, no
permite que la respuesta del sistema sea inmediata, lo que deriva en la creación de voltajes
ficticios para representar los acoples de flujo de los devanados de rotor. Estos nuevos voltajes se
denominarán E’d y E’q y aparecen en conjunto con las reactancias en transiente X’d y X’q.
Se puede entonces establecer:
E 'd −Vq = RaI q − X 'd I d (10)
E 'q −Vd = RaI d − X 'q I q (11)
El voltaje Ei se debe considerar como la suma vectorial de Ed y Eq y éste será el voltaje
relativo a la reactancia sincrónica. Para el caso de estado estacionario, se tenía que Ed=0 y
Eq=Ei. Se da también la posibilidad de que los acoples de flujo cambien en el tiempo, generando
así las siguientes ecuaciones diferenciales:
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 9
pE 'q =
(Ef − E ) = (Ef + ( X '
q d − X 'd )I d − E ' q )
(12)
T 'd 0 T 'd 0
− Ed (− (X q − X 'q )I q − E 'd )
pE 'd = = (13)
T 'q 0 T 'q 0
Figura 3. Diagrama fasorial de una máquina sincrónica en estado transiente. [1]
2.2.5 Ecuaciones en estado subtransiente
En el rotor existen otros circuitos como en el caso de devanados de amortiguamiento.
Estos circuitos se toman en cuenta únicamente en casos en que se requiera de mayor exactitud.
Las reactancias y las constantes de tiempo son pequeñas, por lo que son despreciables. De esta
manera se desarrollan las siguientes nuevas ecuaciones:
E ' 'q −Vq = RaI q − X ' 'd I d (14)
E ' 'd −Vd = RaI d − X ' 'q I q (15)
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 10
pE ' 'q =
(E ' +( X '
q d − X ' 'd )I d − E ' 'q )
(16)
T ' 'd 0
pE ' 'd =
(E ' +(X ' − X ' ' )I
d q q q − E ' 'd )
(17)
T ' 'q 0
Las ecuaciones anteriores han sido desarrolladas considerando que las constantes de
tiempo transientes son mayores que las de tiempo subtransiente. Un diagrama de favores es
mostrado en la figura 4. Es importante notar que las primeras 2 ecuaciones del estado transiente
son verdaderas únicamente en modo estacionario, aunque cuando caen los efectos subtransientes,
el error se hace cada vez más pequeño.
Figura 4. Diagrama fasorial de una máquina sincrónica en estado subtransiente. [1]
2.2.6 Modelo de las máquinas
El utilizar modelos más allá del estado subtransiente es una práctica poco común para un
modelo de varios sistemas. El utilizar modelos más complicados no necesariamente brindan más
o mejor información sobre el sistema, sino que por experiencia se ha llegado a concluir que los
mejores resultados se obtienen cuando las constantes de tiempo son modificadas adecuadamente.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 11
La mejor forma de modelar un sistema, en este caso específico la máquina sincrónica de
diferentes grados de complejidad, es planteando la cantidad máxima de ecuaciones y
determinarlo a partir de la información que se tiene.
Existen 5 modelos para un motor con rotor de 4 devanados:
1. Modelo 1: Magnitud de voltaje constante que no requiere de modelos con ecuaciones
diferenciales sino únicamente ecuaciones algebraicas,
2. Modelo 2: Efectos en estado transiente en el eje d requieren de una ecuación diferencial
para su modelo. Se utilizan las expresiones expuestas en el apartado de estado transiente
relacionadas con dicho eje.
3. Modelo 3: Ser requieren de dos ecuaciones diferenciales para modelar los efectos de
estado transiente. Las ecuaciones son las presentadas en dicho apartado para los ejes d y
q.
4. Modelo 4: Se presentan efectos de estado subtransiente en los ejes d y q, los cuales
requieren de 3 ecuaciones diferenciales las cuales son la penúltima de estado transiente
así como las 3 primeras del estado subtransiente. Además se utiliza la siguiente
ecuación según se tengan los datos:
− (X q − X ' 'q )I q − E ' 'd
pE ' 'd = (18)
T ' 'q 0
la cual es una variación de la última ecuación de estado transiente.
5. Modelo 5: Se requieren 4 ecuaciones diferenciales para modelar los efectos de estado
subtransiente en los ejes d y q. Se utilizan las últimas ecuaciones de estado transiente así
como todas las ecuaciones de estado subtransiente.
Las ecuaciones de velocidad angular y ángulo expuestas en el apartado de ecuaciones
mecánicas también se deben utilizar en el modelado de los sistemas antes expuestos.
Existe también un sexto modelo, el cual puede llegar a simplificar grandemente un
sistema rígido, presentándolo como una máquina del tipo del modelo 1 en la que las ecuaciones
mecánicas no son necesarias; este modelo se define como:
Modelo 0: Voltaje infinito de máquina constante referido a reactancia de estado transiente en el
eje d. Se utilizan solamente las primeras dos ecuaciones del apartado de estado transiente.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 12
2.3 Controladores automáticos de máquinas sincrónicas
Para modelar sistemas de potencia dinámicos con duraciones de un segundo o mayores,
es necesario agregar los efectos de los controladores que causan perturbaciones en el sistema.
Los principales controladores utilizados para generadores son el AVR (regulador
automático de voltaje) y los controladores de velocidad. El primer dispositivo se compone de un
sistema de sensores de voltaje, comparadores y amplificadores que controlan una máquina
sincrónica que puede ser utilizada como generador o motor. El segundo dispositivo se compone
de casi los mismos elementos tomando en cuenta la turbina.
2.3.1 Reguladores automáticos de voltaje
Existen muchos modelos que han sido desarrollados para representar varios tipos de AVR
utilizados en un sistema de potencia. La mejor opción es utilizar un modelo de uso general
basado en la máquina sincrónica, en vez de tomar como base un modelo más complicado de uso
específico, el cual puede ser modificado efectivamente a partir de la información que se posea de
éste. Dos de los principales modelos establecidos por la IEEE se muestran a continuación:
Figura 5. Diagrama de bloques para dos modelos de AVR comúnmente usados (a) Modelo Tipo
1 de AVR de IEEE; (b) Modelo Tipo 2 de AVR de IEEE [1]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 13
A partir de estos dos modelos se pueden elaborar otros tipos de modelos como el
mostrado en la siguiente figura, el cual incluye una señal secundaria, la cual puede ser tomada de
cualquier fuente, pero que usualmente es tomada a partir de la desviación de la velocidad del
rotor de la velocidad sincrónica o la tasa de cambio de la potencia de salida de la máquina. Este
modelo ha demostrado cumplir satisfactoriamente con las demandas estudiadas hasta ahora.
Figura 6. Diagrama de bloques de un modelo compuesto de AVR. [1]
En muchos otros casos se ha encontrado que la información sobre modelos de AVR es
poca. A partir de esto se tiene que los modelos compuestos se convierten en modelos muy
sencillos al convertir las constantes de tiempo en cero y poner valores de ganancia tales como
cero, uno o infinito dependiendo de su posición.
Para el modelo anterior de AVR tenemos las siguientes ecuaciones:
pVfl =
(Vt − Vfl ) (19)
Tr
pVa =
(Ka (1 + Tb ⋅ p )Vh − Va ) (20)
Ta
donde
pVa ≤ Dmax (21)
Vamax ≥ Va ≥ Vamin (22)
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 14
pEf =
(Va − Ve − KeEf ) (23)
Te
pVd =
(Kf * pVg − Vd ) (24)
Tf
pVfb =
(Vd − Vfb ) (25)
Td
pVx =
(KxVaux − Vx ) (26)
Tx
pVo =
((1 + Ty ⋅ p )Vx − Vo ) (27)
Tz
Vh = Vs − Vfb − Vfl + Vo (28)
Ve = SeEf (29)
donde
Se = f (Ef ) (30)
Vg = Ef (31)
Excepto para el caso 2 donde
Vg = Va (32)
Va es una señal predefinida.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 15
La IEEE recomienda que Se se especifique con el voltaje a campo máximo (Semax) y a
0.75 del Semax. De esta manera se puede utilizar interpolación para determinar dicha constante a
cualquier valor de campo. Si se utiliza este método tenemos que utilizar la siguiente ecuación en
vez de la expuesta en la ec.29:
Ve = (k1 ⋅ Ef − k2 )Ef (33)
4Se 0.75 max
donde k1 = , K 2 = 0 si Ef ≤ 0.75 Ef max
3Ef max
4(Se max − Se 0.75 max )
k1 =
o Ef max , k 2 = 4Se 0.75 max − 3Se max si Ef > 0.75 Ef max
2.3.2 Tipos disponibles de equipos de control primarios.
Los tipos más representativos de controladores primarios de primera categoría son
controladores y excitadores. Estos son instalados como una parte integral de cada unidad
generadora. Últimamente, los sistemas estabilizadores de potencia (PSS – Power Systems
Stabilizers –) son agregados a los AVR como un control suplementario. La función de estos
aparatos es de regular la frecuencia y el voltaje terminal local en cada nivel del generador, como
respuesta a perturbaciones de los valores establecidos para estas variables. Los sistemas de
control primarios regulan las perturbaciones de la generación de potencia real (y reactiva)
enviada al sistema dentro de sus valores programados.
Se asume que bajo condiciones de operación normales, las perturbaciones de los valores
programados de las condiciones del sistema son como resultado de cambios pequeños
inesperados en la demanda. Estas perturbaciones tienen componentes muy rápidas y aleatorias en
potencia real PLi(t), y de potencia reactiva QLi(t), en todos los buses de carga. Así como una
componente más lenta PLi(τ) y QLi(τ), también en todos los buses de carga. Si la amplitud de
estas desviaciones es pequeña en relación con la carga programada, los modelos de sistemas
linealizados son suficientemente precisos para representar la respuesta de un sistema a estas
perturbaciones.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 16
2.3.3 Controladores primarios rápidos y continuos.
Considérese un sistema que consiste de un generador y dos cargas. El generador esta
equipado con una turbina-controlador y necesita un excitador o un regulador automático de
voltaje (se supondrá el AVR) para regular la frecuencia del generador y el voltaje del regulador
Et1 en respuesta a perturbaciones d(t) = [PL(t) QL(t)] y d(τ) = [PL(τ) QL(τ)]. El controlador
típicamente esta diseñado para suprimir perturbaciones en PL(τ), y el regulador de voltaje esta
diseñado para responder a fluctuaciones rápidas en d(t). Las perturbaciones en QL(τ) son
generalmente regulados por compensación reactiva de tipo mecánica en la carga o en las líneas
de transmisión.
2.3.4 Sintonización de un regulador de voltaje.
Se considera un modelo linealizado del sistema. El problema básico del control es diseñar
una realimentación tal que el voltaje de salida sea rápidamente regulado a su valor programado, a
pesar de las perturbaciones del sistema.
Un diagrama de bloques de un modelo linealizado con una pequeña perturbación de un
generador se muestra en la figura 7. Los coeficientes en este diagrama de bloques son definidos
como:
∂Te
K1 = (34)
∂δ
∂Te
K2 = (35)
∂e' q
K 3 = x' d + x e / x d + x e (36)
∂e' e
K 4 = (1 K 3 ) (37)
∂δ
∂Et
K5 = (38)
∂e' q
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 17
∂Et
K6 = (39)
∂e' q
Los coeficientes K1 y K2 representan la sensitividad del torque eléctrico con respecto al
ángulo de rotor y al flujo de dispersión, respectivamente. K3 es el factor de impedancia, bajo la
suposición que las perdidas resistivas son despreciadas. K4 representa la sensitividad del flujo de
dispersión con respecto al cambio en el ángulo del rotor, y K5 y K6 representan la sensibilidad
del voltaje final con respecto al ángulo rotórico y al cambio del flujo de dispersión.
Utilizando el diagrama de bloques mostrado en la figura anterior se puede analizar varios
efectos dinámicos particulares en la dinámica de lazo cerrado. El mas simple de todos seria
considera K2 a K6 igual a cero. El diagrama de bloques en este caso toma la forma de la figura 8.
Figura 7. Diagrama de bloques correspondiente a un modelo linealizado de un generador
conectado a un bus infinito. [4]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 18
Figura 8. Diagrama de boques representativo del lazo torque-velocidad. [4]
La dinámica del sistema en este caso esta mostrada por la ecuación
d 2δ dδ
J 2
+D + K1δ = 0 (40)
dt dt
Donde δ es el ángulo de potencia del generador en Rad.
Generalmente en la mayoría de los casos K1 es positivo, sin embargo es posible que en el
caso de una carga pesada se tenga un K1 negativo.
Típicamente el diseño esta enfocado en asegurar un K1 positivo. .
Para analizar el impacto de los cambios en el voltaje en la función de transferencia del
ángulo del torque, considerado en la figura 7 sin un regulador de voltaje. Este diagrama de
bloques se encuentra en la figura 9.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 19
Figura 9. Diagrama de bloques sin un regulador de voltaje. [4]
2.3.5 Efecto de un regulador de voltaje.
Se utilizara un regulador de voltaje de primer orden con la función de transferencia
e fd KA
=− (41)
Et 1 + sT A
El valor de KA debe ser escogido con mucho cuidado para proveer de una buena
dinámica de lazo cerrado. Para analizar el impacto de un regulador de voltaje en estabilidad de
sistemas, se podría compara la función de transferencia relevante para el torque en
sincronización en dos casos: (1) sin el regulador de voltaje y (2) con el regulador de voltaje. Esta
función de transferencia es aproximadamente.
∂Te K2K4
≈− (42)
dδ K A K 6 (1 + sT ' d 0 / K A K 6 )
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 20
Se podría ver que la componente negativa en un torque en sincronización es mas pequeño
por un factor de 1/KAK6K3 sin un regulador de voltaje presente. También, dado que la constante
de tiempo ha sido reducida con una ganancia alta del regulador de K3T’d0 a T’d0/KAK6 esto
reduce el torque.
En la figura 10 se muestra el diagramas de bloques del modelo con un regulador de
voltaje y el la figura 11 se muestrea el modelo con un PPS.
Figura 10. Diagrama de bloques con un regulador de voltaje. [4]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 21
Figura 11. Modelo simplificado de una maquina con un PSS. [4]
2.3.6 Estabilizador de sistemas de potencia PSS.
Dado que el efecto de K5 podría llevar a un inesperado amortiguamiento negativo a pesar
de los efectos naturales de los devanados de amortiguamiento, un elemento de control
suplementario ha sido introducido para intentar solucionar este problema, a través de los PSS’s.
La función básica de un PSS es extender los límites de la estabilidad a través de la
modulación de la excitación del generador para proveer amortiguamiento en las oscilaciones de
la máquina sincrónica. Para proveer amortiguamiento el sistema de potencia debe producir una
componente eléctrica a través del torque del rotor que se encuentra en fase con las variaciones de
la velocidad.
El diagrama de bloques de la figura 11 ilustra, a través de funciones de transferencia
básicas, la relación entre torque aplicado a la turbina del generador y el desplazamiento entre el
voltaje de campo y de salida (δ).
Se puede considerar que el torque eléctrico tiene dos componentes, uno producido por el
estabilizador del sistema de potencia únicamente para modular el flujo del generador y otro que
resulta de todas las demás fuentes, incluyendo la dinámica del eje.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 22
La contribución del torque dado por el estabilizador es
∂TEP
= PSS ω ( s )GEP( s ) ≡ P( S ) (43)
dω G
La función de transferencia GEP (s) representa la característica del generador, la
excitación del sistema y el sistema de potencia. Para modelarlo se utiliza la siguiente relación
K 2 ∂ET
GEP( s ) ≈ (44)
K 6 ∂E REF
La relación es usada rutinariamente para procedimientos de sintonización que involucra
medidas de las características de lazo cerrado del regulador de voltaje para determinar la
compensación de fase necesaria por el PSS. La variación del GEP con ganancia en la excitación
KA el generador cargado y la inercia del sistema AC, juegan un rol dominante en los
requerimientos de sintonización y desempeño de un estabilizador de sistemas de potencia.
Es importante tener en mente que el estabilizador esta diseñado para proveer
amortiguamiento en pequeñas variaciones alrededor de un punto de operación en estado estable,
y no para mejorar la estabilidad transitoria. Es decir no posee la habilidad de recuperarse a una
severa perturbación. De hecho, el diseño de un estabilizador no muestra buen desempeño en
estabilidad transitoria. Muchas consideraciones prácticas también son necesarias para sintonizar
un PSS, entre las más importantes que existe la posibilidad de un daño por interacción del torque
y el filtrado necesario para prevenir este problema. Además, un diseño típico de PSS es sensible
a varios problemas de ruido.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 23
3.0 Estabilidad transitoria global y regulación de voltaje
3.1 La importancia del control global
El uso de técnicas de control en sistemas de potencia es una de las áreas más
prometedoras en cuanto a aplicación. Para mejorar la respuesta de la estabilidad transitoria, en
los últimos años se ha puesto mucha atención en la aplicación del acercamiento por linealización
de la retroalimentación (“feedback linearization approaches”). Comparado con el uso de la
linealización aproximada convencional, que puede trabajar sólo con estabilidad local cerca de un
punto de operación, el uso de este otro método permite manejar grandes perturbaciones y
mantener estable la condición del sistema luego de una falla. Inevitablemente, para optimizar la
estabilidad el factor de potencia es otra de las variables de retroalimentación donde el voltaje del
generador no es necesario. En dicho control de estabilidad transitoria, un fenómeno común es
que el nivel del voltaje después de la falla es inferior al del voltaje deseado antes del evento.
Desde el punto de vista práctico, la calidad del voltaje muy importante como un índice del
desempeño del sistema de potencia, por lo tanto se espera que retorne al valor deseado. En las
ecuaciones de este análisis y la regulación del voltaje se logra través de la retroalimentación del
voltaje. Sin embargo, los controladores encargados de esto son sólo efectivos alrededor del
punto de operación y por lo tanto funcionan bien sólo para pequeñas perturbaciones y un periodo
después de la falla pero pocos sobreviven a grandes perturbaciones.
En el diseño de controladores lineales, se ha intentado coordinar los requerimientos de las
distintas variables con el fin de estabilizar el sistema y regular el voltaje con un solo controlador.
En nuestro análisis, las ecuaciones 5 y 6 incluyen un avanzado control robusto para manejar las
variables dadas por el estabilizador del sistema de control (“Power System Stabilizer” –PSS-) y
el regulador automático de voltaje (“Automatic Voltage Regulator” –AVR-). Un esquema
práctico llamado control de excitación discontinuo (DEC) alterna el módulo de control de la
estabilidad transitoria para aumentar el PSS usual. En los diseños el sistema se asume lineal. No
obstante, el DEC funciona de manera que distinta ya que utiliza distintas configuraciones de
control para distintos puntos de operación.
Los diferentes comportamientos de los sistemas de potencia no lineales requiere de
distintos objetivos de control y por lo tanto distintas acciones de control deben ser llevado a
cabo. Como lograr un desempeño satisfactorio en un rango amplio de puntos de operación
preestablecido es un apartado importante desde el punto de vista práctico y el la clave del control
global. El control global es un concepto relativamente nuevo que ha evolucionado de ideas más
básicas. La idea básica es combinar el conocimiento cualitativo y cuantitativo del sistema para
establecer jerarquías de control. Se han obtenido resultados positivos del control heterogéneo
cuando utilizamos una combinación de acciones de controladores locales según el punto de
operación. Una característica importante de este método es que utiliza resultados maduros de
controladores locales que provea de la coordinación necesaria.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 24
Se pretende entonces utilizar el control global para mantener la estabilidad relativa y
lograr un nivel de voltaje adecuado luego de una perturbación severa. La señal de control del
controlador global es el promedio de las señales de los controladores locales cada uno valorado
de acuerdo al punto de operación donde nos encontremos. Para esto, utilizamos una función
llamada función de asociatividad (“membership function”). Dado que la función de
asociatividad puede ser determinada directamente de la medición de las distintas variables de
control resulta de mucha utilidad. El control global logra superar las perturbaciones valorando la
relevancia de la estabilidad y la regulación y cambiando del AVR al PSS según sea necesario
logrando así una respuesta suave.
Para lograr la comparación de la respuesta con los distintos controladores usamos el
modelo explicado anteriormente que involucra tanto ecuaciones de la mecánica del generador
sincrónico como las eléctricas. La falla considerada para la comparación entre la respuesta de
los distintos controladores a la perturbación es un cortocircuito en las tres fases ocurrida en una
de las líneas de transmisión. El control de estabilidad transitoria se define como sigue:
Diseñar la entrada uf de un control de excitación AVR para que el sistema de potencia,
dado que el sistema a lazo cerrado sea transitoriamente estable y el generador mantenga
sincronismo cuando es objeto de una perturbación severa.
Recuérdese que:
Ef = kcuf (45)
donde Ef es voltaje de campo del generador y kc la ganancia del controlador.
3.2 Controladores existentes y sus problemas
3.2.1 Controlador no lineal DFL
Como se discutió anteriormente, linealizar es un método al que normalmente apelamos
para sistemas no lineales. Dado que transforma el sistema a uno lineal en un amplio rango de
valores, ha sido aplicado comúnmente a los sistemas de potencia. A continuación se describe
brevemente la compensación por linealización de retroalimentación directa (DFL).
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 25
Tomando las ecuaciones mecánicas:
δ& = ω (46)
D ω
ω& = − ω − 0 ∆Pe (47)
2H 2H
1 1
∆P&e = − ' ∆Pe + ' v f (48)
T T
donde:
∆Pe = Pe − Pm 0 (49)
'
x ds '
T' = T d0 (50)
xds
Vs ' V V
vf = senδ kcu f + T 'd 0 ( xd − xd ) s senδω + T ' s Eq cos δω − Pm 0 (51)
xds xds xds
Figura 12. Una máquina simple conecta a un sistema de potencia. [3]
Nótese que el control de la potencia mecánica Pm0 es representada como una constante y
por tanto el lazo de control es relativamente lento. De (49) notamos que el sistema es lineal con
una variable nueva vf. Podemos usar las técnicas de control robusto para resolver la ecuación
algebraica de Ricatti (ARE), se obtiene la ley de control de la compensación por DFL:
v f = − kδ δ − k w w − k p ∆Pe (52)
donde kδ, kω y kp son las ganancias obtenidas de la solución de la ecuación.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 26
Sustituyendo para hallar uf:
xds ' Vs V
uf = v f − T Eq cos δω + Pm 0 − T 'd 0 ( xd − xd ) s sin δω
'
(53)
kcVs sin δ xds kc xds
El control con DFL no lineal garantiza la estabilidad transitoria del sistema de potencia
para valores admisibles de xL y Vs.
Aún así, como Vt es una función no lineal de δ, Pe y la estructura del sistema, cualquier
cambio puede causar que el voltaje alcance otro nivel aún y si δ y Pe son forzados a retroceder a
sus valores iniciales. Por lo tanto, un generador puede volver a otro estado después de la falla, lo
que es un resultado indeseado.
De lo anterior, podemos ver que aunque el compensador DFL no lineal es efectivo para la
estabilización pero no garantiza la regulación de voltaje. Las simulaciones posteriores mostradas
en la sección siguiente permitirán verificar que el compensador DFL mejora la estabilidad
transitoria de los sistemas de potencia, pero no logra por sí mismo asegurar que se lleve el
sistema al voltaje deseado luego de la perturbación.
3.2.2 Regulador de voltaje
La regulación del voltaje es muy importante sobretodo luego de una falla en el sistema.
El objetivo principal es lograr que el valor deseado de voltaje llegue a su valor nominal.
Retomando la ecuación del voltaje en los terminales del generador:
f (t ) f (t )
∆V& = f1 (t )ω + 2' ∆Pe + 2' v f (54)
T d0 T d0
donde f1(t) y f2(t) son funciones no lineales de δ, Pe y Vt. Dado que f1(t) y f2(t) son dependientes
de las condiciones de operación, sus límites pueden encontrarse en regiones de operación bien
definidas. Se puede entonces linealizar el sistema que es representado por el vector [∆Vt,w,
∆Pe]. Las técnicas de control robusto se pueden aplicar dando como resultado:
v f = −kv ∆Vt − kωω − k p ∆Pe (55)
donde nuevamente kv, kw y kp son ganancias que dependen de los limites de f1(t) y f2(t). El
valor de la excitación real se determina utilizando la relación (54).
Dado que el voltaje es introducido como una variable retroalimentada en se previene que
el voltaje después de la falla sufra una variación excesiva. Además, es innecesario regular δ una
vez que la regulación transitoria es asegurada.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 27
Sin embargo, dado que el diseño de los controladores de voltaje envuelve estimaciones de
regiones donde se cumple el comportamiento lineal, existe sólo una efectividad local. En otras
palabras, cuando ocurren serias perturbaciones donde se extralimiten la región lineal, el sistema
diseñado puede no funcionar bien.
Finalmente, los controladores de voltaje controlan bien el voltaje, aunque sólo para
perturbaciones dentro de las regiones donde la linealidad se cumpla.
3.2.3 Control coordinado a través de conmutación
Se puede ver, entonces, que ambos esquemas de control cumplen diferentes objetivos de
control en diferentes regiones del estado luego de la perturbación. Se verá más adelante que si se
coordina ambos controladores (AVR y PSS) se asegura la estabilidad transitoria y la regulación
de voltaje.
Un esquema de conmutación típico puede describirse como sigue:
Paso 1: Cuando ocurre la falla en un tiempo t= t0 el controlador DFL no lineal se
emplea para mantener la estabilidad de los sistemas de potencia.
Paso 2: En t= ts el controlador global conmuta al AVR para mantener el voltaje
después de la falla.
El tiempo de conmutación ts debe ser elegido de manera razonable dentro del periodo
post-transitorio, esto requiere que se conozca la secuencia de falla de manera anticipada.
Además, el tiempo de conmutación debe ser determinado por prueba y error en las simulaciones.
Aunque este tiempo es físicamente adecuado a una falla en particular, puede no operar como se
desea en otra perturbación y esto puede desestabilizar al sistema de potencia. Un tiempo de
conmutación configurado para el primer periodo post-transitorio no puede cambiar a regulación
de voltaje sobre toda la región de trabajo dejando así espacio a fallas posteriores.
En resumen, los obstáculos que evitan que la estrategia de control funcione son los
siguientes:
• El tiempo de conmutación está mal configurado.
• El sistema no es robusto con respecto a diferentes fallas.
Como diseñar un control global que sea robusto con respecto a fallas indeterminadas es un
problema difícil. Antes de empezar con el diseño del controlador global, se muestra la respuesta
de los dos controladores locales discutidos anteriormente.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 28
3.2.4 Simulaciones de controladores locales (AVR y PSS)
Los parámetros de la máquina sincrónica en sistema de potencia mostrada en la figura 12
se modelan con los siguientes parámetros:
xd=1.863 xd´= 0.257 xT=0.127 xL= 0.4853 xad=1.712
T´do= 6.9 H= 4 D=5 Kc = 1 w0= 314.159
Los límites del voltaje de excitación se toma como:
− 3 ≤ kc u f ≤ 6 (56)
El punto de operación del sistema de potencia usado en la simulación:
δ0= 72º Pm0= 0.9p.u. Vt0=1.0p.u.
La falla es un cortocircuito simétrico en las tres fases con la secuencia siguiente:
Caso 1: Falla Permanente
Etapa 1: El sistema está en estado estable antes de la falla
Etapa 2: Ocurre una falla en t=t0;
Etapa 3: La falla se remueve abriéndose los interruptores de las líneas de falla en t =t1;
Etapa 4: El sistema se encuentra en un estado post-falla.
Caso 2: Falla Permanente + incremento en la potencia mecánica de entrada
Etapa 1: El sistema está en estado estable antes de la falla
Etapa 2: Ocurre una falla en t=t0;
Etapa 3: La falla se remueve abriéndose los interruptores de las líneas de falla en t =t1;
Etapa 4: La potencia mecánica de entrada en el generador aumenta en un 30% en un
tiempo t=t2.
Caso 3: Falla Temporal + falla permanente
Etapa 1: El sistema está en estado estable antes de la falla
Etapa 2: Ocurre una falla en t=t0;
Etapa 3: La falla se remueve abriéndose los interruptores de las líneas de falla en t =t1;
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 29
Etapa 4: Se reestablecen las líneas de transmisión en un tiempo t = t3.
Etapa 5: Ocurre otra falla en el tiempo t= t4.
Etapa 6: La falla es removida abriendo los interruptores en t =t5.
Etapa 7: El sistema se encuentra en un estado post-falla.
Para la simulación se escogen los valores de t:
t0 = 0.1s
t1 = 0.25s
t2 = 1s
t3 = 1.4s
t4= 2.1s
t5 = 2.25s
La localización de la falla se registra a través de una constante positiva λ que es la
fracción de la línea a la izquierda de la falla (refiérase nuevamente a la figura 12). Las
localizaciones para cada uno de los tres casos de secuencia de fallas:
Caso 1: λ = 0.035;
Caso 2: λ= 0.204;
Caso 3: λ= 0.04.
Los controladores utilizados en las simulaciones fueron:
Controlador PSS de estabilización transitoria:
Vf = 22.36δ + 12.81ω –82.45∆Pe (57)
Controlador AVR de regulación de voltaje:
Vf = -40.14Vt + 10.11ω – 30.81∆Pe (58)
La respuesta del sistema de potencia con los diferentes tipos de controladores se muestra
en las figuras 13-17. La figura 13 muestra la respuesta del sistema de potencia a lazo cerrado
para tres tipos de controladores en la secuencia de fase del caso 1. La figura 14 muestra la
respuesta para el controlador no lineal transitorio y el regulador de voltaje para el caso 2, además
la respuesta del conmutador para diferentes tiempos es mostrada en la figura 15 para distintos
tiempos de conmutación. En la secuencia de falla del caso 3, las figuras 16 y 17 muestran los
resultados respectivos.
Los resultados de la simulación permiten ver que el controlador no lineal
transitorio FDL estabiliza el sistema luego de la perturbación pero el voltaje luego de la falla
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 30
varía en un valor que oscila entre 10% y 20% lo que no es aceptable en la práctica. El AVR sólo
puede estabilizar el sistema y mantener un buen nivel de voltaje luego de la falla sólo en el caso
1 pero no logra una respuesta apropiada para los casos 2 y 3. Para los controladores conmutados,
el tiempo de conmutación resultó ser importante dado que uno de ellos que era inapropiado
causó la pérdida del sincronismo en el generador sincrónico. Este punto es ilustrado claramente
en las figuras 15 y 16 donde el controlador conmutado con tiempo de conmutación ts = 1s
estabilizó el sistema en el caso 2, pero desestabilizó el sistema en el caso 3.
Los resultados concuerdan con el análisis propuesto anteriormente. Se puede
observar claramente que sobrevivir a una perturbación severa y mantener el voltaje nominal
simultáneamente son de importancia clave en los sistemas de control. La estrategia de simple
conmutación entre controladores PSS y AVR no es confiable dado que no existe un tiempo
universal de conmutación que funcione en todos los casos.
Figura 13. Respuesta de un sistema de potencia para el caso 1: Controlador no lineal DFL ´
`, Controlador de Voltaje ´------`. Tiempo de conmutación t = 1s. [3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 31
Figura 14. Respuesta de un sistema de potencia para el caso 2: Controlador no lineal DFL ´
`, Controlador de Voltaje ´------`. [3]
Figura 15. Respuesta del Sistema de Potencia al caso 2. Conmutación de controladores
‘ ’ ts = 1s ‘---’ts=0.8s [3]
Figura 16. Respuesta de un sistema de potencia para el caso 3: Controlador no lineal DFL ´
`, Controlador de Voltaje ´------`.[3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 32
Figura 17. Respuesta del Sistema de Potencia al caso 3. Conmutación de controladores
‘ ’ ts = 1s ‘---’ts=0.8s [3]
3.3 Control global en sistemas de potencia
El objetivo del control global es, como se recordará, adquirir un buen control a
través de un amplio ámbito de puntos de operación probables. Esto se puede enunciar de la
siguiente manera:
“Diseñar un control retroalimentado no lineal suave que permita mantener un sistema de
potencia transitoriamente estable cuando ocurre una perturbación severa, y restaurar el voltaje al
nivel nominal deseado luego del disturbio”. [3]1
Entre las propiedades deseables están que el sistema sea robusto aún ante fallas
cuyas secuencias no sean conocidas con antelación.
3.3.1 La función asociativa y la región de operación del sistema
Del análisis anterior, se demuestra que si se introduce el ángulo δ en un controlador
retroalimentado, la estabilidad transitoria mejora en gran medida. En la práctica se desea
conseguir ambas estabilidad y buen desempeño después de la falla. Esto significa que luego del
periodo de perturbación, se debe controlar la excitación en los terminales del generador, es decir,
el voltaje Vt. De acuerdo a las condiciones cualitativas de operación y a los objetivos de control
de la zona donde se ubique el punto de operación, se debe crear una estrategia para designar a los
1
Tomado de Guo, Y., D. Hill, Y. Wang. “Global transient stability voltage regulation for
power systems.”
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 33
controladores locales encargados de manejar la respuesta de la mejor manera. Sin embargo, se
deben definir las regiones de operación y las funciones asociativas.
Se usa de esta forma, funciones de forma trapezoidal que puedan indicar diferentes zonas
de operación:
1 1
µv = (1 − )(
−120 ( z −0.08 )
−120 ( z + 0.08 )
) (59)
1+ e 1+ e
µδ = 1 − µv (60)
donde
z = α1ω 2 + α 2 (∆Vt ) 2 (61)
y α1, α2 son constantes positivas que proveen escalamiento apropiado que pueden ser escogidos
de acuerdo a diferentes requerimientos de sensitividad de potencia y voltaje.
Las funciones asociativas se muestran en la figura 18. Se observa que µδ (z) toma su
valor dominante cuando z se aleja del origen, lo que corresponde al periodo transitorio. Por otro
µ
lado, lo mismo se cumple si v (z) se acerca al origen, lo que corresponde al periodo post-
transitorio. Dado que los valores de ambas funciones son obtenidos de valores mesurables, ω y
∆V, la secuencia no debe ser conocida de antemano.
Por ende, toda la región de operación se divide en dos espacios por las funciones
asociativas, donde S1 indica el periodo transitorio y S2 representa el periodo post-transitorio.
S1 = {(ω , ∆V ) µv ≤ µδ }
(62)
S 2 = {(ω , ∆V ) µv > µδ }
La función característica de cada subespacio Sl (1,2) se define como:
1 Z ∈ S l
τ1 = (63)
0 Z ∉ S l
Nótese que τ 1 + τ 2 = 1 . Debe ser apuntado que ω y ∆l son escogidos como las variables
en 61 dado que suficientemente representativas para mostrar el comportamiento de la operación
para problemas de estabilidad transitoria y regulación de voltaje. Si el problema a considerar es
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 34
el voltaje, la potencia reactiva debe ser incluida. Similarmente, los métodos propuestos pueden
extenderse a otros sistemas de potencia. Las funciones asociativas son comunes para separar
condiciones de operación.
Figura 18. Funciones Asociativas. ‘ ’ µδ , ‘----’µv. [3]
3.3.2 Control global
Una vez definido el espacio, es deseable que el controlador DFL no lineal tome efecto en
S1 (periodo transitorio) y el regulador de voltaje funcione durante la región S2 (periodo post-
transitorio). El esquema de control es el promedio de ambos controladores locales valorado de
acuerdo a la región definida por las funciones asociativas:
v f = µδ v f 1 + µ v v f 2 (64)
Donde vf1 es el controlador DFL y vf2 es el controlador de voltaje. El control real de
excitación vf se obtiene de 50.
El control global tiene la siguiente interpretación: en los periodos transitorios el estado
del sistema está lejos del equilibrio, el control primario es regular el voltaje de modo que entre a
la región donde se encuentra el voltaje deseado sin grandes oscilaciones: luego en el periodo
post-transitorio el voltaje necesita ser equilibrado de modo que alcance el valor nominal. Las
funciones asociativas juegan el rol de valorar las contribuciones necesarias del PSS y el AVR de
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 35
modo que ocurra una suave interpolación. Una de las claves es la facilidad con que las funciones
asociativas determinan el peso a través de las variables mesurables. La figura 19 muestra el
control global donde el bloque 1 y 2 representan los controladores locales manejados por las
funciones asociativas.
Figura 19. Esquema de control global. [3]
3.3.3 Discusión del control global
El diseño del control global involucra los siguientes pasos:
• Distinguir cualitativamente las regiones de operación indicados por las funciones
asociativas a través de variables mesurables y las regiones divididas se traslapen.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 36
• El control se logra a través de la conmutación: en el periodo transitorio se debe
amortiguar el ángulo de potencia de las oscilaciones rápidamente, mientras que en
el periodo post-transitorio el voltaje es regulado al equilibrio.
• El control global es la suma de las contribuciones de los controladores locales,
logrando así suaves transiciones entre el periodo transitorio y post-transitorio.
Algunas propiedades del control global son:
• La acción de control se termina a través de variables mesurables de potencia y voltaje,
haciendo innecesario el conocimiento de la secuencia de fallo de antemano.
• El controlador es efectivo en presencia de fallas indeterminadas. El controlador adopta
las propiedades de los controladores locales. Por lo tanto, es robusto con respecto a
parámetros desconocidos.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 37
3.3.4 Simulación
Se vuelve nuevamente a simular el sistema de potencia con los mismos parámetros y se
observa su respuesta a los diferentes casos. Las figuras 20 a 22 muestran el desempeño del
sistema cuando es objeto de fallas. En la secuencia de fallo para el caso 1, la figura 20 muestra
un desempeño transitorio bueno y una restauración del voltaje nominal en el periodo post-
transitorio. El la figura 21 se muestra la respuesta a la secuencia de falla del caso 2 con similares
resultados. Esto contrasta con las figuras 14 y 12 para controladores locales conmutando. La
figura 22 (caso 3) contrasta con la figura 16 y 17, donde se logra estabilidad transitoria y voltaje
nominal post-transitorio adecuado. Finalmente, la figura 12 muestra las respuestas de ángulo y
voltaje con respecto a localizaciones de fallas distintas. Se demuestra así que el objetivo
principal del control global se cumple respondiendo de manera adecuada a distintos fallos.
Figura 20a. Respuesta del Sistema de Potencia al caso 1 usando el control global. [3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 38
Figura 20b. Respuesta del Sistema de Potencia al caso 1 usando el control global. [3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 39
Figura 21. Respuesta del Sistema de Potencia al caso 2 usando el control global. [3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 40
Figura 22. Respuesta del Sistema de Potencia al caso 3 usando el control global. [3]
Figura 23. Respuesta del sistema de Potencia con diferentes localizaciones de falla.
‘ ’ λ= 0.1, ‘------’ λ=0.5, ‘ ’ λ=0.8 [3]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 41
4.0 AVR digitales y PSS
Como resultado del incremento en la capacidad y la expansión en el área operativa de de
los sistemas de potencia, además del incremento constante en la carga de potencia, ha habido una
tendencia tanto para la estabilidad de potencia así como para la estabilidad de voltaje a decaer los
sistemas de potencia, este decaimiento se ha convertido en un tema de presión.
Figura 24. Sistemas de potencia y estabilidad. [5]
4.1 CD-AVR (“Compact Digital Automatic Voltage Regulator”) y PSS
(“Power System Stabilizer”)
Para cumplir con el control de excitación para la estabilidad de potencia, es necesario
medir precisa y rápidamente varios tipos de datos de perturbaciones de potencia, incluyendo la
potencia efectiva (P), frecuencia interna (fq), velocidad rotacional (ω); también es necesario
implementar un algoritmo de control que pueda usar estas señales de entrada para garantizar
control de un amplio rango frecuencias de perturbaciones de potencia. Debido a que el control
fino el difícil de conseguir con métodos controladores convencionales analógicos, se ha utilizado
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 42
tecnología de 32-bits para desarrollar un CD-AVR, y junto con el PSS, se implementaron en un
software.
Para mejorar la estabilidad en los sistemas de potencia y el mantenimiento por los medios
de PSS, los siguientes puntos fueron considerados en CD-AVR.
1) El desarrollo de un modulo de control de voltaje – VCM (Voltaje control module) –
compacto, que integre una entrada análogo por el valor de la corriente instantánea y la
implementación de control de voltaje de alta precisión.
2) Implementación de un sistema de redundancia paralela que tome ventaja de las características
de control reduciendo los cambios en el voltaje que aparecen cuando una perturbación ocurre
en uno de los sistemas.
3) En sistemas de maquinas – humano, operaciones de un solo paso para el ajuste de las
constantes de control, el monitoreo y grabación de las condiciones de operación, y la alarma
mostrada en la pantalla del AVR, de tal manera que la prueba de campo y el ajuste de
parámetros para la instalación de estabilizadores de sistemas, que va a ser particularmente
importante en el futuro, pueda ser realizada fácilmente y sin la utilización de instrumentos
especiales de prueba.
4) Mejorar la visibilidad permitiendo al equipo de monitoreo del AVR hacer correspondencias
uno a uno entre el diagrama lógico y el programa de control permitiendo el mantenimiento
fácil y el manejo a través de un documento de manejo unificado.
5) Reducción del requerimiento del espacio en un cincuenta por ciento o más para el
almacenamiento de la unidad de control de voltaje.
Figura 25. Ejemplo de un sistema CD-AVR de redundancia paralela. [5]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 43
Además, el sistema puede manejar generadores de mayor capacidad (arriba de los 1000
MW) y puede ser aplicado para actualizar instalaciones donde el espacio es reducido o para
plantas nuevas.
La Empresa Hitachi, Ltd. Ha instalado CD-AVR para el generador Minato 2 (350 MW)
en la estación de potencia Higashi-Niigata y en el generador N°3 (825MW) en la planta nuclear
de Onagawa, ambos pertenecen a Tohoku Electric Power, Inc.
4.2 PSS
El método PSS que es usado ampliamente actualmente es basado en la señal ∆P (∆P-
PSS) con la potencia efectiva como entrada. Este método es aplicado para suprimir la
perturbación de potencia local entre generadores.
Para perturbaciones de baja frecuencia que ocurren entre sistemas en operación, existe
una pequeña perturbación en la señal de potencia activa, así que ∆P-PSS tiene poca efectividad.
Como una solución a este problema se utilizan ∆P+∆ω-PSS que utiliza la frecuencia interna del
sistema o la velocidad rotacional ω así como también la potencia activa.
4.2.1 PSS de entradas múltiples:
Como un método estabilizador de generadores ∆P-PSS son ampliamente usados, aunque
últimamente, el PSS que utiliza el método ∆P-∆ω, ha sido muy útil para el propósito de
estabilización en áreas amplias. Sin embargo, para garantizar la estabilidad en sistemas de
transmisión de potencia a largas distancias y para lograr un rendimiento controlado que no sea
afectado fácilmente por cambios es los estados del sistema (robustez), se utiliza el PSS de
múltiples entradas, en la que la variación de los VAR, ∆Q, es añadida al método ∆P-∆ω.
Debido a que el ∆Q prácticamente no es afectado por las condiciones de operación del
sistema en comparación con el ∆P y contiene el ángulo de la diferencia de fase interna ∆δ entre
el sistema y el generados en una proporción casi igual, es muy efectivo para eliminar las
perturbación que aparecen a bajas frecuencias.
En PSS de múltiples entradas, un circuito para mejorar la estabilidad transitoria es
añadida, de esta manera se obtienen un efecto excelente para la estabilidad transitoria y en
operación.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 44
Figura 26. Ejemplos de resultados en estabilidad de potencia. [5]
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 45
4.0 Conclusiones
Después de realizar este estudio en el que se han analizado el dispositivo AVR y el PSS se ha
llegado a las siguientes conclusiones:
• La utilización de modelos matemáticos para la creación de sistemas de control es un
método que lo simplifica de gran manera y permite darse libertades a la hora de sentar
supuestos sobre las variables del sistema.
• Los métodos para el análisis de sistemas logran simular con gran veracidad cualquier o
casi cualquier dispositivo real, simplificando el cálculo y permitiendo crear variantes de
un modelo base que se acople a las necesidades existentes.
• El uso de dispositivos como el AVR en conjunto con un PSS demuestra como con estos
aparatos se obtienen mejores resultados, se pueden configurar diferentes respuestas a
perturbaciones del sistema y mejoran la transmisión de potencia en el sistema eléctrico
nacional. Se corrigen con estos elementos las imperfecciones de las máquinas
sincrónicas, generados por problemas de fabricación o falta de una mejor tecnología
además de mejorar los problemas de regulación de la carga.
• El uso del AVR como elemento único de control sobre un generador no resuelve por
completo los problemas de estabilidad de la señal de salida del sistema y nos remite a la
utilización de diferentes dispositivos que regulan y mejoran cada uno un problema del
caso.
• Conforme avanza la tecnología se obtienen nuevas soluciones y dispositivos que se
adaptan cada vez mejor a los problemas específicos. Se crean nuevos modelos y se
desarrollan aparatos que de otra manera no se hubieran podido crear. Esta afirmación se
puede observar al ver la evolución del AVR al utilizarse en un principio elementos
pasivos y lineales y ahora utilizándose sensores electrónicos con dispositivos digitales.
Grupo [14] I Semestre de 2005
IE-431 Reguladores automáticos de voltaje en conjunto con estabilizadores de sistemas de potencia (AVR + PSS) 46
5.0 Bibliografía
1. Arrillaga, J. “Computer Modelling of Electrical Power Systems.” Segunda edición.
Editorial John Wiley & sons. 2001.
2. Chow, J., H. Ren, S. Wang. ”Controller structure design using power system stabilizers in
multi-machine power system.” ECSE department, Rensselaer Polytechnic Institute, Troy,
NY, USA.
3. Guo, Y., D. Hill, Y. Wang. “Global transient stability voltage regulation for power
systems.” IEEE Transactions on power systems. Vol XX. 2001.
4. Ilic, M., J. Zaborszky . “Dynamic and control of large electric power systems”. Editorial
John Wiley & sons. 2000.
5. Kitauchi, Y., S. Kitamura. ”Recent developments on generator excitation control system-
Introduction of digital AVR at power system stabilization technology.” Hitachi Review
Vol49#2. 2000
6. Momoh, J., M.E. El-Hawary “Electric systems, dynamics, and stability with artificial
intelligence applications.” Marcel Dekker, Inc. 2000.
Grupo [14] I Semestre de 2005
También podría gustarte
- Constancia Servicio TecnicoDocumento2 páginasConstancia Servicio TecnicoEduardo DavidAún no hay calificaciones
- Instalacion de ResistenciaDocumento1 páginaInstalacion de ResistenciaEduardo DavidAún no hay calificaciones
- Cummins 136 KWDocumento2 páginasCummins 136 KWEduardo DavidAún no hay calificaciones
- VariablesDocumento38 páginasVariablesEduardo David0% (1)
- HipótesisDocumento13 páginasHipótesisEduardo DavidAún no hay calificaciones
- Marco TeóricoDocumento26 páginasMarco TeóricoEduardo DavidAún no hay calificaciones
- Norma ApaDocumento34 páginasNorma ApaEduardo DavidAún no hay calificaciones
- Norma Tecnica Del Seguro Complementario de Trabajo de RiesgoDocumento31 páginasNorma Tecnica Del Seguro Complementario de Trabajo de RiesgoEduardo DavidAún no hay calificaciones
- CALIDADDocumento30 páginasCALIDADEduardo DavidAún no hay calificaciones
- Normalizacion Tecnica y Medio AmbienteDocumento63 páginasNormalizacion Tecnica y Medio AmbienteEduardo DavidAún no hay calificaciones
- Guia Veloz de Power WizardDocumento1 páginaGuia Veloz de Power WizardEduardo David100% (1)
- Código Nacional de Electricidad - UtilizaciónDocumento56 páginasCódigo Nacional de Electricidad - UtilizaciónEduardo David100% (1)
- Minicargador - Inspección Alrededor Del EquipoDocumento17 páginasMinicargador - Inspección Alrededor Del Equiporodri linaresAún no hay calificaciones
- Nrf-204-Pemex-2012 Vaar SDocumento39 páginasNrf-204-Pemex-2012 Vaar Stono198Aún no hay calificaciones
- CSL-108900-1-6-ET-103 Rev B-Transformador Tensión Inductivos 138 KVDocumento9 páginasCSL-108900-1-6-ET-103 Rev B-Transformador Tensión Inductivos 138 KVElmer SullcaAún no hay calificaciones
- Recuperacion de Condensado YissDocumento5 páginasRecuperacion de Condensado YissYisbell LeónAún no hay calificaciones
- Practica #03 - Diagrama IshikawaDocumento3 páginasPractica #03 - Diagrama IshikawaA J V ZAún no hay calificaciones
- Analisis de Riesgos Del Proyecto Saneamiento PasacanchaDocumento35 páginasAnalisis de Riesgos Del Proyecto Saneamiento Pasacanchajhonhilbert0% (2)
- Trabajo1 HVDC UHV ACDocumento4 páginasTrabajo1 HVDC UHV ACStalyn BanegasAún no hay calificaciones
- Ammann Rodillo ASC 120Documento4 páginasAmmann Rodillo ASC 120Wilson AdrianoAún no hay calificaciones
- Osinerg No.236 2005 Os CD NormaDocumento30 páginasOsinerg No.236 2005 Os CD NormajhordanAún no hay calificaciones
- Cómo Ha Sido La Política Ecuatoriana Sobre Energías LimpiasDocumento2 páginasCómo Ha Sido La Política Ecuatoriana Sobre Energías LimpiasPatricio GonzalezAún no hay calificaciones
- Trabajo Del ReciclajeDocumento5 páginasTrabajo Del ReciclajeYusmey GilAún no hay calificaciones
- Compendio de Quimica OrganicaDocumento62 páginasCompendio de Quimica OrganicaLinibeth UrdanetaAún no hay calificaciones
- Review Amoladora Angular GWS 7-125Documento3 páginasReview Amoladora Angular GWS 7-125Jesús CarriónAún no hay calificaciones
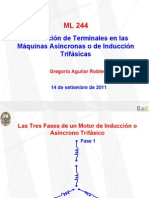
- Numeración de Terminales en Las Máquinas Asíncronas o de Inducción TrifásicasDocumento36 páginasNumeración de Terminales en Las Máquinas Asíncronas o de Inducción TrifásicasRubensaiD100% (2)
- ANTICONGELANTEDocumento16 páginasANTICONGELANTEJose Uriel Vazquez MarinAún no hay calificaciones
- Catalogo Conermex 2021Documento70 páginasCatalogo Conermex 2021carlos chavarroAún no hay calificaciones
- Info A09n01Documento24 páginasInfo A09n01Alfredo CordovaAún no hay calificaciones
- Maquinaria para La Compactacion de Los Suelos y Su RendimientoDocumento34 páginasMaquinaria para La Compactacion de Los Suelos y Su RendimientoManuel Mucha VasquezAún no hay calificaciones
- 4 Convertidores para Accionamientos DCDocumento33 páginas4 Convertidores para Accionamientos DCangelpadronaAún no hay calificaciones
- Computos Metricos Mantenimiento ControlnetDocumento4 páginasComputos Metricos Mantenimiento ControlnetAdrian Romero RomeroAún no hay calificaciones
- Suspended Permanent CP SPANISHDocumento39 páginasSuspended Permanent CP SPANISHAlfonso TabuencaAún no hay calificaciones
- Oscilaciones ElectromagneticaDocumento8 páginasOscilaciones ElectromagneticaahsimAún no hay calificaciones
- Reacciones RedoxDocumento12 páginasReacciones RedoxKarla BairesAún no hay calificaciones
- Tesis Durabilidad LeticiaOrtegaMadrigal PDFDocumento265 páginasTesis Durabilidad LeticiaOrtegaMadrigal PDFAlvaro Bacián100% (1)
- Bosque Panul y Expansión UrbanaDocumento25 páginasBosque Panul y Expansión UrbanaIsa E. Valenzuela100% (1)
- Interpretacion de La Norma Api 1104 168579 Downloable 2351697Documento148 páginasInterpretacion de La Norma Api 1104 168579 Downloable 2351697MarioAún no hay calificaciones
- Actividades de Aprendizaje Introduccion de ConceptosDocumento6 páginasActividades de Aprendizaje Introduccion de ConceptosYULIETH KATHERINE CANGREJO QUINTEROAún no hay calificaciones
- Aceite Exxon MobilDocumento2 páginasAceite Exxon MobilAle Samy VillaAún no hay calificaciones
- 1 Festo Pneumatics - Basic LevelDocumento15 páginas1 Festo Pneumatics - Basic LevelAlcides Luis Fabián BráñezAún no hay calificaciones
- Ybr125ed 2008Documento52 páginasYbr125ed 2008Cecilia GilAún no hay calificaciones