También podría gustarte
- Diagramas de Instrumentación PIDDocumento35 páginasDiagramas de Instrumentación PIDJordan G. TorresAún no hay calificaciones
- Firebase Cloud Messaging (FCM)Documento28 páginasFirebase Cloud Messaging (FCM)Randy RodríguezAún no hay calificaciones
- Gestión de Proyecto Informaticos Capítulo 3Documento33 páginasGestión de Proyecto Informaticos Capítulo 3Randy RodríguezAún no hay calificaciones
- Gestión de Proyectos InformaticosDocumento24 páginasGestión de Proyectos InformaticosRandy RodríguezAún no hay calificaciones
- Gestión de Proyectos InformaticosDocumento24 páginasGestión de Proyectos InformaticosRandy RodríguezAún no hay calificaciones
- Gestión de Proyectos InformaticosDocumento24 páginasGestión de Proyectos InformaticosRandy RodríguezAún no hay calificaciones
- Tarea 5 - E-CommerceDocumento23 páginasTarea 5 - E-CommerceRandy RodríguezAún no hay calificaciones
- Gestión de Proyectos InformaticosDocumento24 páginasGestión de Proyectos InformaticosRandy RodríguezAún no hay calificaciones
- Capítulo 2Documento32 páginasCapítulo 2Randy RodríguezAún no hay calificaciones
- Chapter 3 EsDocumento24 páginasChapter 3 EsRandy RodríguezAún no hay calificaciones
- La Informática Como Herramienta Del Auditor FinancieroDocumento24 páginasLa Informática Como Herramienta Del Auditor FinancieroAmauri Garcia SayagoAún no hay calificaciones
- Cap9 AplicacionesDistribuidasDocumento50 páginasCap9 AplicacionesDistribuidasManuel CanulAún no hay calificaciones
- IntroduccionDocumento16 páginasIntroduccionRandy RodríguezAún no hay calificaciones
- Motores y SensoresDocumento30 páginasMotores y SensoresPablo Andrés100% (3)
- Proyectos de InversiónDocumento17 páginasProyectos de InversiónRandy RodríguezAún no hay calificaciones
- Simulación de procesos con Simul8Documento14 páginasSimulación de procesos con Simul8Randy RodríguezAún no hay calificaciones
- Dinámica de Sistemas en AcciónDocumento19 páginasDinámica de Sistemas en AcciónRandy RodríguezAún no hay calificaciones
- Comprobación de La Generación de Números Aleatorios Pertenecen A Una Distribución UniformeDocumento3 páginasComprobación de La Generación de Números Aleatorios Pertenecen A Una Distribución UniformeRandy RodríguezAún no hay calificaciones
- Interés CompuestoDocumento2 páginasInterés CompuestoRandy RodríguezAún no hay calificaciones
- Curriculum - Solis Zambrano Hilda EvelynDocumento12 páginasCurriculum - Solis Zambrano Hilda EvelynRandy RodríguezAún no hay calificaciones
- Analisis Numerico BasicoDocumento256 páginasAnalisis Numerico BasicoJuniorOrtizAún no hay calificaciones
- Documento Del Proyecto de Aula IndividualDocumento20 páginasDocumento Del Proyecto de Aula IndividualBryan Steven Cortez ChichandeAún no hay calificaciones
- Lista de Precios: Equipamiento Eléctrico y Electrónico para El Sector Industrial, Comercial y ResidencialDocumento148 páginasLista de Precios: Equipamiento Eléctrico y Electrónico para El Sector Industrial, Comercial y ResidencialJosé lAún no hay calificaciones
- Cracterizacion de Un Sensor RTD de Tipo PT100Documento6 páginasCracterizacion de Un Sensor RTD de Tipo PT100Yeison Stiven Jiménez MejíaAún no hay calificaciones
- Control de TemperaturaDocumento75 páginasControl de Temperaturadiego choqueAún no hay calificaciones
- Cadena de MediciónDocumento5 páginasCadena de MediciónDavid ReyesAún no hay calificaciones
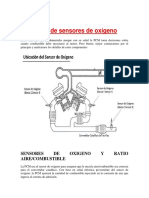
- Curso de Sensores de OxigenoDocumento19 páginasCurso de Sensores de OxigenoChristian Ramos Campos100% (1)
- Sistema de Inducción de AireDocumento2 páginasSistema de Inducción de AirePiratonBarbanegraAún no hay calificaciones
- Uso y Calibración de Deflectometros de ImpactoDocumento54 páginasUso y Calibración de Deflectometros de ImpactofhbenavidezAún no hay calificaciones
- Laboratorio de Sensor de PresionDocumento5 páginasLaboratorio de Sensor de PresionyOmaRAún no hay calificaciones
- VentusDocumento180 páginasVentusEduardo NunesAún no hay calificaciones
- Según La Anterior AnimaciónDocumento3 páginasSegún La Anterior Animaciónosvaldo arenaAún no hay calificaciones
- Sensores de Posicion OpticosDocumento5 páginasSensores de Posicion OpticosJorge Alonso GarciaAún no hay calificaciones
- SenMecEléctIndConDocumento12 páginasSenMecEléctIndConRosmaryCafaro100% (1)
- Control de dos posiciones ON/OFFDocumento7 páginasControl de dos posiciones ON/OFFDavid Ferrusca MartinezAún no hay calificaciones
- Catalogo Accesorios para Carrotanques Syz PDFDocumento23 páginasCatalogo Accesorios para Carrotanques Syz PDFMelina Sbh100% (1)
- MedidorPresiónDigital0.1kPaDocumento11 páginasMedidorPresiónDigital0.1kPapeterclamptonAún no hay calificaciones
- Sensores de HumedadDocumento29 páginasSensores de HumedadpablojajaAún no hay calificaciones
- P05 Sistemas de MedidaDocumento5 páginasP05 Sistemas de MedidaAlVarometro Presión FijaAún no hay calificaciones
- Manual Usuario SmartWatchWebDocumento136 páginasManual Usuario SmartWatchWebbikendiaguirre100% (1)
- Monitoreo variable plataforma UbidotsDocumento20 páginasMonitoreo variable plataforma UbidotsJonathan RiveraAún no hay calificaciones
- Sensores PiezoelectricosDocumento22 páginasSensores PiezoelectricosHugo Fernando JachoAún no hay calificaciones
- Informe Lab1 SensoresDocumento16 páginasInforme Lab1 SensoresGuillermo BautistaAún no hay calificaciones
- Unidad 1 Temas ExposiciónDocumento9 páginasUnidad 1 Temas ExposiciónCristo CisnerosAún no hay calificaciones
- 6.diagrama de CableadoDocumento35 páginas6.diagrama de CableadoAnonymous gTerattFpQ100% (2)
- Brochure IntrumentacionDocumento15 páginasBrochure IntrumentacionAndres Estepa RojasAún no hay calificaciones
- 56004-3 Sistema EBS, Cotrol de FuncionamientoDocumento8 páginas56004-3 Sistema EBS, Cotrol de FuncionamientoLucho Volvo TronicAún no hay calificaciones
- Manual Instrumentacion IndustrialDocumento69 páginasManual Instrumentacion IndustrialLú Gamarra100% (1)
- Vasquez Sensor ResolverDocumento6 páginasVasquez Sensor ResolverFreddy Luis Vasquez MondragonAún no hay calificaciones
- TrasductorDocumento6 páginasTrasductorjohnny Ivan Choque lopezAún no hay calificaciones
- Sensores y actuadores automotricesDocumento33 páginasSensores y actuadores automotricesHeidi Cantor100% (1)