También podría gustarte
- Enunciado Producto Académico 2Documento4 páginasEnunciado Producto Académico 2Lsknho KennyAún no hay calificaciones
- Proyecto Semestral 2020Documento6 páginasProyecto Semestral 2020Manuel CornejoAún no hay calificaciones
- Parcial 03 ISDocumento1 páginaParcial 03 ISFernando Zapata0% (1)
- Cual Es La Carrera Mas Complicada de La UniDocumento8 páginasCual Es La Carrera Mas Complicada de La Unimaykon pabloAún no hay calificaciones
- Ejercicios FRIODocumento3 páginasEjercicios FRIODilan ValdiviaAún no hay calificaciones
- KERENDocumento5 páginasKERENSilvia Rangel100% (1)
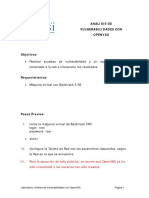
- 6a - Análisis de Vulnerabilidades Con OpenVAS - v1 PDFDocumento4 páginas6a - Análisis de Vulnerabilidades Con OpenVAS - v1 PDFWilliam Melendez RosalesAún no hay calificaciones
- Multiprocesamiento by Hebert VilcaDocumento20 páginasMultiprocesamiento by Hebert VilcaHebert Jonathan Vilca MamaniAún no hay calificaciones
- Examen 1 2010 II Inteligencia Artificial Auto Guard Ado)Documento14 páginasExamen 1 2010 II Inteligencia Artificial Auto Guard Ado)FANTAZMAZULAún no hay calificaciones
- RT-I 2020-I Ramirez-Ebert SwitchDocumento7 páginasRT-I 2020-I Ramirez-Ebert SwitchEbert Ramirez ApazaAún no hay calificaciones
- Concepto Bit, ByteDocumento20 páginasConcepto Bit, BytePaola dell androAún no hay calificaciones
- Examen Final-Prueba de DesarrolloDocumento2 páginasExamen Final-Prueba de DesarrolloHaking intAún no hay calificaciones
- Tema9 Ejercicios PDFDocumento2 páginasTema9 Ejercicios PDFdeiberAún no hay calificaciones
- 02.SDC SQLServer Basico Intermedio Laboratorio02Documento3 páginas02.SDC SQLServer Basico Intermedio Laboratorio02CARLOS ALMEIDAAún no hay calificaciones
- Laboratior de HilosDocumento12 páginasLaboratior de HilosJordanCestAún no hay calificaciones
- Practica # 5Documento14 páginasPractica # 5luis espinozaAún no hay calificaciones
- Problemasalgo Use CaseDocumento7 páginasProblemasalgo Use CasealexcabanillasAún no hay calificaciones
- Sesión 01 - Complejidad AlgorítmicaDocumento46 páginasSesión 01 - Complejidad AlgorítmicaLuisRamiroVílchezSalazarAún no hay calificaciones
- Tema NuSMV 4 PDFDocumento39 páginasTema NuSMV 4 PDFClaudia NavedaAún no hay calificaciones
- MA475 Matematica Computacional 201502Documento5 páginasMA475 Matematica Computacional 201502moaAún no hay calificaciones
- Documentacion Appweb DeliveryDocumento12 páginasDocumentacion Appweb DeliveryElvis Ojeda0% (1)
- Práctica Final de Mat 132Documento2 páginasPráctica Final de Mat 132Gabriel CrookeAún no hay calificaciones
- Silabo Lenguaje de Programacion IIDocumento7 páginasSilabo Lenguaje de Programacion IIAgripino QuispeAún no hay calificaciones
- Técnicas Generales Del Diseño de Software PDFDocumento3 páginasTécnicas Generales Del Diseño de Software PDFDanielAún no hay calificaciones
- Manual de Servicios Web Api - SIRE - Ventas v18Documento76 páginasManual de Servicios Web Api - SIRE - Ventas v18Sistemas BongAún no hay calificaciones
- Clase04 ComplejidadDocumento24 páginasClase04 ComplejidadAlejo CifuentesAún no hay calificaciones
- Barman AutomaticoDocumento65 páginasBarman AutomaticorublasterAún no hay calificaciones
- Foda PeltDocumento9 páginasFoda PeltAlcides Guido Ramos PomaAún no hay calificaciones
- Separata01 ML Uni FimDocumento58 páginasSeparata01 ML Uni FimLUIS ISIDRO HUARCAYA TORRESAún no hay calificaciones
- Proyecto Final de Logica de ProgramaciónDocumento10 páginasProyecto Final de Logica de ProgramaciónDiego Pineda HerreraAún no hay calificaciones
- Modelodenegocio Mcun Mon RupDocumento35 páginasModelodenegocio Mcun Mon Rupjordy Sarmiento EspinozaAún no hay calificaciones
- Ingenieria RequisitosDocumento220 páginasIngenieria RequisitosKa VargasAún no hay calificaciones
- 1era Practica Calificada Open GL CV 2018 IDocumento3 páginas1era Practica Calificada Open GL CV 2018 IUlquiorraAún no hay calificaciones
- Análisis de Sistemas IDocumento85 páginasAnálisis de Sistemas IDavid E. Mendoza GutierrezAún no hay calificaciones
- Modelo Forrester en Vensim v1.0Documento18 páginasModelo Forrester en Vensim v1.0Miguel Malaga OrtegaAún no hay calificaciones
- PMOInformatica Plan de Direccion de Proyecto PlantillaDocumento15 páginasPMOInformatica Plan de Direccion de Proyecto PlantillaYulitza Maileth Fuenmayor SierraAún no hay calificaciones
- Estudios de Casos Metodos NumericosDocumento5 páginasEstudios de Casos Metodos NumericosArnold Alberto Miranda QuispeAún no hay calificaciones
- Proyecto de VirtualizacionDocumento8 páginasProyecto de Virtualizacionaldo gerson Rodriguez dominguezAún no hay calificaciones
- Piad 502 MallaDocumento5 páginasPiad 502 MallaMr AteneaAún no hay calificaciones
- Manual Teorico Del Curso de Programacion en Visual Basic 6.0 - Ingenia Tu Mente PDFDocumento43 páginasManual Teorico Del Curso de Programacion en Visual Basic 6.0 - Ingenia Tu Mente PDFBrenda CaizaAún no hay calificaciones
- CasoDocumento4 páginasCasocynthiaAún no hay calificaciones
- Guía 3 - Teórica-Práctica - Encuentros 12, 13 y 14Documento12 páginasGuía 3 - Teórica-Práctica - Encuentros 12, 13 y 14Cuenta SuscripcionesAún no hay calificaciones
- Computacion GraficaDocumento6 páginasComputacion GraficaVictor Hugo de la PuenteAún no hay calificaciones
- Guia de Actividad 3 - Desarrollo de Un SBCDocumento4 páginasGuia de Actividad 3 - Desarrollo de Un SBCNazareth Z. NavarreteAún no hay calificaciones
- Las 8 Dimensiones de La Calidad de GarvinDocumento3 páginasLas 8 Dimensiones de La Calidad de Garvinjose davidAún no hay calificaciones
- Sumador y Restador CompletoDocumento6 páginasSumador y Restador CompletoKari EzpinossaAún no hay calificaciones
- Informe Prácticas Prepofesionales ESPINOZA MARCODocumento24 páginasInforme Prácticas Prepofesionales ESPINOZA MARCODavid Leon QuezadaAún no hay calificaciones
- Las Tablas de La VerdadDocumento5 páginasLas Tablas de La VerdadCarlos Enrique Caballero Vazquez100% (1)
- Definicion IO EtapasDocumento4 páginasDefinicion IO EtapasAna RiosAún no hay calificaciones
- M TuringDocumento4 páginasM TuringMashu PishuAún no hay calificaciones
- Cuaterniones DualesDocumento9 páginasCuaterniones DualesJüan RojasAún no hay calificaciones
- Trabajo Arquitectura Version 2 2Documento31 páginasTrabajo Arquitectura Version 2 2jrosales9163Aún no hay calificaciones
- Carlos Cuartas 243005 32Documento12 páginasCarlos Cuartas 243005 32carlos cuartasAún no hay calificaciones
- Guía - U1 - Introducción A La Ingeniería IndDocumento16 páginasGuía - U1 - Introducción A La Ingeniería IndDavid Nilton Cerron VilcaAún no hay calificaciones
- Instituto de Educación Superior Tecnológico Privado Trentino Juan Pablo IiDocumento11 páginasInstituto de Educación Superior Tecnológico Privado Trentino Juan Pablo IiDiogenes0% (1)
- ORGANIGRAMA FALATA - AdmiDocumento3 páginasORGANIGRAMA FALATA - AdmiDaste SJAún no hay calificaciones
- Ejercicios Logica Proposicional Resolucion v1.0 PDFDocumento1 páginaEjercicios Logica Proposicional Resolucion v1.0 PDFRaphael MelendezAún no hay calificaciones
- Modelo Tradicional VDocumento4 páginasModelo Tradicional Vjarm28Aún no hay calificaciones
- 17200216Documento5 páginas17200216jorge berriosAún no hay calificaciones
- Aplicación de La DerivadaDocumento5 páginasAplicación de La DerivadaERIK YORDAN FLORES SALINASAún no hay calificaciones
- Segunda Entrega MaterialesDocumento7 páginasSegunda Entrega MaterialesJorge Leonardo HolguinAún no hay calificaciones
- Informe Suelos 2 - Calicata - c1Documento19 páginasInforme Suelos 2 - Calicata - c1Michael Caceres AguilarAún no hay calificaciones
- Choropampa CuestioDocumento7 páginasChoropampa CuestioDilan ValdiviaAún no hay calificaciones
- DOP PiscosDocumento2 páginasDOP PiscosDilan ValdiviaAún no hay calificaciones
- Final Tec Frio 2Documento3 páginasFinal Tec Frio 2Dilan ValdiviaAún no hay calificaciones
- Tarea 6-ITDocumento24 páginasTarea 6-ITDilan ValdiviaAún no hay calificaciones
- Marco Teórico Del Trabajo de InvestigaciónDocumento6 páginasMarco Teórico Del Trabajo de InvestigaciónDilan ValdiviaAún no hay calificaciones
- Filtro Avanzado - EjerciciosDocumento47 páginasFiltro Avanzado - EjerciciosDilan ValdiviaAún no hay calificaciones
- CUESTIONARIODocumento7 páginasCUESTIONARIODilan ValdiviaAún no hay calificaciones
- Plan Investigación Valdivia DilanDocumento14 páginasPlan Investigación Valdivia DilanDilan ValdiviaAún no hay calificaciones
- Foro 1 Dilan Valdivia Luna IaDocumento2 páginasForo 1 Dilan Valdivia Luna IaDilan ValdiviaAún no hay calificaciones
- Capítulo 1 Resúmen Ejecutivo: La Razón Social Es LOBERE S.A.C., y La Marca Es Pisco "Luján"Documento49 páginasCapítulo 1 Resúmen Ejecutivo: La Razón Social Es LOBERE S.A.C., y La Marca Es Pisco "Luján"Dilan ValdiviaAún no hay calificaciones
- Examen Parcial Gestion Financiera Dilan ValdiviaDocumento7 páginasExamen Parcial Gestion Financiera Dilan ValdiviaDilan ValdiviaAún no hay calificaciones
- Trabajo de Marketing FinalitoDocumento145 páginasTrabajo de Marketing FinalitoDilan ValdiviaAún no hay calificaciones
- Foro 3 Dilan Valdivia Luna IaDocumento3 páginasForo 3 Dilan Valdivia Luna IaDilan ValdiviaAún no hay calificaciones
- Método Grid SearchDocumento2 páginasMétodo Grid SearchIrvingFernándezAún no hay calificaciones
- LG GM b258rs Manual de UsuarioDocumento40 páginasLG GM b258rs Manual de Usuariomiguel eliezer ponciano c.Aún no hay calificaciones
- Aplicacion Lantrix SmsDocumento5 páginasAplicacion Lantrix SmsRita BorgoRose50% (2)
- Guia Ejercicios FuncionesDocumento4 páginasGuia Ejercicios FuncionesTity Cristina VergaraAún no hay calificaciones
- Secuencia Didáctica-Informatica Ii 2022BDocumento16 páginasSecuencia Didáctica-Informatica Ii 2022BJesus NavidadAún no hay calificaciones
- Marco TeoricoDocumento131 páginasMarco TeoricoJhon CondoriAún no hay calificaciones
- Apertura de Centro de Apoyo Escolar - InformeDocumento41 páginasApertura de Centro de Apoyo Escolar - Informejeanine Alejandra Cano SilesAún no hay calificaciones
- Ejercicios Equilibrio de Una Particula y Calculo de TorqueDocumento5 páginasEjercicios Equilibrio de Una Particula y Calculo de TorqueJohana Mori VillegasAún no hay calificaciones
- Curvimetro y PlanimetroDocumento10 páginasCurvimetro y PlanimetroAngel Julisses Valderrama Reyes100% (1)
- 1° Evaluación Segundo Semestre, Sistema Ecuaciones IBDocumento5 páginas1° Evaluación Segundo Semestre, Sistema Ecuaciones IBAlejandro QuinterosAún no hay calificaciones
- Factura Del ProveedorDocumento1 páginaFactura Del ProveedordianaAún no hay calificaciones
- Efsrt Minas Proyecto IIDocumento18 páginasEfsrt Minas Proyecto IIJulio Enrique Laguna EspinozaAún no hay calificaciones
- Principios de La Mecanica EstructuralDocumento29 páginasPrincipios de La Mecanica EstructuralTony GutiérrezAún no hay calificaciones
- E.4 - 2do-01-Funcion LinealDocumento4 páginasE.4 - 2do-01-Funcion LinealArturo CenturionAún no hay calificaciones
- Motoniveladora RG 170 PDFDocumento16 páginasMotoniveladora RG 170 PDFerikvidal0% (1)
- Introducción A Las Estructuras TridimensionalesDocumento16 páginasIntroducción A Las Estructuras Tridimensionalesionhidronio0% (1)
- Medida de TemperaturaDocumento3 páginasMedida de TemperaturaAnonymous fK33KBoRAún no hay calificaciones
- Tarea 1 - Resolver Cuestionario Correspondiente Unidad 1 y 2Documento5 páginasTarea 1 - Resolver Cuestionario Correspondiente Unidad 1 y 2joseluisAún no hay calificaciones
- Instrucciones de Programacion BS V9Documento522 páginasInstrucciones de Programacion BS V9Andres CastilloAún no hay calificaciones
- Catalogo Dakota AriDocumento195 páginasCatalogo Dakota AriJonathan AlejosAún no hay calificaciones
- Actividad 2 MCDocumento17 páginasActividad 2 MCMiquelina IzarraAún no hay calificaciones
- Cobertura de Superficies Con Imágenes en AutoCAD Civil 3DDocumento2 páginasCobertura de Superficies Con Imágenes en AutoCAD Civil 3DlmgeomensorAún no hay calificaciones
- Evaluacion de Matemáticas NOHELIADocumento2 páginasEvaluacion de Matemáticas NOHELIAjocelyn perez villarreal0% (1)
- Uso de Refractometro, PH Metro - Balanzas y OtrosDocumento33 páginasUso de Refractometro, PH Metro - Balanzas y OtrosPedro Pablo OblitasAún no hay calificaciones
- INFORME 2009 Fisica IIDocumento168 páginasINFORME 2009 Fisica IIWilliam Taipe50% (2)
- Anti Derivada o PrimitivaDocumento18 páginasAnti Derivada o PrimitivaTabata VegasAún no hay calificaciones
- Conocimiento FilosóficoDocumento2 páginasConocimiento FilosóficoPame Padilla100% (1)
- Seccionadores de Rotación CentralDocumento12 páginasSeccionadores de Rotación CentralYanira Tonguino0% (1)
- Taller 13 EstDocumento23 páginasTaller 13 EstVanessa FloresAún no hay calificaciones