También podría gustarte
- Ejercicios de EstadisticaDocumento20 páginasEjercicios de EstadisticaPaul Chiliquinga71% (7)
- Karl Von TerzaghiDocumento2 páginasKarl Von TerzaghiMiguel Alvarez RoselAún no hay calificaciones
- Constante de Gravitacion UniversalDocumento3 páginasConstante de Gravitacion UniversalMiguel Alvarez RoselAún no hay calificaciones
- 7mo Básico A. Guia 2. Tipos y Composicion Suelo. Suelos de ChileDocumento4 páginas7mo Básico A. Guia 2. Tipos y Composicion Suelo. Suelos de ChileMiguel Alvarez RoselAún no hay calificaciones
- KpiDocumento4 páginasKpiMiguel Alvarez RoselAún no hay calificaciones
- Constante GravitacionalDocumento3 páginasConstante GravitacionalMiguel Alvarez RoselAún no hay calificaciones
- Polaridad ElectricaDocumento1 páginaPolaridad ElectricaMiguel Alvarez Rosel0% (1)
- Torre de EnfriamientoDocumento5 páginasTorre de EnfriamientoMiguel Alvarez RoselAún no hay calificaciones
- Colector de PolvoDocumento2 páginasColector de PolvoMiguel Alvarez RoselAún no hay calificaciones
- Diagrama de PoleasDocumento1 páginaDiagrama de PoleasMiguel Alvarez RoselAún no hay calificaciones
- Analizar Factores de Dualidad-SensibilidadDocumento23 páginasAnalizar Factores de Dualidad-SensibilidadLISBETH CALLATA CHAVARRIAAún no hay calificaciones
- Convocatoria Construye Solar 2019Documento5 páginasConvocatoria Construye Solar 2019Jose Manuel Fuentes CidAún no hay calificaciones
- Ley 11683Documento38 páginasLey 11683jsilva69Aún no hay calificaciones
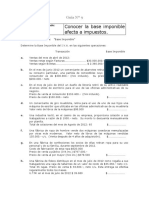
- 2014 Guia - Ejercicio - Nº 9Documento1 página2014 Guia - Ejercicio - Nº 9Jose Zavala PinillaAún no hay calificaciones
- FT - Copa de Inmersión Zahn 2210 - ElcometerDocumento2 páginasFT - Copa de Inmersión Zahn 2210 - ElcometerjccuingenieroAún no hay calificaciones
- Selección Del Foro y Selección de La Ley AplicableDocumento35 páginasSelección Del Foro y Selección de La Ley AplicableFabio Andrés Obando RenteríaAún no hay calificaciones
- "Construcción de Defensas Ribereñas en Las Margenes Del Rio Reque en Los Distritos de Ciudad Eten y MonsefuDocumento19 páginas"Construcción de Defensas Ribereñas en Las Margenes Del Rio Reque en Los Distritos de Ciudad Eten y MonsefuGeynerCaneloAún no hay calificaciones
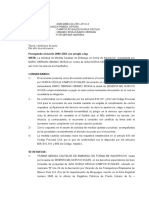
- Res 20080086320105315000821516Documento2 páginasRes 20080086320105315000821516Hernán Cahuana OrdoñoAún no hay calificaciones
- Prop. Pasivo ALONSO JAVIER ARRIAGADADocumento5 páginasProp. Pasivo ALONSO JAVIER ARRIAGADAjavieraAún no hay calificaciones
- Acta n2 Evaluacion Segundo Periodo 2022Documento5 páginasActa n2 Evaluacion Segundo Periodo 2022Camilo Cuellar RicoAún no hay calificaciones
- Trabajo Academico 3 Grupal TGSDocumento5 páginasTrabajo Academico 3 Grupal TGSJared Joel Ramos RosalesAún no hay calificaciones
- Guia de Secado y PreservadoDocumento103 páginasGuia de Secado y Preservadonataly9530Aún no hay calificaciones
- Cultivo Del GirasolDocumento8 páginasCultivo Del GirasolOscar Inclan Cespedes100% (1)
- Ensayo, Startup o EmprendimientoDocumento1 páginaEnsayo, Startup o Emprendimientomichael huaman floresAún no hay calificaciones
- Mapa Conceptual Del Procedimiento Oficioso y A Peticion de ParteDocumento2 páginasMapa Conceptual Del Procedimiento Oficioso y A Peticion de ParteDANIEL BARRERA PAVONAún no hay calificaciones
- Guía Práctica #13Documento21 páginasGuía Práctica #13Paula Fernanda Valdivieso YañezAún no hay calificaciones
- Padres de La CalidadDocumento5 páginasPadres de La CalidadValery SuarezAún no hay calificaciones
- Importancia de Los Activos Intangibles NiifDocumento2 páginasImportancia de Los Activos Intangibles NiifM't ArleydisAún no hay calificaciones
- Plan Maestro de ProduccionDocumento11 páginasPlan Maestro de ProduccionAngel Antonio Diaz NaranjoAún no hay calificaciones
- Salud Ocupacional BrasilDocumento2 páginasSalud Ocupacional BrasilJhon David BarajasAún no hay calificaciones
- Ficha Tecnica Ranger p703 Julieta Rizzo GobbiDocumento15 páginasFicha Tecnica Ranger p703 Julieta Rizzo GobbiRodrigo LagorioAún no hay calificaciones
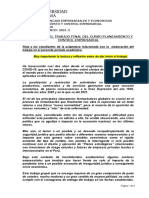
- Planeam. y Control Emp. UlimaDocumento8 páginasPlaneam. y Control Emp. UlimaKassandra J. GalvezAún no hay calificaciones
- La Relaciòn JurìdicaDocumento15 páginasLa Relaciòn JurìdicaJavier AscanioAún no hay calificaciones
- Tgam Cay 1Documento4 páginasTgam Cay 1Daniel VelaAún no hay calificaciones
- MAPA-RESOLUCION #126-98-ORLC/TR Lima, 26 de Marzo de 1998Documento1 páginaMAPA-RESOLUCION #126-98-ORLC/TR Lima, 26 de Marzo de 1998Eriks Gomez100% (1)
- Campaña Actividad 8Documento11 páginasCampaña Actividad 8heiderAún no hay calificaciones
- Antojo de ArequipeDocumento29 páginasAntojo de ArequipeLUISA JIMÉNEZAún no hay calificaciones
- 6 - 4 - Ventilacion RiteDocumento17 páginas6 - 4 - Ventilacion RiteJosé Manuel Cerezo SánchezAún no hay calificaciones
- Lab N°4 MRUVDocumento3 páginasLab N°4 MRUVSebastian Castillo Vill100% (2)