También podría gustarte
- Resumen PeliculaDocumento1 páginaResumen PeliculaEdison TubonAún no hay calificaciones
- Teoria A La ConduccionDocumento6 páginasTeoria A La ConduccionEdison TubonAún no hay calificaciones
- ProteccionesDocumento6 páginasProteccionesEdison TubonAún no hay calificaciones
- Resumen Manual de Respeto Al BiciusuarioDocumento6 páginasResumen Manual de Respeto Al BiciusuarioEdison Tubon100% (1)
- AntecedentesDocumento1 páginaAntecedentesEdison TubonAún no hay calificaciones
- Coordinacion de Aislamiento - ConclusionDocumento12 páginasCoordinacion de Aislamiento - ConclusionEdison TubonAún no hay calificaciones
- Tesis Formato NuevoDocumento118 páginasTesis Formato NuevoEdison TubonAún no hay calificaciones
- Cenace Informe2015Documento184 páginasCenace Informe2015Carlos SamaniegoAún no hay calificaciones
- Cambio de BaseDocumento1 páginaCambio de BaseEdison TubonAún no hay calificaciones
- Que Es Alto VoltajeDocumento5 páginasQue Es Alto VoltajeEdison TubonAún no hay calificaciones
- Regla Men ToDocumento3 páginasRegla Men ToEdison TubonAún no hay calificaciones
- Pliego Se Movil VdefDocumento257 páginasPliego Se Movil VdefEdison TubonAún no hay calificaciones
- Trabajo Practico PDFDocumento9 páginasTrabajo Practico PDFEdison TubonAún no hay calificaciones
- Despacho EconómicoDocumento5 páginasDespacho EconómicoEdison TubonAún no hay calificaciones
- Despacho EconómicoDocumento5 páginasDespacho EconómicoEdison TubonAún no hay calificaciones
- Plan de Desarrollo Concertado Del Distrito de Aucallama 2012Documento29 páginasPlan de Desarrollo Concertado Del Distrito de Aucallama 2012dygie311013Aún no hay calificaciones
- Sesión-De-Aprendizaje-Sistema DigestivoDocumento6 páginasSesión-De-Aprendizaje-Sistema DigestivoCésar Fernández CastilloAún no hay calificaciones
- Clase de Urgencias Subjetivas (Agus)Documento30 páginasClase de Urgencias Subjetivas (Agus)Jimena OrtizAún no hay calificaciones
- Uncion para Derrivar GigantesDocumento2 páginasUncion para Derrivar GigantesMaría Del Rosario PerezAún no hay calificaciones
- Actualizacion EspDocumento7 páginasActualizacion EspLis Borda MuñozAún no hay calificaciones
- Informe Kis de AlimentacionDocumento5 páginasInforme Kis de AlimentacionValezhita VDAún no hay calificaciones
- MateriaDocumento2 páginasMateriaEdson Luis Egusquiza CordovaAún no hay calificaciones
- Folleto Autoestima 2020 PDFDocumento2 páginasFolleto Autoestima 2020 PDFGiro 360 gradosAún no hay calificaciones
- CASO CLINICO SARAI VerdaderoDocumento35 páginasCASO CLINICO SARAI VerdaderoNeidy RojasAún no hay calificaciones
- KlebsiellaDocumento8 páginasKlebsiellaEstefania MaldonadoAún no hay calificaciones
- Modalidades de Graduación Utm 2016Documento9 páginasModalidades de Graduación Utm 2016Brigitte BarreraAún no hay calificaciones
- Educación A Los Hijos-BibliaDocumento5 páginasEducación A Los Hijos-BibliaJuan Gabriel PiedraAún no hay calificaciones
- Consenso ArraysDocumento178 páginasConsenso ArraysFrancisco José VillanuevaAún no hay calificaciones
- Rotura UterinaDocumento10 páginasRotura UterinachiazzaroAún no hay calificaciones
- Victor - Ortega - Tarea 3Documento5 páginasVictor - Ortega - Tarea 3Victor Ortega CabezasAún no hay calificaciones
- Presentacion Sobre Principios Basicos Sobre MedicamentosDocumento39 páginasPresentacion Sobre Principios Basicos Sobre MedicamentosJennifer Alegria Vergara100% (1)
- Busqueda Inteligente PDFDocumento18 páginasBusqueda Inteligente PDFEric Leonardo Salazar ChocAún no hay calificaciones
- Jesus by Benedicto XVIDocumento17 páginasJesus by Benedicto XVIBlanca E. Aranguren G.Aún no hay calificaciones
- Basil-La Historia Empezo en AfricaDocumento164 páginasBasil-La Historia Empezo en AfricaJosué BeltránAún no hay calificaciones
- Ejercicios Resueltos de Integrales Definidas e Indefinidas 1Documento15 páginasEjercicios Resueltos de Integrales Definidas e Indefinidas 1Anonymous vHt2HGCj33% (3)
- UCIDocumento30 páginasUCIÁngel Josué Aguirre Morán100% (1)
- CUESTIONARIOSDocumento9 páginasCUESTIONARIOSMARIA ALEJANDRA URREGO VARGASAún no hay calificaciones
- El BautismoDocumento2 páginasEl BautismoDaniel AbreuAún no hay calificaciones
- 2 Auditoria Mi Basura y YoDocumento4 páginas2 Auditoria Mi Basura y YoAndrés Gómez GómezAún no hay calificaciones
- Semana 3 - LA PSICOLOGÍA COMO CIENCIA 2023Documento33 páginasSemana 3 - LA PSICOLOGÍA COMO CIENCIA 2023VERONICA HUAYCOCHEAAún no hay calificaciones
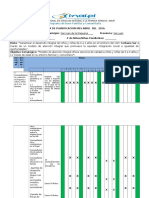
- Matriz para Planificacion Mensual Cafi Mes de Abril 2016Documento6 páginasMatriz para Planificacion Mensual Cafi Mes de Abril 2016pavel_alc100% (1)
- Lectura 02 - 6 Principios de Negociación InternacionalDocumento3 páginasLectura 02 - 6 Principios de Negociación InternacionalJUAN MIGUEL CERRO OLAYAAún no hay calificaciones
- CancionesDocumento5 páginasCancionesgaloima26Aún no hay calificaciones
- 1 Unt Examen Admisión 2013Documento5 páginas1 Unt Examen Admisión 2013Luis Castilla MoranAún no hay calificaciones
- Madurez EscolarDocumento11 páginasMadurez EscolarMarce Caris100% (2)