También podría gustarte
- 8 Compromisos PAT 2015 CIRCADocumento6 páginas8 Compromisos PAT 2015 CIRCAXXXFHERXXXAún no hay calificaciones
- Seccion de FlotacionDocumento9 páginasSeccion de FlotacionXXXFHERXXXAún no hay calificaciones
- Informe de Turbina PeltonDocumento24 páginasInforme de Turbina PeltonSolorzano Chuquimantari Joubert100% (12)
- ESLINGASDocumento5 páginasESLINGASXXXFHERXXX100% (1)
- LeonDocumento5 páginasLeonXXXFHERXXXAún no hay calificaciones
- SESION 11 - Ejercicios de Cinematica de MecanismosDocumento9 páginasSESION 11 - Ejercicios de Cinematica de MecanismosXXXFHERXXXAún no hay calificaciones
- T12 Tareas de PrealineamientoDocumento6 páginasT12 Tareas de PrealineamientoXXXFHERXXXAún no hay calificaciones
- Impacto Ambiental Del Uso de Sustancias RefrigerantesDocumento11 páginasImpacto Ambiental Del Uso de Sustancias RefrigerantesXXXFHERXXXAún no hay calificaciones
- LAB 03-2019-1 Luis SancaDocumento12 páginasLAB 03-2019-1 Luis SancaXXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria FarmaceuticaDocumento9 páginasRefrigeracion en La Industria FarmaceuticaXXXFHERXXXAún no hay calificaciones
- Informe Lab. 6Documento16 páginasInforme Lab. 6XXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria Farmaceutica y PetroquimicaDocumento10 páginasRefrigeracion en La Industria Farmaceutica y PetroquimicaXXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria Farmaceutica y PetroquimicaDocumento10 páginasRefrigeracion en La Industria Farmaceutica y PetroquimicaXXXFHERXXXAún no hay calificaciones
- Lab 2 RefirgeracionDocumento9 páginasLab 2 RefirgeracionXXXFHERXXXAún no hay calificaciones
- Laboratorio 2 Estructuras MetalicasDocumento4 páginasLaboratorio 2 Estructuras MetalicasXXXFHERXXXAún no hay calificaciones
- Estratégica Del MantenimientoDocumento13 páginasEstratégica Del MantenimientoXXXFHERXXXAún no hay calificaciones
- 10.revista Canadiense de Educacin Cientfica Matemtica y Tecnolgica - En.esDocumento18 páginas10.revista Canadiense de Educacin Cientfica Matemtica y Tecnolgica - En.esarmando antonio ramirez perezAún no hay calificaciones
- Sellador 415Documento2 páginasSellador 415Diego GallardoAún no hay calificaciones
- Share PT Serv Tech RefDocumento792 páginasShare PT Serv Tech RefGabriel VillayzanAún no hay calificaciones
- Guía 8° y Ticket Comprensión Lectora 13Documento2 páginasGuía 8° y Ticket Comprensión Lectora 13CristalAún no hay calificaciones
- Metodos para Analisis de Datos CineticosDocumento52 páginasMetodos para Analisis de Datos Cineticoschkln_13100% (2)
- RFC TDM991012M33: TA2000 CFDI de NóminaDocumento2 páginasRFC TDM991012M33: TA2000 CFDI de Nóminajesus.gerson.1996Aún no hay calificaciones
- PepsicoDocumento21 páginasPepsicoDayanaLiraSilvánAún no hay calificaciones
- Ciclo Celular (Mitosis y Meiosis)Documento58 páginasCiclo Celular (Mitosis y Meiosis)tito.castilloAún no hay calificaciones
- Ay 104Documento1 páginaAy 104Samuel Amilcar Infante LevaAún no hay calificaciones
- Dir3 CodigosDocumento76 páginasDir3 Codigospew pewAún no hay calificaciones
- El Computo MetricoDocumento20 páginasEl Computo MetricoAlan HuellAún no hay calificaciones
- Evidencia AA3 Ev2 Documento Simulacion de PILADocumento6 páginasEvidencia AA3 Ev2 Documento Simulacion de PILAyulieth contreras perez0% (1)
- Caso Gestión de InventariosDocumento4 páginasCaso Gestión de InventariosMaria FonsecaAún no hay calificaciones
- 4.matriz de Evaluacion 2016Documento12 páginas4.matriz de Evaluacion 2016fernando horna palominoAún no hay calificaciones
- Motor Stirling TerminadoDocumento19 páginasMotor Stirling TerminadoAdriana Leiva DezaAún no hay calificaciones
- Trabajo en Word. Red Social InstagramDocumento3 páginasTrabajo en Word. Red Social Instagramnaibely zambranoAún no hay calificaciones
- Resolución 2183 de 2004Documento2 páginasResolución 2183 de 2004miguel_espejo_6Aún no hay calificaciones
- Acta de DesistimientoDocumento2 páginasActa de Desistimientoivan100% (2)
- UIIX-Brochure Doctorado en Educacion e InnovacionDocumento11 páginasUIIX-Brochure Doctorado en Educacion e InnovacionLuz EcheverriaAún no hay calificaciones
- Anexo #7 Informe Auditoría Metalmecanica RR S.A.SDocumento4 páginasAnexo #7 Informe Auditoría Metalmecanica RR S.A.Szulay katherine torres moreno100% (1)
- Formatos Carta Exclusividad y Compromiso Edd2013Documento2 páginasFormatos Carta Exclusividad y Compromiso Edd2013Francisco Armando Payan Guerrero0% (1)
- Herramientas para El Líder Del ProyectoDocumento4 páginasHerramientas para El Líder Del ProyectoMarielena Surco ApazaAún no hay calificaciones
- Tratamiento de Aguas Residuales-1Documento21 páginasTratamiento de Aguas Residuales-1Carlos Efrain Poot TzucAún no hay calificaciones
- Las Diferentes Sociedades ComercialesDocumento2 páginasLas Diferentes Sociedades Comercialeskatherine lirianoAún no hay calificaciones
- Desclasificados García GutiérrezDocumento84 páginasDesclasificados García GutiérrezCarlos Mario RodríguezAún no hay calificaciones
- Sesión de AprendizajeDocumento2 páginasSesión de Aprendizajeflavio sene senciaAún no hay calificaciones
- 39-Scania - Diagnostico Electronico Mediante Panel PanelDocumento51 páginas39-Scania - Diagnostico Electronico Mediante Panel PanelNeo Fio100% (1)
- Como Desarrollar El FacultamientoDocumento11 páginasComo Desarrollar El FacultamientoDamaris VallejoAún no hay calificaciones
- Enlace QuimicoDocumento46 páginasEnlace QuimicoAna Nayde ChristopherAún no hay calificaciones
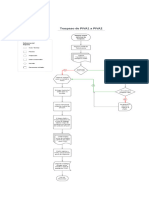
- Procesos de Envios de PIVA1 A PIVA2Documento1 páginaProcesos de Envios de PIVA1 A PIVA2casa.maravillas273Aún no hay calificaciones