También podría gustarte
- Guia de Estructura de DatosDocumento64 páginasGuia de Estructura de DatosCielo Huamani AiquipaAún no hay calificaciones
- Caso Práctico Complejidad 2016Documento4 páginasCaso Práctico Complejidad 2016Cielo Huamani Aiquipa100% (1)
- Tema 2Documento27 páginasTema 2Yemi Quispe GuillenAún no hay calificaciones
- Los Lenguajes de ProgramacionDocumento9 páginasLos Lenguajes de ProgramacionCielo Huamani AiquipaAún no hay calificaciones
- Tesis Alejandro Adrian IglesiasDocumento193 páginasTesis Alejandro Adrian IglesiasJuan Carlos MatiasAún no hay calificaciones
- Algoritmica III Guia N5 PDFDocumento5 páginasAlgoritmica III Guia N5 PDFCielo Huamani AiquipaAún no hay calificaciones
- Manula de WinqsbDocumento156 páginasManula de Winqsbdestruction87100% (26)
- EjerciciosDocumento6 páginasEjerciciosCielo Huamani AiquipaAún no hay calificaciones
- Tema 2Documento27 páginasTema 2Yemi Quispe GuillenAún no hay calificaciones
- INFORME200901 Fisica IDocumento87 páginasINFORME200901 Fisica IWilliam TaipeAún no hay calificaciones
- Ejercicios Propuestos y Resueltos en CPPDocumento11 páginasEjercicios Propuestos y Resueltos en CPPManuel Cerrato Jordán0% (2)
- Ejercicios Propuestos y Resueltos en CPPDocumento5 páginasEjercicios Propuestos y Resueltos en CPPCielo Huamani AiquipaAún no hay calificaciones
- Java BeansDocumento25 páginasJava BeansCielo Huamani AiquipaAún no hay calificaciones
- Tecnologia CaseDocumento20 páginasTecnologia CaseOscar Pérez NotarioAún no hay calificaciones
- Fisica I Leyva Solucionario Parte Ii PDFDocumento44 páginasFisica I Leyva Solucionario Parte Ii PDFCielo Huamani AiquipaAún no hay calificaciones
- Ejercicios JavaDocumento4 páginasEjercicios JavaCielo Huamani AiquipaAún no hay calificaciones
- Scientia Et Technica 0122-1701: Issn: Scientia@utp - Edu.coDocumento9 páginasScientia Et Technica 0122-1701: Issn: Scientia@utp - Edu.coCielo Huamani AiquipaAún no hay calificaciones
- Cuestionario Diagnóstico - BÁSICODocumento40 páginasCuestionario Diagnóstico - BÁSICOCielo Huamani AiquipaAún no hay calificaciones
- Algoritmia II: Arreglos, funciones, estructuras y archivosDocumento8 páginasAlgoritmia II: Arreglos, funciones, estructuras y archivosCielo Huamani AiquipaAún no hay calificaciones
- Fisica I Leyva Solucionario Parte II PDFDocumento16 páginasFisica I Leyva Solucionario Parte II PDFCielo Huamani AiquipaAún no hay calificaciones
- Is401 Algoritmica IIIDocumento5 páginasIs401 Algoritmica IIICielo Huamani AiquipaAún no hay calificaciones
- Fundamentosdebasededatos1a 140312200152 Phpapp01Documento17 páginasFundamentosdebasededatos1a 140312200152 Phpapp01Cielo Huamani AiquipaAún no hay calificaciones
- Problemas FisicaDocumento151 páginasProblemas FisicaRaul Mejia100% (2)
- Ejercicios de Complejidad de Algoritmos PDFDocumento2 páginasEjercicios de Complejidad de Algoritmos PDFCielo Huamani AiquipaAún no hay calificaciones
- Java Orientado A ObjetosDocumento119 páginasJava Orientado A Objetosricajav777Aún no hay calificaciones
- Clases de Complejidad Por EOR PDFDocumento33 páginasClases de Complejidad Por EOR PDFyemerAún no hay calificaciones
- Silabo - Algoritmica I-1Documento4 páginasSilabo - Algoritmica I-1Cielo Huamani AiquipaAún no hay calificaciones
- Problemas Selectos de Fisica UniversitariaDocumento114 páginasProblemas Selectos de Fisica UniversitariaThomas Villarreal88% (65)
- Caso Práctico Complejidad 2016Documento4 páginasCaso Práctico Complejidad 2016Cielo Huamani Aiquipa100% (1)
- ORDOVICICODocumento35 páginasORDOVICICOHenry Gonzales YanaAún no hay calificaciones
- Sobre El Sentimiento de RespetoDocumento19 páginasSobre El Sentimiento de RespetoJ Carlos Vásquez MolinaAún no hay calificaciones
- Catalogo Sol Ups 5048WM EspDocumento2 páginasCatalogo Sol Ups 5048WM EspVAL TECHAún no hay calificaciones
- Resumen E Ideas Centrales de Gaudium Et SpesDocumento2 páginasResumen E Ideas Centrales de Gaudium Et SpesOscar Lara HernandezAún no hay calificaciones
- Clasificación Geomecánica de Roca en Minería SubterráneaDocumento16 páginasClasificación Geomecánica de Roca en Minería SubterráneaRerynaldo Willam Huchamaco AlanocaAún no hay calificaciones
- AdmisiónDocumento4 páginasAdmisiónVane LdsmaAún no hay calificaciones
- Informe de Practicas 01Documento21 páginasInforme de Practicas 01Sheila Yulissa Torres VillafaneAún no hay calificaciones
- Práctica 1 RDRDocumento5 páginasPráctica 1 RDRBryan Iza EspinosaAún no hay calificaciones
- Farmacología Del CáncerDocumento32 páginasFarmacología Del CáncerdiaramosAún no hay calificaciones
- Elementos de Ecología Urbana - Virginio BettiniDocumento25 páginasElementos de Ecología Urbana - Virginio BettiniChristian Cerinza100% (4)
- MEGATENDENCIADocumento15 páginasMEGATENDENCIAjazminAún no hay calificaciones
- Trabalenguas 1Documento2 páginasTrabalenguas 1Piter CapiaAún no hay calificaciones
- PeligroDocumento1 páginaPeligroAlexander NavarroAún no hay calificaciones
- Bombas Dosificadoras Procesos Motora Catalogo de Productos ProMinent 2015 Folio 3Documento208 páginasBombas Dosificadoras Procesos Motora Catalogo de Productos ProMinent 2015 Folio 3miguelAún no hay calificaciones
- Actividad 2Documento3 páginasActividad 2Nacho Cuequero FigueroaAún no hay calificaciones
- El Brindis de Kosmos 7Documento7 páginasEl Brindis de Kosmos 7Rls Kosmos SieteAún no hay calificaciones
- Disartria. Práctica Basada en La Evidencia y Guías de Práctica ClínicaDocumento14 páginasDisartria. Práctica Basada en La Evidencia y Guías de Práctica ClínicaDaniela García ZavalaAún no hay calificaciones
- Ecologia en Bolivia PDFDocumento47 páginasEcologia en Bolivia PDFAlbert Yabeta AzaedaAún no hay calificaciones
- Caracteristicas Estáticas de Los SensoresDocumento13 páginasCaracteristicas Estáticas de Los SensoresFabricio Veintimilla BautistaAún no hay calificaciones
- Resumen El Origen de La Familia La Propiedad Privada y El EstadoDocumento18 páginasResumen El Origen de La Familia La Propiedad Privada y El EstadoPablo Daniel Laguado100% (1)
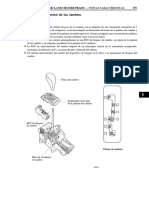
- Mecanismo de Control de Los Cambios: Land Cruiser/ Land Cruiser Prado - Nuevas Caracteristicas 201Documento3 páginasMecanismo de Control de Los Cambios: Land Cruiser/ Land Cruiser Prado - Nuevas Caracteristicas 201urielferAún no hay calificaciones
- Rosalia Perez L: Rmu: 55130 04-09-08 XAXX-010101 001 CFEDocumento2 páginasRosalia Perez L: Rmu: 55130 04-09-08 XAXX-010101 001 CFEbrian leyAún no hay calificaciones
- Mushinron No Catharsis, Recopilación 2Documento92 páginasMushinron No Catharsis, Recopilación 2Aiz WallesteinAún no hay calificaciones
- Copia de Caracterizacion Del RiesgosDocumento4 páginasCopia de Caracterizacion Del Riesgosvigal vigalAún no hay calificaciones
- Manual de Uso y Mantenimiento de Caldera Titan 500.Documento50 páginasManual de Uso y Mantenimiento de Caldera Titan 500.Carlos IbarraAún no hay calificaciones
- Dios te ama y quiere hijos no esclavosDocumento41 páginasDios te ama y quiere hijos no esclavosHeri Balderas100% (2)
- Laboratorio 9Documento18 páginasLaboratorio 9María MichelleAún no hay calificaciones
- MedicoModerno y FuturoMatasanoDocumento1200 páginasMedicoModerno y FuturoMatasanoValentina Guimaraens86% (43)
- Ficha Socioambiental SSJN 3-1 Ronda Colombia 2021Documento10 páginasFicha Socioambiental SSJN 3-1 Ronda Colombia 2021renewcol sasAún no hay calificaciones