También podría gustarte
- Solucionario de CariDocumento5 páginasSolucionario de CariOmar Antony Julca CalleAún no hay calificaciones
- Mina Chuquicamata-Tuneles y Movimiento de TierrasDocumento20 páginasMina Chuquicamata-Tuneles y Movimiento de TierrasOmar Antony Julca CalleAún no hay calificaciones
- ActorDocumento10 páginasActorOmar Antony Julca CalleAún no hay calificaciones
- Voladura Con Detonadores ElectrónicosDocumento145 páginasVoladura Con Detonadores ElectrónicosOmar Antony Julca CalleAún no hay calificaciones
- Mineria Informal ArequipaDocumento9 páginasMineria Informal ArequipaOmar Antony Julca CalleAún no hay calificaciones
- Apunte Mineria Rajo AbiertoDocumento186 páginasApunte Mineria Rajo AbiertoJuan Carlos Taipe QuispeAún no hay calificaciones
- Calculo de Ventilacion ForzadaDocumento52 páginasCalculo de Ventilacion ForzadaOmar Antony Julca CalleAún no hay calificaciones
- Monta Cerdo SDocumento9 páginasMonta Cerdo SOmar Antony Julca Calle0% (1)
- Voladura Controlada en BancosDocumento41 páginasVoladura Controlada en BancosOmar Antony Julca CalleAún no hay calificaciones
- Ave Sin NidoDocumento13 páginasAve Sin NidoOmar Antony Julca CalleAún no hay calificaciones
- Discurso Del LiderDocumento4 páginasDiscurso Del LiderOmar Antony Julca Calle50% (2)
- Apatito Mineral FinalDocumento19 páginasApatito Mineral FinalOmar Antony Julca CalleAún no hay calificaciones
- Apéndice D FINISHDocumento15 páginasApéndice D FINISHDairo SantosAún no hay calificaciones
- Qué Son Los Carbones Del Motor de ArranqueDocumento2 páginasQué Son Los Carbones Del Motor de ArranquejohnAún no hay calificaciones
- Motor ElectricoDocumento13 páginasMotor ElectricoEMIL VILLANUEVA JUSTOAún no hay calificaciones
- Practica Motor Con LataDocumento3 páginasPractica Motor Con Lataantoniomh188Aún no hay calificaciones
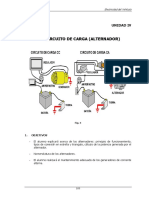
- Circuito de Carga (Alternador)Documento18 páginasCircuito de Carga (Alternador)HugoAún no hay calificaciones
- Revisión y Mantenimiento de Mecanismos de CDDocumento3 páginasRevisión y Mantenimiento de Mecanismos de CDMonica MooreAún no hay calificaciones
- Introducción Al Control Del Motor CC Sin EscobillasDocumento28 páginasIntroducción Al Control Del Motor CC Sin EscobillasNoe SantiagoAún no hay calificaciones
- Chapter 3 SADocumento158 páginasChapter 3 SALanzziano FredyAún no hay calificaciones
- Diseño y Control Con PLCDocumento80 páginasDiseño y Control Con PLCLeonardo González100% (2)
- Presentación Sistema de CargaDocumento80 páginasPresentación Sistema de CargaJuan Pablo EspitiaAún no hay calificaciones
- Manual de Operacion k3000Documento20 páginasManual de Operacion k3000Edwin Rivas RomeroAún no hay calificaciones
- Sistema Arranque ToyotaDocumento12 páginasSistema Arranque ToyotaMELVAAún no hay calificaciones
- Resumen Libro Base de 137 A 139Documento4 páginasResumen Libro Base de 137 A 139Fernando AndradeAún no hay calificaciones
- Aspectos Constructivos de Un Generador Hecho Por Silvia Ignacio y Cristhian GuarachiDocumento11 páginasAspectos Constructivos de Un Generador Hecho Por Silvia Ignacio y Cristhian GuarachiAnet Bemitez0% (1)
- Clase #14 - Maquinas CC (Fundamentos)Documento40 páginasClase #14 - Maquinas CC (Fundamentos)Diego Rodrigo Caballero PalaciosAún no hay calificaciones
- Como Diagnosticar Fallas y Reparar Un AlternadorDocumento15 páginasComo Diagnosticar Fallas y Reparar Un AlternadorConforempresarialLatinoamérica100% (2)
- Curso Electricidad Capitulo 5Documento36 páginasCurso Electricidad Capitulo 5Francisco Javier BeroizAún no hay calificaciones
- BH Manual NeoDocumento103 páginasBH Manual NeocrlscfntsslsAún no hay calificaciones
- Maquinas DCDocumento7 páginasMaquinas DCdafneAún no hay calificaciones
- Guía 3 de Aprendizaje Mantenimiento Inspeccion de EsmerilDocumento2 páginasGuía 3 de Aprendizaje Mantenimiento Inspeccion de EsmerilGonzalo VillalobosAún no hay calificaciones
- Introducion Al Mantenimiento y ReparacionDocumento46 páginasIntroducion Al Mantenimiento y ReparacionJorge BolivarAún no hay calificaciones
- Pets-Ant-Man-07 Mantenimiento de LocomotorasDocumento5 páginasPets-Ant-Man-07 Mantenimiento de LocomotorasJersonAún no hay calificaciones
- Motores Primarios (Completo)Documento120 páginasMotores Primarios (Completo)san_sano50% (2)
- MCC en Derivacion e IndependienteDocumento19 páginasMCC en Derivacion e IndependienteRosermideReyesAún no hay calificaciones
- Como Funciona Hasta Como Reparar Un ArranqueDocumento9 páginasComo Funciona Hasta Como Reparar Un ArranqueCervecero WalterAún no hay calificaciones
- Unidad 4 MOTORES DE CADocumento20 páginasUnidad 4 MOTORES DE CARamon TorresAún no hay calificaciones
- CarburadorDocumento5 páginasCarburadorJorge CalanchaAún no hay calificaciones
- Act.3 - Devanado de GrammeDocumento5 páginasAct.3 - Devanado de GrammeluchogomezawbAún no hay calificaciones
- Motores Electricos de Media y Alta TencionDocumento20 páginasMotores Electricos de Media y Alta TencionCarlos Andres Fuentes BahamondesAún no hay calificaciones