También podría gustarte
- TermodinamicaDocumento18 páginasTermodinamicaPaula Azuaje33% (3)
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Cálculo TensorialDocumento20 páginasCálculo TensorialHenry Chavez RojasAún no hay calificaciones
- Tp1 2012 Problemas Resueltos-1Documento6 páginasTp1 2012 Problemas Resueltos-1elpancasero77100% (1)
- Resolución de Ejercicios Propuestos Harry Nara EstáticaDocumento11 páginasResolución de Ejercicios Propuestos Harry Nara EstáticaAna Cristina Villalba100% (3)
- LMF Pract.7 Punto de Operacion de Una Bomba CentrifugaDocumento6 páginasLMF Pract.7 Punto de Operacion de Una Bomba CentrifugaHectorFernandoArcosPerez100% (2)
- Expansión Fourier Navier-StokesDocumento8 páginasExpansión Fourier Navier-StokesFrancisco CastroAún no hay calificaciones
- Ejercicios de Variable Compleja PDFDocumento6 páginasEjercicios de Variable Compleja PDFalex240574Aún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1Ricardo AlejosAún no hay calificaciones
- El Tensor de DeformacionesDocumento16 páginasEl Tensor de DeformacionesAMYNNXXXXAún no hay calificaciones
- Lab Metodo de Biseccion PDFDocumento7 páginasLab Metodo de Biseccion PDFCamilo Andres Mora SantiagoAún no hay calificaciones
- Tarea 2Documento4 páginasTarea 2Ricardo AlejosAún no hay calificaciones
- Enteros Modulo MDocumento17 páginasEnteros Modulo MPaul MansillaAún no hay calificaciones
- Algunos Tensores de Segundo OrdenDocumento19 páginasAlgunos Tensores de Segundo OrdenAMYNNXXXXAún no hay calificaciones
- Proyecto ESTRUCTURAS HIPERESTATICAS I PARTE II2015Documento4 páginasProyecto ESTRUCTURAS HIPERESTATICAS I PARTE II2015Caiguara Angel MiguelAún no hay calificaciones
- SilaboDocumento4 páginasSilaboJuan SamanamudAún no hay calificaciones
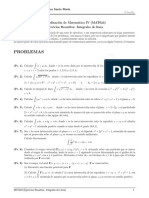
- Resueltos IntegralesDeLinea 12014Documento32 páginasResueltos IntegralesDeLinea 12014Gabriel Alonso Olmedo AlvarezAún no hay calificaciones
- Introducción Al Cálculo TensorialDocumento15 páginasIntroducción Al Cálculo TensorialAraujo Thiago100% (1)
- Cálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosDocumento29 páginasCálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosAntonio Lunasco MendozaAún no hay calificaciones
- Rcicios de Estructuras IsostáticasDocumento5 páginasRcicios de Estructuras IsostáticasAlvaro CalamaniAún no hay calificaciones
- 07-Notas de Clase-Carlos VargasDocumento65 páginas07-Notas de Clase-Carlos VargasJhonattan AlvarezAún no hay calificaciones
- Ligaduras No Holonomas y Fuerzas de LigaduraDocumento3 páginasLigaduras No Holonomas y Fuerzas de LigaduraGerman MiguelAún no hay calificaciones
- Mecanica Cuantica Capitulo VII Complemento 2 Cohen-TannoudjiDocumento10 páginasMecanica Cuantica Capitulo VII Complemento 2 Cohen-TannoudjiFrancisco TorresAún no hay calificaciones
- Medidas ExterioresDocumento10 páginasMedidas Exteriorespanickdiego100% (1)
- Euler PDFDocumento7 páginasEuler PDFAnonymous 3N1ywmnAún no hay calificaciones
- Concavidad y Convexidad Grupo 8Documento8 páginasConcavidad y Convexidad Grupo 8Maycol RamirezAún no hay calificaciones
- AJUSTESDocumento11 páginasAJUSTESAna Gabriela AlbaAún no hay calificaciones
- Form Mat-313Documento6 páginasForm Mat-313iran choque100% (1)
- Problemas Propuestos CinematicaDocumento19 páginasProblemas Propuestos CinematicaHiroshi Alejandro Colonia Murata100% (1)
- Diseño de Zapatas CentricasDocumento9 páginasDiseño de Zapatas CentricasZenaida Toledo MarcaAún no hay calificaciones
- Ecuaciones DiferencialesDocumento5 páginasEcuaciones DiferencialesAlex Wilfred Pumarrumi EscobarAún no hay calificaciones
- Geometria VectorialDocumento30 páginasGeometria VectorialLucas VenavidesAún no hay calificaciones
- Flexion y CorteDocumento16 páginasFlexion y CorteMiguel Angel Anarata TocoAún no hay calificaciones
- Harry Nara SolucionarioDocumento2 páginasHarry Nara Solucionariofrank peñaloza0% (4)
- Análisis MatemáticoDocumento81 páginasAnálisis MatemáticoSekioz de NiafreAún no hay calificaciones
- ExamenDocumento5 páginasExamenJosue Paye ChipanaAún no hay calificaciones
- Superficies Regulares Planos Tangentes y Normales-1Documento21 páginasSuperficies Regulares Planos Tangentes y Normales-1edesmitAún no hay calificaciones
- Mgne U2 A2Documento1 páginaMgne U2 A2Josuè Priego SanabriaAún no hay calificaciones
- Silabo - Análisis de La Variable ComplejaDocumento7 páginasSilabo - Análisis de La Variable ComplejaJohn Enrique Tinoco RojasAún no hay calificaciones
- Los Cinco Estados de La Materia (Condensado de Bose - Einstein)Documento11 páginasLos Cinco Estados de La Materia (Condensado de Bose - Einstein)Arturo Casas IIAún no hay calificaciones
- 02 Apuntes 18-19 CombinatoriaDocumento31 páginas02 Apuntes 18-19 CombinatoriaynfyAún no hay calificaciones
- Producto TensorialDocumento5 páginasProducto Tensorialrogelio825Aún no hay calificaciones
- Ejercicios Resueltos Introducción Al Calculo TensorialDocumento90 páginasEjercicios Resueltos Introducción Al Calculo TensorialKAGGHGAún no hay calificaciones
- Tensor EsfuerzosDocumento15 páginasTensor EsfuerzosDiego Castillo JaramilloAún no hay calificaciones
- Apuntes Sobre Estructuras IsostáticasDocumento1772 páginasApuntes Sobre Estructuras IsostáticasjocksanAún no hay calificaciones
- Primer Parcial de MAT 313 I 2021 G1 G2Documento1 páginaPrimer Parcial de MAT 313 I 2021 G1 G2Cisneros Armata Edwin WillyAún no hay calificaciones
- Introduccion Al Analisis Convexo - Pedro GajardoDocumento37 páginasIntroduccion Al Analisis Convexo - Pedro GajardoJuancarlosAún no hay calificaciones
- Apuntes de FuncionesDocumento11 páginasApuntes de FuncionesStephanie Rojas CancinoAún no hay calificaciones
- Geometrıa ComputacionalDocumento17 páginasGeometrıa ComputacionalAmIn20122Aún no hay calificaciones
- Mapeos Variable ComplejaDocumento4 páginasMapeos Variable ComplejaYerson VelandiaAún no hay calificaciones
- Clase Nº9, Resolucion Practica Nº3Documento5 páginasClase Nº9, Resolucion Practica Nº3Mario EstradaEspinozaAún no hay calificaciones
- Vectores y TensoresDocumento13 páginasVectores y Tensoresjackman_123Aún no hay calificaciones
- Ecuaciones DiferencialesDocumento39 páginasEcuaciones DiferencialesHector TineoAún no hay calificaciones
- Movimiento Vibratorio AmortiguadoDocumento4 páginasMovimiento Vibratorio AmortiguadoLuiz F Alarcon RojasAún no hay calificaciones
- AE+1+Metodo de Cuarta Integración 13 AGODocumento23 páginasAE+1+Metodo de Cuarta Integración 13 AGOAbel BenegasAún no hay calificaciones
- Teorema de La Divergencia - MaxwellDocumento9 páginasTeorema de La Divergencia - Maxwellpruebamaquinas123Aún no hay calificaciones
- Vector EsDocumento18 páginasVector EsPAUL JHERSON CARCAHUSTO TUMBILLOAún no hay calificaciones
- Tarea Examen - 1 Din Amica de Medios Deformables - Semestre 2021-1Documento11 páginasTarea Examen - 1 Din Amica de Medios Deformables - Semestre 2021-1Lex GonzálezAún no hay calificaciones
- Lineal 1 45Documento45 páginasLineal 1 45Fernando HernándezAún no hay calificaciones
- Representacion Matricial y Valores PropiosDocumento4 páginasRepresentacion Matricial y Valores PropiosGabriela María Zapata PintoAún no hay calificaciones
- Descomposición de Vectores - Grupo 5Documento6 páginasDescomposición de Vectores - Grupo 5MARCO MANZANEDAAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- Sugerencias PDFDocumento1 páginaSugerencias PDFMiguel Mamani CastroAún no hay calificaciones
- Sistema Electrico Interconectado Nacional A Dic2019 PDFDocumento1 páginaSistema Electrico Interconectado Nacional A Dic2019 PDFMiguel Mamani CastroAún no hay calificaciones
- EE354 Sílabo - Análisis de Sistemas de Potencia II - 2020-I (Rev07-04.06.20-Mba)Documento3 páginasEE354 Sílabo - Análisis de Sistemas de Potencia II - 2020-I (Rev07-04.06.20-Mba)Miguel Mamani CastroAún no hay calificaciones
- EE354 - Benchmark - Estabilidad Transitoria de Sistema Multimáquina - 2020-I PDFDocumento5 páginasEE354 - Benchmark - Estabilidad Transitoria de Sistema Multimáquina - 2020-I PDFMiguel Mamani CastroAún no hay calificaciones
- Resistencias SemiconductorasDocumento3 páginasResistencias SemiconductorasMiguel Mamani CastroAún no hay calificaciones
- Perros ZssDocumento1 páginaPerros ZssMiguel Mamani CastroAún no hay calificaciones
- Perros ZssDocumento1 páginaPerros ZssMiguel Mamani CastroAún no hay calificaciones
- Alteraciones de PiesDocumento63 páginasAlteraciones de PiesHector Arturo Gonzalez EscamillaAún no hay calificaciones
- GatosDocumento1 páginaGatosMiguel Mamani CastroAún no hay calificaciones
- ProblemasDocumento21 páginasProblemasHenry Rivas LauraAún no hay calificaciones
- GatosDocumento1 páginaGatosMiguel Mamani CastroAún no hay calificaciones
- GatoxDocumento1 páginaGatoxMiguel Mamani CastroAún no hay calificaciones
- OsciloscopiosDocumento35 páginasOsciloscopioswaltergamAún no hay calificaciones
- Arranque de MotorDocumento12 páginasArranque de MotorMiguel Mamani CastroAún no hay calificaciones
- Guía - Experimento #8Documento2 páginasGuía - Experimento #8Eder BerrocalAún no hay calificaciones
- Rectificador de Onda Completa Con Filtro LC: L LC, L 10LcDocumento2 páginasRectificador de Onda Completa Con Filtro LC: L LC, L 10LcMiguel Mamani CastroAún no hay calificaciones
- Rectificador de Onda Completa Con Filtro Por Capacidad: Resumen-El Experimento Fue Realizado paraDocumento2 páginasRectificador de Onda Completa Con Filtro Por Capacidad: Resumen-El Experimento Fue Realizado paraMiguel Mamani CastroAún no hay calificaciones
- Arranque de MotorDocumento12 páginasArranque de MotorMiguel Mamani CastroAún no hay calificaciones
- Rectificador de Onda Completa Con Filtro LC: L LC, L 10LcDocumento2 páginasRectificador de Onda Completa Con Filtro LC: L LC, L 10LcMiguel Mamani CastroAún no hay calificaciones
- Resistencias SemiconductorasDocumento3 páginasResistencias SemiconductorasMiguel Mamani CastroAún no hay calificaciones
- Guía de LaboratorioDocumento37 páginasGuía de LaboratorioMiguel Mamani CastroAún no hay calificaciones
- 3 Compara La Constante de Tiempo Calculada Con Los Valores de Los ElementosDocumento1 página3 Compara La Constante de Tiempo Calculada Con Los Valores de Los ElementosMiguel Mamani CastroAún no hay calificaciones
- RC - Integrador y Diferenciador PDFDocumento8 páginasRC - Integrador y Diferenciador PDFLuis GarciaAún no hay calificaciones
- Paper IeeeDocumento2 páginasPaper IeeeMiguel Mamani CastroAún no hay calificaciones
- Paper IeeeDocumento3 páginasPaper IeeeEdwin HerreraAún no hay calificaciones
- If6 LC1Documento10 páginasIf6 LC1Miguel Mamani CastroAún no hay calificaciones
- Informe Final 1Documento6 páginasInforme Final 1Miguel Mamani CastroAún no hay calificaciones
- Angulo SolidoDocumento47 páginasAngulo SolidoMiguel Mamani CastroAún no hay calificaciones
- Qué Es El Arc Flash?Documento12 páginasQué Es El Arc Flash?cursosrlaAún no hay calificaciones
- Ciencias Basicas Lab 2Documento15 páginasCiencias Basicas Lab 2Fabrizio AmayaAún no hay calificaciones
- Resistencias Electricas TubularesDocumento3 páginasResistencias Electricas TubularesAllan ColinaAún no hay calificaciones
- Manual Del Estudiante C175 PDFDocumento66 páginasManual Del Estudiante C175 PDFMiky Gomez100% (2)
- Proforma Honda HR-V LX 2021Documento5 páginasProforma Honda HR-V LX 2021Diony SipeAún no hay calificaciones
- Qué Es El FlujogramaDocumento4 páginasQué Es El FlujogramaCharlotte Manuela Camacho RequenaAún no hay calificaciones
- Informe Reflexivo Ingenieria de SistemasDocumento3 páginasInforme Reflexivo Ingenieria de SistemasJHON JAIDER VIAFARA AGUILARAún no hay calificaciones
- Cotización EGAS INGENIERIA SACDocumento3 páginasCotización EGAS INGENIERIA SACAldo Franco Ttica GasparAún no hay calificaciones
- Call CenterDocumento14 páginasCall CenterMar NarvaezAún no hay calificaciones
- 11 10 1 PB PDFDocumento8 páginas11 10 1 PB PDFJhonernest Berrios GallegoAún no hay calificaciones
- Alternativo Cantidad Unidad Descripción de Materiales Código ÍtemDocumento1 páginaAlternativo Cantidad Unidad Descripción de Materiales Código ÍtemCarlos Alberto Choque IbañezAún no hay calificaciones
- Economia Instalacion y Durabilidad en Sistemas de SaneamientoDocumento1 páginaEconomia Instalacion y Durabilidad en Sistemas de SaneamientoMauricioAún no hay calificaciones
- FA-PR-05 Procedimiento de ImprimacionDocumento5 páginasFA-PR-05 Procedimiento de ImprimacionCarlos ArellanoAún no hay calificaciones
- Incrustaciones de PorcelanaDocumento3 páginasIncrustaciones de PorcelanaRocio AvilaAún no hay calificaciones
- Malla de Puesta A TierraDocumento32 páginasMalla de Puesta A TierraSofía Zuluaga Gallego100% (1)
- Proyecto para Crear Un Interfaz Gráfico Paso A PasoDocumento16 páginasProyecto para Crear Un Interfaz Gráfico Paso A Pasobobesponja99Aún no hay calificaciones
- Cap. 6.0 Plan de Manejo Ambiental Final1Documento33 páginasCap. 6.0 Plan de Manejo Ambiental Final1Anonymous th0CMFAún no hay calificaciones
- Principios de Las Comunicaciones PDFDocumento580 páginasPrincipios de Las Comunicaciones PDFAlfredo VILORIA100% (1)
- MicrometroDocumento2 páginasMicrometroluis tiuquingaAún no hay calificaciones
- Oceanografía Fisica y Estudio Del MarDocumento5 páginasOceanografía Fisica y Estudio Del MarFer MedinaAún no hay calificaciones
- Quiz 1 Procesos Industriales 2Documento3 páginasQuiz 1 Procesos Industriales 2Juvenal Córdoba ValoyesAún no hay calificaciones
- La Banda TransportadoraDocumento10 páginasLa Banda TransportadoraEfrsin Gasca VázquezAún no hay calificaciones
- Trabajo Unidad 4Documento12 páginasTrabajo Unidad 4Carlos Martinez VazquezAún no hay calificaciones
- Guía 07 Calor Latente EvaporacionDocumento3 páginasGuía 07 Calor Latente EvaporacionAndres IsaacsAún no hay calificaciones
- ADocumento13 páginasATommyAún no hay calificaciones
- Declaracion de Impacto Ambiental para La Instalacion de Estacion de Servicio y Gasocentro GLPDocumento124 páginasDeclaracion de Impacto Ambiental para La Instalacion de Estacion de Servicio y Gasocentro GLPAaron PolancoAún no hay calificaciones
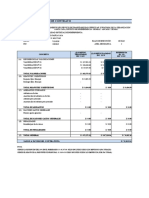
- Liquidacion Santa CasaDocumento24 páginasLiquidacion Santa CasaMarco GuimarayAún no hay calificaciones
- Practica No.3Documento5 páginasPractica No.3Odin Aguiar ArellanoAún no hay calificaciones