También podría gustarte
- Germán Samper. A dibujar se aprende dibujando.De EverandGermán Samper. A dibujar se aprende dibujando.Aún no hay calificaciones
- Ieso SampleDocumento24 páginasIeso SamplelibrostecnicosAún no hay calificaciones
- Curvas Cónicas: Geometría PlanaDocumento13 páginasCurvas Cónicas: Geometría Planastrokes142Aún no hay calificaciones
- Geometría Plana en El ArteDocumento42 páginasGeometría Plana en El ArteEddie FraserAún no hay calificaciones
- MorfometríaDocumento9 páginasMorfometríaCESAR ARMENTAAún no hay calificaciones
- Arte, Artesania y DiseñoDocumento5 páginasArte, Artesania y DiseñoKarlos Carmona100% (1)
- Tesis Doctoral Rafael Prado VelascoDocumento340 páginasTesis Doctoral Rafael Prado VelascosofiaAún no hay calificaciones
- Cuadernillo Geometria y Origami CTA 2006Documento53 páginasCuadernillo Geometria y Origami CTA 2006Vanessa Gallardo Yáñez0% (1)
- DiedricoDocumento45 páginasDiedricoTania Ibars SelmaAún no hay calificaciones
- ProporcionDocumento4 páginasProporcionKenji MagañaAún no hay calificaciones
- Gaspard Monge La Estetica de La IlustracDocumento11 páginasGaspard Monge La Estetica de La IlustracVíctor Manuel Argüello BuzónAún no hay calificaciones
- Trias - Prologo A Rykwert La Idea de Ciudad PDFDocumento10 páginasTrias - Prologo A Rykwert La Idea de Ciudad PDFMauro OrtisAún no hay calificaciones
- Geometría de Superficies Arrieta PDFDocumento166 páginasGeometría de Superficies Arrieta PDFHui TacaAún no hay calificaciones
- Categorias PDFDocumento91 páginasCategorias PDFCristian Triana GcíaAún no hay calificaciones
- Cobos Gavala Javier - Matematicas Y OrigamiDocumento25 páginasCobos Gavala Javier - Matematicas Y OrigamiLancetsrAún no hay calificaciones
- Metodología Del DiseñoDocumento28 páginasMetodología Del Diseñovicox20056207Aún no hay calificaciones
- 3taxonomia y Clasificacion de Los HongosDocumento20 páginas3taxonomia y Clasificacion de Los HongosARNALDO RICARDO CORZO BARRANCAAún no hay calificaciones
- Manual - U2 - Geometría DescriptivaDocumento62 páginasManual - U2 - Geometría DescriptivaitaloAún no hay calificaciones
- DobertiDocumento32 páginasDobertiSinging TurtleAún no hay calificaciones
- Calculo Vectorial Claudio Pita RuizDocumento16 páginasCalculo Vectorial Claudio Pita RuizMax Adherly Quispe Pino0% (2)
- TeseladosDocumento18 páginasTeseladosRobertAún no hay calificaciones
- Algebra de LieDocumento171 páginasAlgebra de LieChuy ExorAún no hay calificaciones
- Laura Devetach LibrosDocumento6 páginasLaura Devetach LibrosMaria Sol BaldoAún no hay calificaciones
- Introduccion A Las Tecnicas de DibujoDocumento36 páginasIntroduccion A Las Tecnicas de DibujoArturo de la CruzAún no hay calificaciones
- Albarracín - Evaluación Teórica PDFDocumento8 páginasAlbarracín - Evaluación Teórica PDFAlba LuzbelitiAún no hay calificaciones
- Ismos Siglo XXDocumento41 páginasIsmos Siglo XXGuinever GalvezAún no hay calificaciones
- Apuntes - T02 Geometría Plana PolígonosDocumento11 páginasApuntes - T02 Geometría Plana PolígonosAlmudena Bah Beahache MontesAún no hay calificaciones
- Relación Entre La Proporción Aurea y La Arquitectura Usada en La Torre Eiffel, CN Tower, Diseño de Casas y Distribución de EspaciosDocumento12 páginasRelación Entre La Proporción Aurea y La Arquitectura Usada en La Torre Eiffel, CN Tower, Diseño de Casas y Distribución de EspaciosBret CondoriAún no hay calificaciones
- El Papel de Las Fritas Esmaltes y ColoreDocumento105 páginasEl Papel de Las Fritas Esmaltes y Colorejojiba100% (1)
- LemG - TP. El Numero de Oro (FINAL P-Imprimir)Documento19 páginasLemG - TP. El Numero de Oro (FINAL P-Imprimir)Erwin HerreraAún no hay calificaciones
- Tema7 GeometriaDocumento16 páginasTema7 GeometriaAdrian Hernandez Cambrano100% (1)
- Hiperrealismo y Pintura MatericaDocumento12 páginasHiperrealismo y Pintura MatericaDeyvis Mendoza MoscosoAún no hay calificaciones
- Permeabilidad Felipe MesaDocumento4 páginasPermeabilidad Felipe MesaLaura Vieira MorenoAún no hay calificaciones
- Andamentos en MosaicosDocumento4 páginasAndamentos en MosaicosJose100% (1)
- Guion de Teatro."Picasso Quiere Ser Diferente"Documento6 páginasGuion de Teatro."Picasso Quiere Ser Diferente"Latasha ScottAún no hay calificaciones
- Memoria Escultura 2Documento66 páginasMemoria Escultura 2ANA PADILLA RIOSAún no hay calificaciones
- Inversion, Dibujo TécnicoDocumento2 páginasInversion, Dibujo TécnicoKenny Oñate Quiroz50% (2)
- Las Tres Marías. Thalía y El Sueño de La Blanquitud PDFDocumento9 páginasLas Tres Marías. Thalía y El Sueño de La Blanquitud PDFBenjamín Martínez C100% (1)
- El Grabado Como Inicio de Las Artes Gráficas - RamonFreireDocumento7 páginasEl Grabado Como Inicio de Las Artes Gráficas - RamonFreireSolSilvestreAún no hay calificaciones
- Janson Magia y Rito - El Arte Del Hombre PrehistoricoDocumento17 páginasJanson Magia y Rito - El Arte Del Hombre PrehistoricoVictoria Francisca Jiménez0% (1)
- Lecciones de Arquitectura Version Digital Con Enlaces Web 1Documento154 páginasLecciones de Arquitectura Version Digital Con Enlaces Web 1Cristhiam Valdivia CalderonAún no hay calificaciones
- Artículo Sobre Gillo Dorfles PDFDocumento14 páginasArtículo Sobre Gillo Dorfles PDFRicardo M. VivarAún no hay calificaciones
- DISUEÑOS, Escuela de Diseño Universidad de ValparaísoDocumento24 páginasDISUEÑOS, Escuela de Diseño Universidad de ValparaísoEduardo Abarca LuceroAún no hay calificaciones
- Forma y MetaforaDocumento59 páginasForma y Metaforalaurea_noAún no hay calificaciones
- 00 Esquemas Armonicos de Color PDFDocumento44 páginas00 Esquemas Armonicos de Color PDFKaren PattyAún no hay calificaciones
- Geometriaa Descriptiva Sistema DiédricoDocumento42 páginasGeometriaa Descriptiva Sistema DiédricomzadAún no hay calificaciones
- Dibujo de Paisaje A LápizDocumento8 páginasDibujo de Paisaje A LápizIbérico IbmmAún no hay calificaciones
- Perspectivas 01Documento20 páginasPerspectivas 01AlonsoUAAún no hay calificaciones
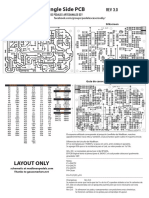
- Pearl Oc-7 Rev 3.0 Single SideDocumento1 páginaPearl Oc-7 Rev 3.0 Single SideCristobal Nicolás100% (1)
- Matemáticas 1 Secundaria Bloque 4Documento14 páginasMatemáticas 1 Secundaria Bloque 4Mercedes Rodríguez RoblesAún no hay calificaciones
- Morfología Libro - MARIO LÓPEZDocumento171 páginasMorfología Libro - MARIO LÓPEZELVIO DARIO AVILAAún no hay calificaciones
- Tema 4. Tangencias 2016-17Documento24 páginasTema 4. Tangencias 2016-17Yerko Flores MamaniAún no hay calificaciones
- B de Bauhaus 2014Documento25 páginasB de Bauhaus 2014MurielitaAún no hay calificaciones
- Vistas 1º Bac 2017 PDFDocumento16 páginasVistas 1º Bac 2017 PDFjootaceAún no hay calificaciones
- (Ex-Situ) El Artista Viajero en El Arte Contemporaneo PDFDocumento17 páginas(Ex-Situ) El Artista Viajero en El Arte Contemporaneo PDFCesar Gutierrez BolañosAún no hay calificaciones
- Fiuna 2021 Ejercitario M2 01Documento34 páginasFiuna 2021 Ejercitario M2 01Lucas CubasAún no hay calificaciones
- Morfologia TexturaDocumento3 páginasMorfologia TexturaSantiago MandileAún no hay calificaciones
- La paradoja de Mies: Las (in)visibles simetrías continuas del espacio moderno (a través del Pabellón de Barcelona)De EverandLa paradoja de Mies: Las (in)visibles simetrías continuas del espacio moderno (a través del Pabellón de Barcelona)Aún no hay calificaciones
- La Obediencia Del HijoDocumento5 páginasLa Obediencia Del Hijokiko0809Aún no hay calificaciones
- Predicarconexito PDFDocumento5 páginasPredicarconexito PDFkiko0809Aún no hay calificaciones
- B Spline No Racionales (Curvas Bezier)Documento14 páginasB Spline No Racionales (Curvas Bezier)kiko0809Aún no hay calificaciones
- Ética Teocrática o TeológicaDocumento3 páginasÉtica Teocrática o Teológicakiko080986% (7)
- Bed Bug Preparation Sheet - Spanish - #32724SP-1Documento1 páginaBed Bug Preparation Sheet - Spanish - #32724SP-1kiko0809Aún no hay calificaciones
- Principios Basicos Del NoviazgoDocumento10 páginasPrincipios Basicos Del Noviazgokiko0809Aún no hay calificaciones
- El DiezmoDocumento454 páginasEl Diezmokiko0809Aún no hay calificaciones
- El Plan Basico 2010Documento472 páginasEl Plan Basico 2010kiko0809100% (6)
- Una Carta Amistosa para Mis Amigos Adventistas Del Séptimo DíaDocumento8 páginasUna Carta Amistosa para Mis Amigos Adventistas Del Séptimo Díakiko0809Aún no hay calificaciones