También podría gustarte
- Aplicacion de Ecuaciones Diferenciales Ing. ElectronicaDocumento4 páginasAplicacion de Ecuaciones Diferenciales Ing. ElectronicaAbelAún no hay calificaciones
- AUTOMATIZACIONDocumento9 páginasAUTOMATIZACIONAbelAún no hay calificaciones
- Experiencia de LaboratorioDocumento4 páginasExperiencia de LaboratorioAbelAún no hay calificaciones
- Informe 1 - Ing ControlDocumento7 páginasInforme 1 - Ing ControlAbelAún no hay calificaciones
- Laboratorio 02Documento18 páginasLaboratorio 02AbelAún no hay calificaciones
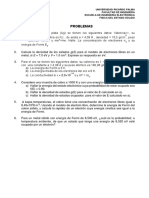
- Problemas Electrones LibresDocumento1 páginaProblemas Electrones LibresAbelAún no hay calificaciones
- Fis III 9Documento4 páginasFis III 9AbelAún no hay calificaciones
- Fis III 2Documento4 páginasFis III 2AbelAún no hay calificaciones
- Tercera Practica Calificada Urp 2014 2Documento1 páginaTercera Practica Calificada Urp 2014 2AbelAún no hay calificaciones
- Informe 4Documento18 páginasInforme 4AbelAún no hay calificaciones
- Informe 3Documento19 páginasInforme 3AbelAún no hay calificaciones
- 2da Practica Calificada Teoria Jueves Ing ElectronicaDocumento5 páginas2da Practica Calificada Teoria Jueves Ing ElectronicaAbelAún no hay calificaciones
- Proyecto de Investigacion Computacion III Ciclo Priale - Docx 1Documento11 páginasProyecto de Investigacion Computacion III Ciclo Priale - Docx 1Dayrom Huaman YocllaAún no hay calificaciones
- 40-400-8 Electricidad CFTDocumento2 páginas40-400-8 Electricidad CFTAmanita MuscariaAún no hay calificaciones
- Iso 28000Documento17 páginasIso 28000Edgar Jara GavidiaAún no hay calificaciones
- Ejecución Del Sistema Last PlannerDocumento3 páginasEjecución Del Sistema Last PlannerMichael Barbaran LealAún no hay calificaciones
- Informe Proyeccion Social PDFDocumento55 páginasInforme Proyeccion Social PDFRosa Maria Del Carmen Diaz GilAún no hay calificaciones
- CV Gerson Leon EscuderoDocumento2 páginasCV Gerson Leon Escuderokinkimono1Aún no hay calificaciones
- Fondos de Capital Privado ListadoDocumento14 páginasFondos de Capital Privado ListadoOscar Dario Villada LopezAún no hay calificaciones
- La Naturaleza de Las Tecnologías de Informacion y Comunicación: Las TIC Como Determinantes de La Organización y de La Sociedad de La InformaciónDocumento23 páginasLa Naturaleza de Las Tecnologías de Informacion y Comunicación: Las TIC Como Determinantes de La Organización y de La Sociedad de La InformaciónDiego MolinaAún no hay calificaciones
- 5 Generaciones de RobotsDocumento14 páginas5 Generaciones de RobotswaldoartdjAún no hay calificaciones
- Suma y Resta de DecimalesDocumento15 páginasSuma y Resta de DecimalesConstanza Von HausenAún no hay calificaciones
- Los Paradigm Ass e Gun Thomas KuhnDocumento13 páginasLos Paradigm Ass e Gun Thomas KuhndayannarousAún no hay calificaciones
- El Rol Estratégico de Las TicDocumento2 páginasEl Rol Estratégico de Las TicElvis Muñoz GallardoAún no hay calificaciones
- Noveno TecnologiaDocumento4 páginasNoveno TecnologiaRebecca KennedyAún no hay calificaciones
- 1 Ensayo - El Internet de Las CosasDocumento2 páginas1 Ensayo - El Internet de Las CosasGianfranco BustamanteAún no hay calificaciones
- Evolución Histórica de La Manufactura y Los Sistemas de Producción PDFDocumento7 páginasEvolución Histórica de La Manufactura y Los Sistemas de Producción PDFAlberto Luna100% (1)
- Ciencias Duras y BlandasDocumento4 páginasCiencias Duras y BlandasOctavio MoralesAún no hay calificaciones
- Casos de Aplicación de La Simulacion...Documento11 páginasCasos de Aplicación de La Simulacion...Heidy Mares Florez100% (1)
- Conferencia IATF 16949 Calidad Automotriz - Direknova PDFDocumento16 páginasConferencia IATF 16949 Calidad Automotriz - Direknova PDFSam De la CruzAún no hay calificaciones
- Resumen de Lakatos El Falsacionismo Sofisticado - UBA - CBC - Pensamiento Cientifico - CatDocumento3 páginasResumen de Lakatos El Falsacionismo Sofisticado - UBA - CBC - Pensamiento Cientifico - CatLucho de BarAún no hay calificaciones
- Aval SemilleroDocumento15 páginasAval SemilleroWILLIAM rOCHAAún no hay calificaciones
- Ing IndustrialDocumento3 páginasIng IndustrialRodolfo LucateroAún no hay calificaciones
- Guia Futuros Estudiantes ETSII UPCTDocumento32 páginasGuia Futuros Estudiantes ETSII UPCTANTONIO GIMENEZ MILLORAún no hay calificaciones
- Silabo Sistemas de Información EmpresarialDocumento3 páginasSilabo Sistemas de Información EmpresarialJohn Ascona BriceñoAún no hay calificaciones
- Principios Básicos de EscaladoDocumento106 páginasPrincipios Básicos de EscaladoDiego MoralesAún no hay calificaciones
- Organigrama ITM 2009Documento1 páginaOrganigrama ITM 2009Robert GalisteoAún no hay calificaciones
- Perfil Del Profesional de OlenkaDocumento23 páginasPerfil Del Profesional de Olenkaauditor.mintra2112Aún no hay calificaciones
- Acta de Constitucion Del ProyectoDocumento8 páginasActa de Constitucion Del ProyectoBboy music 2016Aún no hay calificaciones
- Práctica #02Documento9 páginasPráctica #02Dianira MuñozAún no hay calificaciones
- Reflexiones y Artículos de DocumentaciónDocumento738 páginasReflexiones y Artículos de DocumentaciónMaria Eugenia VelisAún no hay calificaciones