También podría gustarte
- Oscilaciones Del Sistema Masa Resorte - PreinformeDocumento8 páginasOscilaciones Del Sistema Masa Resorte - PreinformecarlosAún no hay calificaciones
- 7 Ejercicios Muchas Partículas 2021Documento6 páginas7 Ejercicios Muchas Partículas 2021Santiago MoralesAún no hay calificaciones
- Torca Y Momento de InerciaDocumento18 páginasTorca Y Momento de InerciaHelmer Jair Saldaña López100% (1)
- Movimineto ParabolicoDocumento7 páginasMovimineto ParabolicoMoMoAún no hay calificaciones
- Ejercicio TreybalDocumento14 páginasEjercicio TreybalEmilio Garcia100% (2)
- GuatecomprasDocumento20 páginasGuatecomprasEmilio GarciaAún no hay calificaciones
- Ejercicio TreybalDocumento14 páginasEjercicio TreybalEmilio Garcia100% (2)
- Equilibrio de Una Particula en Tres DimensionesDocumento6 páginasEquilibrio de Una Particula en Tres DimensionesJhon Alex Villanueva Sanchez78% (9)
- Investigación Momento InerciaDocumento2 páginasInvestigación Momento InerciaAlejandro J. B.CAún no hay calificaciones
- Momento de Inercia de Figuras Planas 1Documento7 páginasMomento de Inercia de Figuras Planas 1felix obandoAún no hay calificaciones
- Análisis CríticoDocumento8 páginasAnálisis CríticoEliMagoAún no hay calificaciones
- Momento de Inercia Diapósitivas IfDocumento8 páginasMomento de Inercia Diapósitivas IfGonzales Villavicencio MartinAún no hay calificaciones
- Practica 8 - Maquina de AtwoodDocumento11 páginasPractica 8 - Maquina de AtwoodgonzaloAún no hay calificaciones
- Cuestionario de La Unidad VIIDocumento4 páginasCuestionario de La Unidad VIIMiguel Morales CortezAún no hay calificaciones
- Informe Movimiento CircularDocumento11 páginasInforme Movimiento CircularBrian Galeano100% (1)
- Dinámica de RotaciónDocumento27 páginasDinámica de Rotacióncomar85Aún no hay calificaciones
- Equilibrio Estatico de Cuerpos RigidosDocumento38 páginasEquilibrio Estatico de Cuerpos RigidosNik Orlan Garcia Clderon50% (2)
- Reporte 2. Cuerpo Rigido TerminadoDocumento19 páginasReporte 2. Cuerpo Rigido TerminadoDaniel GómezAún no hay calificaciones
- Taller 2 Calor y OndaDocumento6 páginasTaller 2 Calor y OndaDavid Monsalve VarelaAún no hay calificaciones
- Problemas de Movimiento CircularDocumento2 páginasProblemas de Movimiento CircularDaniel RamírezAún no hay calificaciones
- Modulo de ElasticidadDocumento4 páginasModulo de ElasticidadKEVIN LIONEL YAÑEZ FUENTESAún no hay calificaciones
- Laboratorio Física Conservación de La EnergíaDocumento5 páginasLaboratorio Física Conservación de La Energíajhoan becerraAún no hay calificaciones
- Movimiento RotacionalDocumento59 páginasMovimiento RotacionalGustavoBurgos67% (3)
- Fuerzas Coplanares No Concurrentes UnicaucaDocumento3 páginasFuerzas Coplanares No Concurrentes UnicaucaJorge Andres 124Aún no hay calificaciones
- LABORATORIO Masa ResorteDocumento6 páginasLABORATORIO Masa ResorteJordan GiraldoAún no hay calificaciones
- Momentos de Areas y LineasDocumento20 páginasMomentos de Areas y LineasSergio Limaylla GonzalesAún no hay calificaciones
- Informe 8 Dinamica de Un Plano InclinadoDocumento4 páginasInforme 8 Dinamica de Un Plano InclinadoMelissa VasquezAún no hay calificaciones
- Sesión No 9 - Bastidores y MáquinasDocumento25 páginasSesión No 9 - Bastidores y MáquinasÓscar PulidoAún no hay calificaciones
- Principio de Conservacion de La EnergiaDocumento4 páginasPrincipio de Conservacion de La EnergiaRenzo Manuel Flores HoyosAún no hay calificaciones
- Radio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasDocumento11 páginasRadio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasSaussure Fer CcoriAún no hay calificaciones
- Laboratorio MruDocumento16 páginasLaboratorio Mrusealecas100% (2)
- Movimiento Circular Uniformemente AceleradoDocumento5 páginasMovimiento Circular Uniformemente AceleradoStiven AndrésAún no hay calificaciones
- Fìsica Ii - Practica 01-2014Documento2 páginasFìsica Ii - Practica 01-2014Freddy Gallo SanchezAún no hay calificaciones
- Medida Del Potencial de CeldaDocumento6 páginasMedida Del Potencial de CeldaMauro VanAún no hay calificaciones
- PRACTICA5Documento8 páginasPRACTICA5bammrsandmanAún no hay calificaciones
- Práctica 11 DESCOMPOSICIÓN DE FUERZASDocumento7 páginasPráctica 11 DESCOMPOSICIÓN DE FUERZASAlex LemaAún no hay calificaciones
- Máquina de Atwood. Josenny DiazDocumento7 páginasMáquina de Atwood. Josenny DiazJosenny Diaz OlivoAún no hay calificaciones
- Reporte 4Documento7 páginasReporte 4Erick MagallanesAún no hay calificaciones
- Ejercicios y Teoría de InerciaDocumento4 páginasEjercicios y Teoría de InerciaSteppenWolf100% (1)
- BANCO DE PREGUNTAS DE FÍSICA EjerciciosDocumento4 páginasBANCO DE PREGUNTAS DE FÍSICA EjerciciosJorge VinuezaAún no hay calificaciones
- Utn Lab Fisica Nº3Documento15 páginasUtn Lab Fisica Nº3Dany MeyerAún no hay calificaciones
- Practica 8-Fundamentos de MecanicaDocumento21 páginasPractica 8-Fundamentos de Mecanicaalan mauricio martinez dela cruzAún no hay calificaciones
- Practica Momentos Estáticos y CentroidesDocumento8 páginasPractica Momentos Estáticos y CentroidesEnrique RoblesAún no hay calificaciones
- Ley de Hooke Generalizada PDFDocumento46 páginasLey de Hooke Generalizada PDFLeonardoPugoVegaAún no hay calificaciones
- Ejercicios Solucionados de Oscilaciones y Ondas Unidad Ondas ElectromagneticasDocumento37 páginasEjercicios Solucionados de Oscilaciones y Ondas Unidad Ondas ElectromagneticasDeivid Quinde Constante0% (1)
- CUESTIONARIODocumento3 páginasCUESTIONARIOCarlos Cerron Vargas100% (1)
- Laboratorio de FuerzasDocumento8 páginasLaboratorio de FuerzasAndresFelipeChinguadObandoAún no hay calificaciones
- El Estudio de Los Vectores Es Importante en Cualquier Curso de FísicaDocumento20 páginasEl Estudio de Los Vectores Es Importante en Cualquier Curso de FísicaRoberto VegaAún no hay calificaciones
- Geometría Analítica y Vectores y Homologas PDFDocumento117 páginasGeometría Analítica y Vectores y Homologas PDFCharly OkAún no hay calificaciones
- Ecuaciones Constitutivas Mecanica de FluidosDocumento12 páginasEcuaciones Constitutivas Mecanica de Fluidosemd1966Aún no hay calificaciones
- Principio de Transmisibilidad de Una Fuerza FDocumento9 páginasPrincipio de Transmisibilidad de Una Fuerza FAdriana PCAún no hay calificaciones
- Practica 10 Transformacion y Conservacion de La Energia I Sem 2019Documento5 páginasPractica 10 Transformacion y Conservacion de La Energia I Sem 2019Duvan CondeAún no hay calificaciones
- Fisica Lab3Documento5 páginasFisica Lab3pecaitoAún no hay calificaciones
- Deformación en VigasDocumento9 páginasDeformación en VigaspaulaAún no hay calificaciones
- Propiedades Elásticas de Los MaterialesDocumento11 páginasPropiedades Elásticas de Los MaterialesCarlos Piña100% (1)
- Taller PenduloDocumento5 páginasTaller PenduloKAREN GONZALEZAún no hay calificaciones
- Tensor de Tensiones PDFDocumento34 páginasTensor de Tensiones PDFRuben Dario Ortiz FAún no hay calificaciones
- Momento de InerciaDocumento18 páginasMomento de InerciaEli HillAún no hay calificaciones
- TEORIA de Momento de InerciaDocumento6 páginasTEORIA de Momento de Inerciajpdavila205Aún no hay calificaciones
- Investigación Momento de Inercia. Mario LagosDocumento10 páginasInvestigación Momento de Inercia. Mario LagosWalter Meneses CordobaAún no hay calificaciones
- Momento de Inercia Mecanica RacionalDocumento7 páginasMomento de Inercia Mecanica RacionalPedro HerreraAún no hay calificaciones
- Momento de InerciaDocumento12 páginasMomento de InerciathalialuceroAún no hay calificaciones
- CollectionDocumento5 páginasCollectionabreujose123Aún no hay calificaciones
- Reporte 2 - Medios de CultivoDocumento12 páginasReporte 2 - Medios de CultivoEmilio GarciaAún no hay calificaciones
- Tipos de DirecciónDocumento10 páginasTipos de DirecciónEmilio GarciaAún no hay calificaciones
- Ensayo Transferencia de MasaDocumento2 páginasEnsayo Transferencia de MasaEmilio GarciaAún no hay calificaciones
- Reporte Torre EmpacadaDocumento42 páginasReporte Torre EmpacadaEmilio Garcia100% (2)
- Reporte 1 - Uso Del MicroscopioDocumento22 páginasReporte 1 - Uso Del MicroscopioEmilio GarciaAún no hay calificaciones
- Difusión en Estado No Estacionario: Modelo de Roberto TreybalDocumento3 páginasDifusión en Estado No Estacionario: Modelo de Roberto TreybalEmilio GarciaAún no hay calificaciones
- Misión, Visión y ObjetivosDocumento5 páginasMisión, Visión y ObjetivosEmilio GarciaAún no hay calificaciones
- Difusividad Del Zinc LíquidoDocumento3 páginasDifusividad Del Zinc LíquidoEmilio GarciaAún no hay calificaciones
- Análisis Del Tratado de Dublín Sobre El AguaDocumento2 páginasAnálisis Del Tratado de Dublín Sobre El AguaEmilio GarciaAún no hay calificaciones
- 2010 - Practica Resistividad y Ley de OhmDocumento11 páginas2010 - Practica Resistividad y Ley de OhmPaola AcostaAún no hay calificaciones
- Conociendo El Uso y Cuidado Del EquipoDocumento3 páginasConociendo El Uso y Cuidado Del EquipoEmilio GarciaAún no hay calificaciones
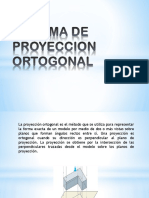
- Sistemas de Proyeccion OrtogonalDocumento11 páginasSistemas de Proyeccion OrtogonalAaron Calderon GuillermoAún no hay calificaciones
- Capítulo 2.2 - Operaciones Con VectoresDocumento16 páginasCapítulo 2.2 - Operaciones Con VectoresanaAún no hay calificaciones
- 2 TRIGONOMETRIA Curso de Nivelacion 2023Documento28 páginas2 TRIGONOMETRIA Curso de Nivelacion 2023florentinagustinlautaroAún no hay calificaciones
- El Axioma de CongruenciaDocumento5 páginasEl Axioma de CongruenciaBibianaGiraldoAún no hay calificaciones
- Calculo DiferencialDocumento28 páginasCalculo DiferencialAdrielAún no hay calificaciones
- Actividad N 5 Identificaci N y Caracterizaci N de Campos Vectoriales Revisi N Del Intento 3.5 PDFDocumento6 páginasActividad N 5 Identificaci N y Caracterizaci N de Campos Vectoriales Revisi N Del Intento 3.5 PDFJohan BAún no hay calificaciones
- EjerciciosDocumento12 páginasEjerciciosDANIEL ALBERTO LATORRE JARAMILLOAún no hay calificaciones
- 1.2. Ejercicios Resueltos - Gram Schmidt, Complemento Ortogonal, Proyeccion Ortogonal y DistanciaDocumento7 páginas1.2. Ejercicios Resueltos - Gram Schmidt, Complemento Ortogonal, Proyeccion Ortogonal y DistanciaEmanuel Cerrudo0% (1)
- Examen de Geometria de Cuartode Secundaria PDFDocumento4 páginasExamen de Geometria de Cuartode Secundaria PDFAnneurys Peña MarteAún no hay calificaciones
- Los Datos GeográficosDocumento10 páginasLos Datos GeográficosSteven CGAún no hay calificaciones
- Dibujo TecnicoDocumento104 páginasDibujo TecnicoChristian Ramiro Jácome SambacheAún no hay calificaciones
- Proyecto de ProblematizaciónDocumento12 páginasProyecto de ProblematizaciónTony Cedeño100% (1)
- Tema7 La Parabola.Documento8 páginasTema7 La Parabola.Garcia Romero DannaAún no hay calificaciones
- 6° Año - Introducción TrigonometríaDocumento4 páginas6° Año - Introducción TrigonometríaAntonella OteizaAún no hay calificaciones
- Taller Potenciacion RadicacionDocumento1 páginaTaller Potenciacion RadicacionGustavo Bocanegra CaroAún no hay calificaciones
- GEOMETRÍA 4°-Bal-I-Men - 19Documento6 páginasGEOMETRÍA 4°-Bal-I-Men - 19perkinsluisAún no hay calificaciones
- Complementos MatematicosDocumento11 páginasComplementos MatematicosMarjory Figueroa GutierrezAún no hay calificaciones
- Geometria (06) Dany RodasDocumento10 páginasGeometria (06) Dany RodasArmando JimenezAún no hay calificaciones
- Clase 6 FUNCIONES CONTINUAS Y DISCONTINUAS - 03Documento23 páginasClase 6 FUNCIONES CONTINUAS Y DISCONTINUAS - 03Nixon AyalaAún no hay calificaciones
- Iv PDFDocumento14 páginasIv PDFAndres GonzalezAún no hay calificaciones
- Trigonometria Graciela Burgos NamucheDocumento4 páginasTrigonometria Graciela Burgos NamucheJulio Sangay MantillaAún no hay calificaciones
- 11bcs-Mecanismos - Problemas - 2 - 2 Analisis de VelocidadesDocumento12 páginas11bcs-Mecanismos - Problemas - 2 - 2 Analisis de VelocidadesVerónicaMhAún no hay calificaciones
- SEMANA 4 - Raíces de Ecuaciones No Lineales 2Documento5 páginasSEMANA 4 - Raíces de Ecuaciones No Lineales 2Franz Leonard NayyarAún no hay calificaciones
- Modulo Ii PDFDocumento12 páginasModulo Ii PDFFidel HeraldezAún no hay calificaciones
- Evaluacion Trabajo Practico 4 tp4 171118Documento11 páginasEvaluacion Trabajo Practico 4 tp4 171118NicolasAún no hay calificaciones
- UNIDAD DIDACTICA No.21 CONODocumento8 páginasUNIDAD DIDACTICA No.21 CONOErick Sabana CanicheAún no hay calificaciones
- 01 Elementos Geométricos - Geometría Segundo de SecundariaDocumento11 páginas01 Elementos Geométricos - Geometría Segundo de SecundariaEdwinLuisZegarraRiosAún no hay calificaciones
- Taller Evaluable IiDocumento3 páginasTaller Evaluable IiAndrea Jimena Jojoa CoralAún no hay calificaciones
- 6u13irudi Lauen AzaleraDocumento9 páginas6u13irudi Lauen Azalerakuetoeskola1Aún no hay calificaciones