También podría gustarte
- Transformación de Esfuerzos PDFDocumento27 páginasTransformación de Esfuerzos PDFzayda ccencho alanyaAún no hay calificaciones
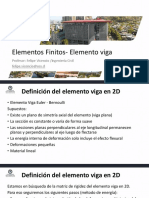
- FEM05 - Elemento Viga 2DDocumento43 páginasFEM05 - Elemento Viga 2DFelipe VicencioAún no hay calificaciones
- ElasticidadDocumento15 páginasElasticidadWalter Pacheco ChapoñanAún no hay calificaciones
- R L G H: Esistencia de Materiales EY Eneralizada de OokeDocumento4 páginasR L G H: Esistencia de Materiales EY Eneralizada de OokeMaragaño FranAún no hay calificaciones
- Torque y Centro de MasaDocumento29 páginasTorque y Centro de MasaLuis David Gordon RodriguezAún no hay calificaciones
- FÍSICA VECTORES RESULTANTES SUMA RESTADocumento15 páginasFÍSICA VECTORES RESULTANTES SUMA RESTARusbel ValdiviaAún no hay calificaciones
- Mecánica Vectorial - Dinámica PROBLEMAS SEMANA 3-1Documento4 páginasMecánica Vectorial - Dinámica PROBLEMAS SEMANA 3-1Daniel OrellanaAún no hay calificaciones
- C.1.semana 3-1 Movimiento BidimensionalDocumento29 páginasC.1.semana 3-1 Movimiento BidimensionalJOHAN LEE SANCHEZ HUAYANEYAún no hay calificaciones
- TP2 - Elasticidad y Resistencia de Los Materiales - Conceptos y Principios Básicos - ResoluciónDocumento10 páginasTP2 - Elasticidad y Resistencia de Los Materiales - Conceptos y Principios Básicos - ResoluciónBel VidaurreAún no hay calificaciones
- Parcial Física 1Documento7 páginasParcial Física 1LEIDY VANESSA ROMERO ORTIZAún no hay calificaciones
- ECA2 R3 SolDocumento2 páginasECA2 R3 Solivan.romero.blancoAún no hay calificaciones
- Practica I.GuerreroDocumento16 páginasPractica I.GuerreroDaniel GuerreroAún no hay calificaciones
- Cuatro Cuerpos Cargados Positivamente Ley de CoulombDocumento3 páginasCuatro Cuerpos Cargados Positivamente Ley de CoulombAndres WayAún no hay calificaciones
- Examen Tensorial FACING PDFDocumento6 páginasExamen Tensorial FACING PDFSantusa CondoriAún no hay calificaciones
- SESION 2 CGT SiDocumento28 páginasSESION 2 CGT SiMichael Patrick MaximilianoAún no hay calificaciones
- Tarea de Aplicaciones de La Edo de Orden SuperiorDocumento9 páginasTarea de Aplicaciones de La Edo de Orden SuperiorMariano MonjaAún no hay calificaciones
- S06.s1 - MaterialDocumento27 páginasS06.s1 - MaterialAlejandro MoAún no hay calificaciones
- EJERCICIORESUELTO14GUIA22021Documento2 páginasEJERCICIORESUELTO14GUIA22021ronaldo gavilanAún no hay calificaciones
- Ecuaciones ParamétricasDocumento5 páginasEcuaciones ParamétricasJOSFER ANTONIO VELASQUEZ GONZALEZAún no hay calificaciones
- Llontop VDocumento24 páginasLlontop VBenito Llontop SandovalAún no hay calificaciones
- AMIII - Pizarra 2 - 2022-1Documento10 páginasAMIII - Pizarra 2 - 2022-1Adriana Valdivia PalaciosAún no hay calificaciones
- Vectores 1Documento15 páginasVectores 1Demon BlackAún no hay calificaciones
- 11° Sistema de Coordenada Rectangular en El EspacioDocumento39 páginas11° Sistema de Coordenada Rectangular en El EspacioAngelo AlbujarAún no hay calificaciones
- Pack 1 4 5 Trab3Documento7 páginasPack 1 4 5 Trab3Marcos Antonio Cuba CamposAún no hay calificaciones
- E Unidad 2 Cinemática Del Cuerpo RígidoDocumento16 páginasE Unidad 2 Cinemática Del Cuerpo RígidoCristopher Amir Hernandez Alvarez100% (1)
- 5° Semana Física Intensivo San MarcosDocumento17 páginas5° Semana Física Intensivo San MarcosLeonardo Goicochea CamargoAún no hay calificaciones
- CuaternionesDocumento4 páginasCuaternionesNeheyler MecatrónicoAún no hay calificaciones
- S04.s2 - MaterialDocumento31 páginasS04.s2 - MaterialAlejandro MoAún no hay calificaciones
- CuaternionesDocumento4 páginasCuaternionesNeheyler MecatrónicoAún no hay calificaciones
- EVANSDocumento88 páginasEVANSOswaldin ZamAún no hay calificaciones
- Wil Lab 2Documento4 páginasWil Lab 2Quispe Chambi WildrenAún no hay calificaciones
- Energía Del MAS y AplicacionesDocumento15 páginasEnergía Del MAS y AplicacionesHELLEN YISELL CALDERON RODRIGUEZAún no hay calificaciones
- S07.s2 - Suma de VectoresDocumento17 páginasS07.s2 - Suma de VectoresAlejandro MoAún no hay calificaciones
- Lab. Física I #1Documento17 páginasLab. Física I #1Ingri MagneAún no hay calificaciones
- Pdf. Dinámica Ejercicios ResueltosDocumento17 páginasPdf. Dinámica Ejercicios Resueltosamena6cAún no hay calificaciones
- Sarabia Karen D04Documento5 páginasSarabia Karen D04Kelly BastidasAún no hay calificaciones
- Capitulo 5Documento67 páginasCapitulo 5Jahir MaguiñaAún no hay calificaciones
- Masas de Los CuerposDocumento17 páginasMasas de Los CuerposJoan HidalgoAún no hay calificaciones
- S06.s1 - Segunda Condición de EquilibrioDocumento18 páginasS06.s1 - Segunda Condición de EquilibrioJesus Paucar MaguiñaAún no hay calificaciones
- Vectores FaDocumento38 páginasVectores FaLuisAún no hay calificaciones
- Tarea 2 301301 226Documento14 páginasTarea 2 301301 226Yerson RinconAún no hay calificaciones
- Principios de la dinámica y cinemáticaDocumento37 páginasPrincipios de la dinámica y cinemáticaCamilo Lucas Salfatte ValleAún no hay calificaciones
- Semana 02Documento19 páginasSemana 02YESSENIA ANACELI FERNANDEZ REYESAún no hay calificaciones
- Clase 03 - EstaticaDocumento18 páginasClase 03 - EstaticaAngel Manuel OvandoAún no hay calificaciones
- Coordenadas CurvilíneasDocumento5 páginasCoordenadas CurvilíneasJosue HernandezAún no hay calificaciones
- Vectores ortogonales y producto vectorialDocumento19 páginasVectores ortogonales y producto vectorialCarolina Choque MamaniAún no hay calificaciones
- Sesion 12Documento18 páginasSesion 12RaquelAún no hay calificaciones
- S03.s3 - Material - SoluciónDocumento23 páginasS03.s3 - Material - Soluciónjhony gamboa123100% (1)
- 7° Dinamica de FuerzasDocumento3 páginas7° Dinamica de Fuerzasandrea barreraAún no hay calificaciones
- A.1.semana 1-2 Álgebra VectorialDocumento39 páginasA.1.semana 1-2 Álgebra VectorialJOHAN LEE SANCHEZ HUAYANEYAún no hay calificaciones
- Examen de Física I - Problemas de Movimiento de un CollarínDocumento1 páginaExamen de Física I - Problemas de Movimiento de un CollarínSamuel RodríguezAún no hay calificaciones
- Arco Semicircular Triarticulado Con Carga Uniformemente Distribuida-FirmeDocumento9 páginasArco Semicircular Triarticulado Con Carga Uniformemente Distribuida-FirmeRuffo BarredaAún no hay calificaciones
- El Caos de La Incertidumbre (El Espín Cuántico)Documento9 páginasEl Caos de La Incertidumbre (El Espín Cuántico)Johana MurciaAún no hay calificaciones
- Clase 13. Torca y Aceleración AngularDocumento14 páginasClase 13. Torca y Aceleración AngularGabriela Gonzalez SilvaAún no hay calificaciones
- S04 Sesion 2 Movimiento en 2D ProyectilesDocumento24 páginasS04 Sesion 2 Movimiento en 2D ProyectilesYhonatan AUAún no hay calificaciones
- Secciones Cónicas en Coordenadas PolaresDocumento4 páginasSecciones Cónicas en Coordenadas PolaresJOSFER ANTONIO VELASQUEZ GONZALEZAún no hay calificaciones
- RSM Fi Ts003Documento7 páginasRSM Fi Ts003DirectoYajo OPAún no hay calificaciones
- Análisis Weibull - Ejemplos Básicos para Análisis de Confiabilidad - P21Documento8 páginasAnálisis Weibull - Ejemplos Básicos para Análisis de Confiabilidad - P21Andrea ZagastizabalAún no hay calificaciones
- Inf VacacionesDocumento2 páginasInf VacacionesJc PoetaAún no hay calificaciones
- Accesorios SubaruDocumento28 páginasAccesorios SubaruAndrea ZagastizabalAún no hay calificaciones
- Cerro Verde Contratistas 2011 PDFDocumento87 páginasCerro Verde Contratistas 2011 PDFJose ValleAún no hay calificaciones
- Formato de Investigacion Blue Stake: Deteccion de Instalaciones EnterradasDocumento2 páginasFormato de Investigacion Blue Stake: Deteccion de Instalaciones EnterradasWaldir Menes Umayasi CondoriAún no hay calificaciones
- 186070Documento2 páginas186070Andrea ZagastizabalAún no hay calificaciones
- Código para Soldadura Estructural - Acero: Una Norma Nacional AmericanaDocumento42 páginasCódigo para Soldadura Estructural - Acero: Una Norma Nacional AmericanaJavier GuardaminoAún no hay calificaciones
- Inducción Específica Mina y SSTT V9 PDFDocumento52 páginasInducción Específica Mina y SSTT V9 PDFBoñón Quiliche JCAún no hay calificaciones
- Clase - A - Categoría - Iib - Nuevo PDFDocumento28 páginasClase - A - Categoría - Iib - Nuevo PDFbrandonAún no hay calificaciones
- Preparación para el examen CMRP: 8 áreas clave para desarrollar competencia en los 5 pilaresDocumento7 páginasPreparación para el examen CMRP: 8 áreas clave para desarrollar competencia en los 5 pilaresrenzoAún no hay calificaciones
- SOATDocumento2 páginasSOATEdwin Carlos Lluen SanchezAún no hay calificaciones
- Teoria de Modelos PDFDocumento8 páginasTeoria de Modelos PDFMartha Elena Costales RamosAún no hay calificaciones
- Lección Completa PDF Tercer Trim 2019 PDFDocumento96 páginasLección Completa PDF Tercer Trim 2019 PDFPlayart Arte Liker FanarteAún no hay calificaciones
- Sunat GyfDocumento1 páginaSunat GyfAndrea ZagastizabalAún no hay calificaciones
- Acta de Contitucion Empresa Comercializadora de HuevosDocumento6 páginasActa de Contitucion Empresa Comercializadora de HuevosAndrea ZagastizabalAún no hay calificaciones
- Misionero Adult Os 2018 T 1Documento32 páginasMisionero Adult Os 2018 T 1Fernandez Gomez JoelAún no hay calificaciones
- Plan Mantto Fiansa 2008Documento46 páginasPlan Mantto Fiansa 2008Andrea ZagastizabalAún no hay calificaciones
- Fluidos Reales ViscosidadDocumento6 páginasFluidos Reales ViscosidadJoardith DelgadoAún no hay calificaciones
- Heatexchanger Gasket Brochure - SpanishDocumento2 páginasHeatexchanger Gasket Brochure - SpanishAndrea ZagastizabalAún no hay calificaciones
- Sistema de Diagnosticos Cid Mid FmiDocumento45 páginasSistema de Diagnosticos Cid Mid FmiAndrea Zagastizabal100% (1)
- SPDocumento460 páginasSPanghelexAún no hay calificaciones
- Calendar I Ocu Rsos KF 2017Documento1 páginaCalendar I Ocu Rsos KF 2017Andrea ZagastizabalAún no hay calificaciones
- El hombre que calculaba: la historia del profesor que enseñó matemáticas a través de cuentosDocumento230 páginasEl hombre que calculaba: la historia del profesor que enseñó matemáticas a través de cuentosFelipePipePeláezAún no hay calificaciones
- Teorías del desarrollo humano: perspectivas multidimensionalesDocumento5 páginasTeorías del desarrollo humano: perspectivas multidimensionalesANGIE . ROJAS PEREZAún no hay calificaciones
- EXPOOOOOODocumento11 páginasEXPOOOOOOEyza RodriguezAún no hay calificaciones
- LOPE - NovelistaDocumento17 páginasLOPE - Novelistakerba25Aún no hay calificaciones
- Riesgos naturalesDocumento6 páginasRiesgos naturalesJoel Anthony Crisologo EspejoAún no hay calificaciones
- Copia de FICHA DE SEGURIDAD GRANALLA ECOLOGICADocumento3 páginasCopia de FICHA DE SEGURIDAD GRANALLA ECOLOGICAIgnacio OneilAún no hay calificaciones
- SVS y CBCADocumento7 páginasSVS y CBCAc o l d n e p t u n eAún no hay calificaciones
- Exposicion - Movilidad en La IndiaDocumento41 páginasExposicion - Movilidad en La IndiaPompeyo Alexander Campos SotoAún no hay calificaciones
- Grado 6 ArtísticaDocumento2 páginasGrado 6 ArtísticaUnidad Educación UGAún no hay calificaciones
- Historia Sobre El Árbol de NavidadDocumento3 páginasHistoria Sobre El Árbol de NavidadJulio César Fernández MenéndezAún no hay calificaciones
- Manual para La Presentación de Anteproyectos e Informes de Investigación ResumenDocumento22 páginasManual para La Presentación de Anteproyectos e Informes de Investigación ResumenGardo Ibarra0% (1)
- FODMAPDocumento2 páginasFODMAPLorena HernándezAún no hay calificaciones
- VII Convenio Colectivo Personal LaboralDocumento10 páginasVII Convenio Colectivo Personal Laboralmanuel7valverde7buenAún no hay calificaciones
- El Propósito Del YogaDocumento4 páginasEl Propósito Del YogaClara AlvaradoAún no hay calificaciones
- LITERATURADocumento4 páginasLITERATURAHelena Sophie Volz OportoAún no hay calificaciones
- Mineria de CalDocumento4 páginasMineria de CalJuan Felipe Cortes FernandezAún no hay calificaciones
- Tiro Vertical - Ejercicios Human Ida DesDocumento1 páginaTiro Vertical - Ejercicios Human Ida Desameperezmelo@yahoo.comAún no hay calificaciones
- U4 - Actividad 5Documento5 páginasU4 - Actividad 5JENNY CAROLINA ORTEGA VARGASAún no hay calificaciones
- Formato # 1 y # 2 Matrices FODADocumento2 páginasFormato # 1 y # 2 Matrices FODAAdrian Aaron Medrano VargasAún no hay calificaciones
- Notas para Una Simbología de La RosaDocumento30 páginasNotas para Una Simbología de La Rosaluchinov100% (1)
- Educacion Física 1ero y 2do MomentoDocumento4 páginasEducacion Física 1ero y 2do MomentoMax PaheinAún no hay calificaciones
- Transporte de gas licuado a baja presión en cisternaDocumento2 páginasTransporte de gas licuado a baja presión en cisternaVictor PerezAún no hay calificaciones
- Consultas Normalizadas de Meddra: Standardised Meddra Queries (SMQS)Documento67 páginasConsultas Normalizadas de Meddra: Standardised Meddra Queries (SMQS)Bernal GomezAún no hay calificaciones
- Proyecto Carro SolarDocumento33 páginasProyecto Carro SolaryvanAún no hay calificaciones
- Los Conceptos y La Codificacion MoodleDocumento18 páginasLos Conceptos y La Codificacion Moodlegalahad_tannhauser9981Aún no hay calificaciones
- DIA 1 SESION de APRENDIZAJE Elaboro Mi Propuesta de ActividadesDocumento6 páginasDIA 1 SESION de APRENDIZAJE Elaboro Mi Propuesta de Actividadesalexander alzamoraAún no hay calificaciones
- Cartilla Tecnica ExcavacionesDocumento2 páginasCartilla Tecnica ExcavacionesVane OliveraAún no hay calificaciones
- Extensión de ArchivosDocumento2 páginasExtensión de ArchivosLorena TanelliAún no hay calificaciones
- Ejercicio Packet Tracer 02Documento2 páginasEjercicio Packet Tracer 02CARLOS ANDRES PAEZAún no hay calificaciones
- Ejemplo - Perfil Del CargoDocumento5 páginasEjemplo - Perfil Del CargoTatiana Lievano GonzalezAún no hay calificaciones
- QueratometriaDocumento2 páginasQueratometriaEstrellita Hinostroza0% (1)