También podría gustarte
- Práctica 2 Modelos AmbientalesDocumento5 páginasPráctica 2 Modelos AmbientalesBrent GonzálezAún no hay calificaciones
- PsicrometriaDocumento15 páginasPsicrometriavgalloAún no hay calificaciones
- Aplicacion Riles Riego (Vinas) PDFDocumento66 páginasAplicacion Riles Riego (Vinas) PDFMarcos Rodrigo Venegas MuñozAún no hay calificaciones
- PLL 4046 Con CmosDocumento22 páginasPLL 4046 Con CmosJonathan Presentacion100% (2)
- Empresa Argos S.ADocumento23 páginasEmpresa Argos S.AEmilia Diaz DiazAún no hay calificaciones
- Clase de Repaso para El Primer Parcial Clase 6Documento5 páginasClase de Repaso para El Primer Parcial Clase 6lolaAún no hay calificaciones
- Facilidades JoaniDocumento13 páginasFacilidades JoaniAna RamirezAún no hay calificaciones
- Trabajo Practico TermodinamicaDocumento8 páginasTrabajo Practico TermodinamicaAndreita FedericoAún no hay calificaciones
- Las Placas de Orificio Es Uno de Los Dispositivos de Medición Más AntiguosDocumento5 páginasLas Placas de Orificio Es Uno de Los Dispositivos de Medición Más AntiguosCristhianMontañoAún no hay calificaciones
- Ejercicios para Practicar - Parametros FisicosDocumento1 páginaEjercicios para Practicar - Parametros Fisicoslorena fory100% (1)
- Difusividad en El Grano de ArrozDocumento4 páginasDifusividad en El Grano de ArrozAngel Ulises RiosAún no hay calificaciones
- ReologiaDocumento7 páginasReologiazoraidaAún no hay calificaciones
- El Secado Mecanico Del CafeDocumento8 páginasEl Secado Mecanico Del CafeAngel NajarroAún no hay calificaciones
- Secador de Lecho de FluidoDocumento4 páginasSecador de Lecho de FluidoJoel SosaAún no hay calificaciones
- Conductividad Térmica - Docx Practica2 CASLIFICADO GARRIDODocumento15 páginasConductividad Térmica - Docx Practica2 CASLIFICADO GARRIDOAntonio SilvaAún no hay calificaciones
- Destilacion ContinuaDocumento16 páginasDestilacion ContinuaTahic PAún no hay calificaciones
- Balance de Masa y Energia en El Reactor Tipo RiserDocumento3 páginasBalance de Masa y Energia en El Reactor Tipo RiserJavier MendozaAún no hay calificaciones
- Corripio 9 - 27Documento52 páginasCorripio 9 - 27Jassir BarahonaAún no hay calificaciones
- Informe Analisis DimensionalDocumento8 páginasInforme Analisis DimensionalDaniel Cadavid100% (1)
- Colección de Problemas Resueltos de Tecnología Frigorífica Versión 3.0, Diciembre de 2006Documento47 páginasColección de Problemas Resueltos de Tecnología Frigorífica Versión 3.0, Diciembre de 2006ffffffffffAún no hay calificaciones
- Guia de Primera Ley de La TermodinaicaDocumento4 páginasGuia de Primera Ley de La TermodinaicaDANIEL ORTIZAún no hay calificaciones
- Ejemplo3 3Documento6 páginasEjemplo3 3Manuel Eduardo Escobar OsorioAún no hay calificaciones
- Validacion de Termopares (Protocolo)Documento71 páginasValidacion de Termopares (Protocolo)Jorge antonioAún no hay calificaciones
- Informe de Caldera e Intercambiador de Calor - ModificadoDocumento28 páginasInforme de Caldera e Intercambiador de Calor - ModificadoYunni AlixonAún no hay calificaciones
- Semana 3-s A AAAAAAAAAAAA Diseño Conceptual de ProcesosDocumento28 páginasSemana 3-s A AAAAAAAAAAAA Diseño Conceptual de ProcesosBrisa J. Rojas GutierrezAún no hay calificaciones
- Práctica 1 Hoja GuíaDocumento15 páginasPráctica 1 Hoja GuíaErick ÁvalosAún no hay calificaciones
- Informe Balance de Materia 2 ParteDocumento19 páginasInforme Balance de Materia 2 Parteyessenia fiorella salazar torresAún no hay calificaciones
- Modelacion Atmosferica de La Calidad Del AireDocumento34 páginasModelacion Atmosferica de La Calidad Del AireReyder JaeeAún no hay calificaciones
- Boquilla FlujoDocumento7 páginasBoquilla FlujoSantiago RomeroAún no hay calificaciones
- Cuadro SecadoresDocumento3 páginasCuadro SecadoresKlaudia VieraAún no hay calificaciones
- Practica 7 - Convección ForzadaDocumento3 páginasPractica 7 - Convección Forzadasebastian sierraAún no hay calificaciones
- eJERCICIO FENOMENOS 2Documento2 páginaseJERCICIO FENOMENOS 2Kathlyn GarcíaAún no hay calificaciones
- Difusion de Gases EQUIPO 1Documento9 páginasDifusion de Gases EQUIPO 1Dolores MontenegroAún no hay calificaciones
- Bitacora # 1Documento3 páginasBitacora # 1Laura Maria Carranza CabraAún no hay calificaciones
- PMC User Es PDFDocumento51 páginasPMC User Es PDFspotlight_brianAún no hay calificaciones
- Algoritmo de Cálculo de HumidificaciónDocumento2 páginasAlgoritmo de Cálculo de HumidificaciónAbner J Valdivia100% (1)
- Mantenimiento en Turbinas de VaporDocumento11 páginasMantenimiento en Turbinas de VaporMaju TorresAún no hay calificaciones
- Muestreo de SueloDocumento6 páginasMuestreo de SueloEntsaje Castro EdgarAún no hay calificaciones
- Manual Del Viscosimetro Brook FieldDocumento7 páginasManual Del Viscosimetro Brook FieldAlfredo Abelardo Carmona Ruiz100% (1)
- Informe de FluiodosDocumento23 páginasInforme de FluiodosSergio E. Mallqui GamarraAún no hay calificaciones
- Lab. Arquimedes y BourdonDocumento40 páginasLab. Arquimedes y BourdonChristian CuervoAún no hay calificaciones
- 2019 Ejercicios - AerobiosDocumento12 páginas2019 Ejercicios - AerobiosAndrea AvilaAún no hay calificaciones
- Practica 2Documento4 páginasPractica 2Manuel BeltreAún no hay calificaciones
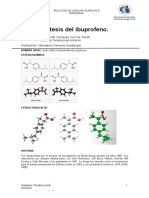
- Síntesis Del IbuprofenoDocumento7 páginasSíntesis Del IbuprofenoGaleana AntonioAún no hay calificaciones
- Practica: Densidad y ViscosidadDocumento2 páginasPractica: Densidad y ViscosidadjoseAún no hay calificaciones
- Proyecto de Aula GeologíaDocumento31 páginasProyecto de Aula GeologíaManuelaZeaAún no hay calificaciones
- Problema 8Documento5 páginasProblema 8EdwinAvalosAún no hay calificaciones
- Informe 2 Flujo Compresible KDocumento19 páginasInforme 2 Flujo Compresible KKaren Piñeros Gonzalez0% (1)
- Presentacion Del Curso TdeC 2019-2 PDFDocumento25 páginasPresentacion Del Curso TdeC 2019-2 PDFsebastian galvisAún no hay calificaciones
- Informe Laboratorio QuimicaDocumento6 páginasInforme Laboratorio QuimicaËðwärdLëmüsAún no hay calificaciones
- Resolucao Mecanica Vetorial para Engenheiros 9ed Cap 6 10 EstaticaDocumento4 páginasResolucao Mecanica Vetorial para Engenheiros 9ed Cap 6 10 EstaticaCarolina RivasAún no hay calificaciones
- Ejemplo AAADocumento7 páginasEjemplo AAAhalina pradaAún no hay calificaciones
- CalorímetroDocumento11 páginasCalorímetroEMERITA OJEDA CHOCLOTEAún no hay calificaciones
- AnemómetroDocumento5 páginasAnemómetroAle Kukutschka LöpezAún no hay calificaciones
- La Impresión 3D en La Ingeniería AmbientalDocumento3 páginasLa Impresión 3D en La Ingeniería AmbientalJhordan OrellanaAún no hay calificaciones
- Cap - I-Ii-Iii-IvDocumento330 páginasCap - I-Ii-Iii-IvLuisAlbertoChumioqueDelgadoAún no hay calificaciones
- Flujo de Fluidos y La Ecuación de BernoulliDocumento4 páginasFlujo de Fluidos y La Ecuación de BernoulliOLIVER OJEDA100% (1)
- Dinámica de Tanques de DrenajeDocumento4 páginasDinámica de Tanques de Drenajeingeneria biotecnologicaAún no hay calificaciones
- Dinámica de Tanques de Drenaje - 2009Documento4 páginasDinámica de Tanques de Drenaje - 2009Marizeth Rosario CAAún no hay calificaciones
- Dinámica de Tanques de DrenajeDocumento5 páginasDinámica de Tanques de DrenajeGustavo VilcapazaAún no hay calificaciones
- CstationDocumento3 páginasCstationAlvaro SecAún no hay calificaciones
- Centrifugacion PDFDocumento32 páginasCentrifugacion PDFCristina SilvaAún no hay calificaciones
- Problrmas 7Documento8 páginasProblrmas 7Cristina SilvaAún no hay calificaciones
- Introducción Al Software CONTROL STATIONDocumento7 páginasIntroducción Al Software CONTROL STATIONCristina SilvaAún no hay calificaciones
- Análisis de Residuos Solidos UrbanosDocumento7 páginasAnálisis de Residuos Solidos UrbanosCristina SilvaAún no hay calificaciones
- Practica N - 9 Prueba de Anillo en Leche y Seroaglutinacion en PlacaDocumento4 páginasPractica N - 9 Prueba de Anillo en Leche y Seroaglutinacion en PlacaCristina SilvaAún no hay calificaciones
- Practica N - 9 Prueba de Anillo en Leche y Seroaglutinacion en PlacaDocumento4 páginasPractica N - 9 Prueba de Anillo en Leche y Seroaglutinacion en PlacaCristina SilvaAún no hay calificaciones
- Elaboracion de Yogurt BioDocumento18 páginasElaboracion de Yogurt BioSabrina Gutierrez GarciaAún no hay calificaciones
- Reporte Práctica Presión HidrostáticaDocumento6 páginasReporte Práctica Presión Hidrostáticamagdalena100% (1)
- Mecanismos de CalorDocumento14 páginasMecanismos de CalorJesús David Barrios GonzalezAún no hay calificaciones
- Informe de Verificación Inicial Casa HabitaciónDocumento25 páginasInforme de Verificación Inicial Casa HabitaciónCristian GomezAún no hay calificaciones
- Respuesta Emocional Condicionada (Resumen)Documento4 páginasRespuesta Emocional Condicionada (Resumen)GTasero67% (3)
- Exposicion de MatematicaDocumento11 páginasExposicion de Matematicaevelyn patricia tejada llacasAún no hay calificaciones
- Modulo Trato Al Usuario MetroDocumento20 páginasModulo Trato Al Usuario Metrodaniiel yiidAún no hay calificaciones
- Comprensión MusicalDocumento177 páginasComprensión MusicalISAAC0% (1)
- Jaula de Faraday.Documento11 páginasJaula de Faraday.Ronald Marcelo BlasAún no hay calificaciones
- La Capilaridad en Los LiquidosDocumento13 páginasLa Capilaridad en Los LiquidosCarlosBladimirEspinolaRosarioAún no hay calificaciones
- SemiconductoresDocumento6 páginasSemiconductoresSgor KronosAún no hay calificaciones
- Ejercicios de PseudocodigosDocumento45 páginasEjercicios de PseudocodigosOmar Vilca Lobaton100% (1)
- Informe de BrujulaDocumento18 páginasInforme de BrujulaDavid Pacuri Deza100% (1)
- Test t.6 - Dispensación de Productos ParafarmacéuticosDocumento3 páginasTest t.6 - Dispensación de Productos ParafarmacéuticosjdAún no hay calificaciones
- Evaluación Procedimientos Rev. 3 (Agosto 2020)Documento42 páginasEvaluación Procedimientos Rev. 3 (Agosto 2020)Wladimir ApablazaAún no hay calificaciones
- Plegadora Hidraulica Mp3003 CNC 997 1407268418Documento70 páginasPlegadora Hidraulica Mp3003 CNC 997 1407268418Abelardo PeironeAún no hay calificaciones
- Pasaje de UnidadDocumento6 páginasPasaje de UnidadNicolás OviedoAún no hay calificaciones
- Destilación Al VacíoDocumento6 páginasDestilación Al VacíoAlex GuzmanAún no hay calificaciones
- Tds Corrotec Anticorrosivo Al AguaDocumento4 páginasTds Corrotec Anticorrosivo Al AguaGesler LaraAún no hay calificaciones
- Catalogo DeWalt 2017 LOW - RESDocumento96 páginasCatalogo DeWalt 2017 LOW - REShernanfloresrAún no hay calificaciones
- Notación Exponencial y Notación CientíficaDocumento7 páginasNotación Exponencial y Notación CientíficaGiuliana ChuranoAún no hay calificaciones
- Examen de Geologia JGFDocumento9 páginasExamen de Geologia JGFanon_219452154Aún no hay calificaciones
- Completo El Laberinto Del SignificadoDocumento17 páginasCompleto El Laberinto Del SignificadoShango AguirreAún no hay calificaciones
- Hidrologia Alcantarillado Pluvial Quio1Documento29 páginasHidrologia Alcantarillado Pluvial Quio1Heysons Gomez EscandonAún no hay calificaciones
- Sesma Manzano FernandoDocumento6 páginasSesma Manzano FernandoJose Antonio Jaramillo GameroAún no hay calificaciones
- Cuadro Nomenclatura Química Inorgánica - ICI-ICCI - 1º Sem 2015Documento8 páginasCuadro Nomenclatura Química Inorgánica - ICI-ICCI - 1º Sem 2015Camila Alejandra Órdenes ArayaAún no hay calificaciones
- Manual Reparación ECUsDocumento109 páginasManual Reparación ECUsjemaliz92% (36)
- DGFHJKDocumento9 páginasDGFHJKLuis Gustavo Choque BordaAún no hay calificaciones
- Universidad Nacional Del AltiplanoDocumento43 páginasUniversidad Nacional Del Altiplanodersun04Aún no hay calificaciones