También podría gustarte
- Fan ClutchDocumento2 páginasFan Clutchgaco88100% (1)
- Pinouts Ecu NissanDocumento3 páginasPinouts Ecu Nissansupermango00767% (3)
- Reprogramar Un Módulo Electrónico PCMDocumento11 páginasReprogramar Un Módulo Electrónico PCMsupermango007100% (2)
- Condensadores EvaporativosDocumento30 páginasCondensadores EvaporativosOctavinho Corona SalinasAún no hay calificaciones
- Presión Del Embrague Del Control Hidráulico de La Transmisión - PruebaDocumento8 páginasPresión Del Embrague Del Control Hidráulico de La Transmisión - PruebaQuirozRojasCesarAún no hay calificaciones
- Hidraulica en Perforacion para DisertarDocumento64 páginasHidraulica en Perforacion para DisertarVictor Nieves100% (1)
- Tractor D9R en Español CatDocumento24 páginasTractor D9R en Español CatCesar Santibañez100% (1)
- MEMORIA DE CALCULO-bca - ALBAÑILERIA CONFINADA PDFDocumento56 páginasMEMORIA DE CALCULO-bca - ALBAÑILERIA CONFINADA PDFJenner Amado Loyola santillanAún no hay calificaciones
- Esta EtapaDocumento28 páginasEsta Etapasupermango007Aún no hay calificaciones
- ACTORES ProcesoDocumento1 páginaACTORES Procesosupermango007Aún no hay calificaciones
- Bloquear Páginas y Facebook en Windows 8Documento19 páginasBloquear Páginas y Facebook en Windows 8supermango007Aún no hay calificaciones
- Mis Brazos Son UstedesDocumento1 páginaMis Brazos Son Ustedessupermango007Aún no hay calificaciones
- RrosarioDocumento8 páginasRrosariosupermango007Aún no hay calificaciones
- Activar Windows XP CaducadoDocumento1 páginaActivar Windows XP Caducadosupermango007Aún no hay calificaciones
- Para Levantar La CabezaDocumento1 páginaPara Levantar La Cabezasupermango007Aún no hay calificaciones
- Configurar Impresora y CajónDocumento10 páginasConfigurar Impresora y Cajónsupermango007Aún no hay calificaciones
- Esta Copia de Windows No Es Original SolucionDocumento3 páginasEsta Copia de Windows No Es Original Solucionsupermango007Aún no hay calificaciones
- Diseño y Desarrollo de Banco de Ensayos para Piezas Impresas en 3D - TFM-I-1516Documento96 páginasDiseño y Desarrollo de Banco de Ensayos para Piezas Impresas en 3D - TFM-I-1516YoAún no hay calificaciones
- Guía de Ejercicios #2: Ensayos Mecánicos Ejercicio 1: Ensayo de Tracción: Una Probeta Cilíndrica de Acero SAE 1020 de 20 MM de Diámetro y 100Documento16 páginasGuía de Ejercicios #2: Ensayos Mecánicos Ejercicio 1: Ensayo de Tracción: Una Probeta Cilíndrica de Acero SAE 1020 de 20 MM de Diámetro y 100TinAún no hay calificaciones
- Airbag AnalisisDocumento114 páginasAirbag AnalisishugodiAún no hay calificaciones
- AD190S36 16v K: Rigido 4X2Documento2 páginasAD190S36 16v K: Rigido 4X2Mariano Cal GarciaAún no hay calificaciones
- Laboratorio #6..Documento11 páginasLaboratorio #6..Alejandro UyenoAún no hay calificaciones
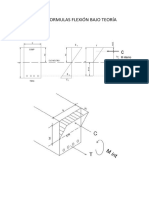
- Deducción Formulas Flexion Teoría ElásticaDocumento6 páginasDeducción Formulas Flexion Teoría ElásticaAlejandro San MartinAún no hay calificaciones
- Historia y Evolucion de Los Motores de Combustion InternaDocumento7 páginasHistoria y Evolucion de Los Motores de Combustion InternaMarisAún no hay calificaciones
- Tubosistemas Construcción CompletaDocumento63 páginasTubosistemas Construcción CompletaLuis13956353Aún no hay calificaciones
- Laboratorio 3 Neumática, Mandos Neumaticos en Funcion de Una VariablesDocumento4 páginasLaboratorio 3 Neumática, Mandos Neumaticos en Funcion de Una VariablesDaniel EstradaAún no hay calificaciones
- Teorema de KennedyDocumento7 páginasTeorema de KennedyLeslie OchoaAún no hay calificaciones
- Fisica IIDocumento50 páginasFisica IIJorge CastilloAún no hay calificaciones
- Balance de Energia FluidodinamicaDocumento37 páginasBalance de Energia Fluidodinamicairving_mendoza_58Aún no hay calificaciones
- Pack Examenes Finales 2016-2022Documento65 páginasPack Examenes Finales 2016-2022Oriol ArtolaAún no hay calificaciones
- Ayudantía 1 MDF 2020-1Documento1 páginaAyudantía 1 MDF 2020-1tito pazAún no hay calificaciones
- Actividad 3 - Interacción Con Los Gases IdealesDocumento16 páginasActividad 3 - Interacción Con Los Gases IdealesCRISTIAN ORDOEZAún no hay calificaciones
- 25) Sistema de DireccionDocumento30 páginas25) Sistema de DireccionCristhian DanielAún no hay calificaciones
- Anexo 3 "Programación de Obra Del Contrato de Obra No 002 de 2021"Documento6 páginasAnexo 3 "Programación de Obra Del Contrato de Obra No 002 de 2021"Carlos Alberto García SotoAún no hay calificaciones
- Hidraulica-de-Canales Flujo Uniforme y Critico PDFDocumento49 páginasHidraulica-de-Canales Flujo Uniforme y Critico PDFdaniel paredesAún no hay calificaciones
- Alfa Romeo 156 1.6 1998 - 01 Gestion Del MotorDocumento3 páginasAlfa Romeo 156 1.6 1998 - 01 Gestion Del Motorfelipe cordovaAún no hay calificaciones
- P2 - Reflujo TotalDocumento33 páginasP2 - Reflujo TotalJesus MendezAún no hay calificaciones
- Principio de Funcionamiento de Un Motor ElectricoDocumento7 páginasPrincipio de Funcionamiento de Un Motor ElectricoJonathan MedinaAún no hay calificaciones
- Hidráulica de Canales - ResumenDocumento108 páginasHidráulica de Canales - ResumenGilber Peña BacaAún no hay calificaciones
- Instrucciones CUBEDocumento4 páginasInstrucciones CUBEeljonny01Aún no hay calificaciones
- NOR 1001 Manual Spanish 524Documento12 páginasNOR 1001 Manual Spanish 524borisccAún no hay calificaciones