También podría gustarte
- Formulario FisicaDocumento4 páginasFormulario Fisicaa374284Aún no hay calificaciones
- Fisica1 PDFDocumento2 páginasFisica1 PDFLupita MorenoAún no hay calificaciones
- Simbolos A Utilizar Resistencia de Materiales para TrabajosDocumento36 páginasSimbolos A Utilizar Resistencia de Materiales para TrabajosDiomar MartinezAún no hay calificaciones
- Problemas BalotarioDocumento5 páginasProblemas BalotarioCarlos David Huamanchaqui QuispeAún no hay calificaciones
- Form in Completas Hasta Temperatura Fi 1-11Documento2 páginasForm in Completas Hasta Temperatura Fi 1-11By SupermiluthAún no hay calificaciones
- IMPT-130 Formulario Vibraciones 2021-2Documento3 páginasIMPT-130 Formulario Vibraciones 2021-2JazmínAmorósAlvaradoAún no hay calificaciones
- Formulario Final MET-1100Documento5 páginasFormulario Final MET-1100Adrian Vargas PumaAún no hay calificaciones
- Leyes Newton IIDocumento27 páginasLeyes Newton IIJuanito AlimanaAún no hay calificaciones
- Módulo #9Documento26 páginasMódulo #9kevin pabonAún no hay calificaciones
- Formulario de Física ClásicaDocumento5 páginasFormulario de Física Clásicachristopher chavezAún no hay calificaciones
- Problemas BalotarioDocumento3 páginasProblemas Balotariojorge pumahuacreAún no hay calificaciones
- Formulario Introducción A Los Procesos de SeparaciónDocumento4 páginasFormulario Introducción A Los Procesos de SeparaciónXanath PotAún no hay calificaciones
- Formulario Física IIDocumento5 páginasFormulario Física IImvenialgoAún no hay calificaciones
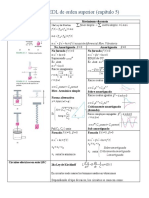
- Aplicaciones de Las EDL de Orden SuperiorDocumento3 páginasAplicaciones de Las EDL de Orden SuperiorLuis MiguelAún no hay calificaciones
- Práctica, Ejercicio 2, Fuerza y Aceleración, Tangencial y NormalDocumento4 páginasPráctica, Ejercicio 2, Fuerza y Aceleración, Tangencial y NormalAnais Briggit Jacinto ChavezAún no hay calificaciones
- Frenado de Vehiculo Ecu DifDocumento3 páginasFrenado de Vehiculo Ecu DifMAURO ANDRES BERTEL MERCADOAún no hay calificaciones
- Derivadas PDFDocumento5 páginasDerivadas PDFJUANKARLOS70Aún no hay calificaciones
- Formulario Física IIDocumento6 páginasFormulario Física IIArianaFloresSalazarAún no hay calificaciones
- Cuestionario FísicaDocumento8 páginasCuestionario FísicaAngelgo 3Aún no hay calificaciones
- (PDF) Ejercicios Resueltos de DinamicaDocumento37 páginas(PDF) Ejercicios Resueltos de DinamicaSophia Gómez SánchezAún no hay calificaciones
- UNIDAD 5 Esfuerzos en Vigas-II ParteDocumento51 páginasUNIDAD 5 Esfuerzos en Vigas-II PartePiero Axel Chalco EstradaAún no hay calificaciones
- Apuntes de DiseñoDocumento104 páginasApuntes de DiseñoJoanne WoodAún no hay calificaciones
- Formulas MecanicaDocumento1 páginaFormulas MecanicaANA MARIA GARCIA SALAZARAún no hay calificaciones
- Cuadernillo Matemáticas-13-15Documento3 páginasCuadernillo Matemáticas-13-15Forkan XAún no hay calificaciones
- Clase#7 Pavimentos 23Documento27 páginasClase#7 Pavimentos 23PeñateAún no hay calificaciones
- Formula RioDocumento6 páginasFormula RiopoioAún no hay calificaciones
- Ejercicios de Viscosidad 150826032012 Lva1 App6892Documento7 páginasEjercicios de Viscosidad 150826032012 Lva1 App6892lRuth Ramos HuancaAún no hay calificaciones
- Formuilario DinamicaDocumento3 páginasFormuilario DinamicaCesar Augusto Allende ChavezAún no hay calificaciones
- Problemas RepasoDocumento3 páginasProblemas RepasoIvana SuarezAún no hay calificaciones
- Parcial 3Documento6 páginasParcial 3Hugo PinedaAún no hay calificaciones
- Resumen Conversión de EnergíaDocumento11 páginasResumen Conversión de EnergíaEdward Nicolas Duarte ValenciaAún no hay calificaciones
- Qdoc - Tips - 5 Calculo de Engranajes Din 3990 1Documento17 páginasQdoc - Tips - 5 Calculo de Engranajes Din 3990 1JuanAún no hay calificaciones
- Apuntes Noviembre 2023Documento23 páginasApuntes Noviembre 2023Brayan BecerrilAún no hay calificaciones
- Movimiento Armonico SimpleDocumento4 páginasMovimiento Armonico SimpleAna Cristina Ayllón VelardeAún no hay calificaciones
- Trabajo y Energía - TeoríaDocumento5 páginasTrabajo y Energía - TeoríaFelix LeonAún no hay calificaciones
- Dinamica PDFDocumento24 páginasDinamica PDFCueva Jara Jhon Alexander100% (1)
- Formulario de EstáticaDocumento2 páginasFormulario de Estáticave425264Aún no hay calificaciones
- 5 1 Dinámica de PartículaDocumento15 páginas5 1 Dinámica de Partículaandrea cáceresAún no hay calificaciones
- Beam FlectionDocumento10 páginasBeam FlectionJosué Noha ValdiviaAún no hay calificaciones
- Resumen M.H.S. y OnesDocumento1 páginaResumen M.H.S. y OnesMario GómezAún no hay calificaciones
- RESUMEN de ESTIRADO Y TREFILADO-CI-2022Documento18 páginasRESUMEN de ESTIRADO Y TREFILADO-CI-2022Jose HorneroAún no hay calificaciones
- Formulario Variable ComplejaDocumento3 páginasFormulario Variable ComplejaHubert NabihAún no hay calificaciones
- EM1 - 381 - 2011 Ejemplo CargasDocumento5 páginasEM1 - 381 - 2011 Ejemplo CargasDIEGO ALLENDES ROJASAún no hay calificaciones
- Movimiento OscilatorioDocumento28 páginasMovimiento OscilatorioHELEN STACY AQUICE MIRANDA100% (1)
- RESUMEN DE FÓRMULAS MyMDocumento1 páginaRESUMEN DE FÓRMULAS MyMFelipe DuarteAún no hay calificaciones
- Formulario-De-Fisica-1 RESUMIDODocumento1 páginaFormulario-De-Fisica-1 RESUMIDOkjimin574Aún no hay calificaciones
- Modificado 4to Reporte de Practica de Laboratorio - Química GeneralDocumento7 páginasModificado 4to Reporte de Practica de Laboratorio - Química GeneralFrancisco Gabriel Cruz MexAún no hay calificaciones
- 8547Documento2 páginas8547David BPAún no hay calificaciones
- Ayudamemoriatercerparcial 1c22jjjDocumento2 páginasAyudamemoriatercerparcial 1c22jjjLara FeitoAún no hay calificaciones
- Hoja de FormulasDocumento3 páginasHoja de FormulasCandelaAún no hay calificaciones
- Formulario Resistencia de Los Materiales-Parcial2Documento3 páginasFormulario Resistencia de Los Materiales-Parcial2Basilio HuancaAún no hay calificaciones
- Mapa Parcial 2Documento1 páginaMapa Parcial 2Isa DautAún no hay calificaciones
- Fuerza de RozamientoDocumento4 páginasFuerza de RozamientoMichel Hans Paredes AraujoAún no hay calificaciones
- Examen de FluidosDocumento7 páginasExamen de FluidosAngie Liseth CordobaAún no hay calificaciones
- 11C.EDO Vibraciones Mecánicas AmortiguadasDocumento11 páginas11C.EDO Vibraciones Mecánicas Amortiguadasyanara mozóAún no hay calificaciones
- Problema 19Documento3 páginasProblema 19Jarly Brayan HerreraAún no hay calificaciones
- FORMULASDocumento1 páginaFORMULASAldhair Limachi HuarachiAún no hay calificaciones
- 8 Frenos y Acoplamientos de FricciónDocumento12 páginas8 Frenos y Acoplamientos de FricciónArturoAún no hay calificaciones
- La Fuerza PDFDocumento7 páginasLa Fuerza PDFJuan GuarellaAún no hay calificaciones
- 1 FichaDocumento2 páginas1 FichaNAUMBER1100% (2)
- La Fuerza PDFDocumento7 páginasLa Fuerza PDFJuan GuarellaAún no hay calificaciones
- ColorDocumento1 páginaColorJuan GuarellaAún no hay calificaciones
- Cronograma de ActividadesDocumento2 páginasCronograma de ActividadesJuan GuarellaAún no hay calificaciones
- LoscanariosblancosDocumento2 páginasLoscanariosblancosJuan GuarellaAún no hay calificaciones
- 2011 To Concurso Internacional Mieles Multi Flora LesDocumento3 páginas2011 To Concurso Internacional Mieles Multi Flora LesJuan GuarellaAún no hay calificaciones
- Cap 1 Del Capitalismo A La Sociedad Basada en El ConocimieDocumento26 páginasCap 1 Del Capitalismo A La Sociedad Basada en El ConocimieJuan GuarellaAún no hay calificaciones
- Em DinamicaDocumento36 páginasEm DinamicaEmmanuel Olguin CallejasAún no hay calificaciones
- AutosDocumento209 páginasAutosGaby EspíndolaAún no hay calificaciones
- Cambio Automatico Audi PDFDocumento26 páginasCambio Automatico Audi PDFMiguel ruiz100% (1)
- Neumatico Conti RV20Documento11 páginasNeumatico Conti RV20Julio George Obregon SantanaAún no hay calificaciones
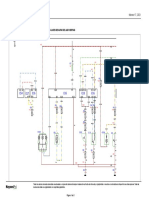
- Diagrama Cummins ISMDocumento1 páginaDiagrama Cummins ISMCristian RL100% (1)
- Actividad 5Documento18 páginasActividad 5Wilmer Davian Moreno HernandezAún no hay calificaciones
- 17 - Colector Admisión - Desmontar y MontarDocumento4 páginas17 - Colector Admisión - Desmontar y MontarInerAún no hay calificaciones
- Solenoides NeumaticosDocumento3 páginasSolenoides NeumaticosNelsonAún no hay calificaciones
- Informe (Sistema de Suspensión)Documento8 páginasInforme (Sistema de Suspensión)Gabriel Llerena Quenaya100% (2)
- Revision Tec MBazulDocumento1 páginaRevision Tec MBazulJavier MeryAún no hay calificaciones
- SKODADocumento5 páginasSKODAJosé Luis Mullo CasillasAún no hay calificaciones
- Mazda CX5 2018 33242Documento1 páginaMazda CX5 2018 33242Jibran MorenoAún no hay calificaciones
- FT Nuevo KicksDocumento2 páginasFT Nuevo KicksLuis MirandaAún no hay calificaciones
- Cuadro Comparativo de BateriasDocumento1 páginaCuadro Comparativo de BateriasRobertoAún no hay calificaciones
- Grupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDocumento6 páginasGrupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasJairo TivantaAún no hay calificaciones
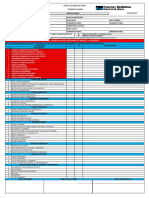
- Checklist RetroexcavadoraDocumento2 páginasChecklist RetroexcavadoraLuis Santelices VarasAún no hay calificaciones
- FZS-2 01568172365Documento2 páginasFZS-2 01568172365Mario VillaltaAún no hay calificaciones
- Check List Camion TolvaDocumento1 páginaCheck List Camion TolvaAlinsson AlvarezAún no hay calificaciones
- Mantenimiento y Control de Neumaticos en Buses de Transporte Interprovincial de PasajerosDocumento32 páginasMantenimiento y Control de Neumaticos en Buses de Transporte Interprovincial de PasajerosCarlos Alberto Pari UmiñaAún no hay calificaciones
- Ejercicios Tema 7Documento3 páginasEjercicios Tema 7Óscar Milian CabelloAún no hay calificaciones
- Caso de Estudio B Yellow BeltDocumento7 páginasCaso de Estudio B Yellow BeltIvan Aleman100% (1)
- VolkswagenDocumento4 páginasVolkswagenNicole Herbas MoralesAún no hay calificaciones
- Ficha T800 TractoDocumento2 páginasFicha T800 TractohaikAún no hay calificaciones
- Wega Ki JulioDocumento4 páginasWega Ki JulioFederico Gabino GonzalezAún no hay calificaciones
- .Archivetemp02 - Dlaa - Neblineros Originales y UniversalesDocumento16 páginas.Archivetemp02 - Dlaa - Neblineros Originales y UniversalesJuniors CruzAún no hay calificaciones
- DF 4438 TolvaDocumento2 páginasDF 4438 TolvaRodolfo Alberto100% (1)
- Ssangyong Musso Grand FTDocumento4 páginasSsangyong Musso Grand FTOscar Leonidas Lazo CáceresAún no hay calificaciones
- Miércoles, 25 de Agosto de 2021 Servifaco S.A de C.V Seguros Futuro P-916684 Municipio de San Salvador Hyundai ElantraDocumento2 páginasMiércoles, 25 de Agosto de 2021 Servifaco S.A de C.V Seguros Futuro P-916684 Municipio de San Salvador Hyundai ElantraWilliam JuarezAún no hay calificaciones
- Acta de Situacion VehicularDocumento8 páginasActa de Situacion VehicularYony CotradoAún no hay calificaciones
- Hyundai Informacion TecnicaDocumento17 páginasHyundai Informacion Tecnicaesteban fernandezAún no hay calificaciones
- Número de Identificación Vehicular VinDocumento28 páginasNúmero de Identificación Vehicular VinSil FloresAún no hay calificaciones