También podría gustarte
- Historia de La Etica ProfesionalDocumento3 páginasHistoria de La Etica ProfesionalAlexander Hernandez60% (20)
- Lenguaje de Programación ArduinoDocumento51 páginasLenguaje de Programación ArduinoRodolfo Víctor Hilario Poma100% (2)
- Matriz de Problemas, Oportunidades, Objetivos y RestriccionesDocumento1 páginaMatriz de Problemas, Oportunidades, Objetivos y RestriccionesFredy Pérez van PersieAún no hay calificaciones
- AbP 3 15 B1 ImplementacionAbP PDFDocumento16 páginasAbP 3 15 B1 ImplementacionAbP PDFJose Luis GregorioAún no hay calificaciones
- AbP 3 15 B1 ImplementacionAbPDocumento7 páginasAbP 3 15 B1 ImplementacionAbPjosezurera6630Aún no hay calificaciones
- Manual Autocad BasicoDocumento21 páginasManual Autocad BasicoKaterin Aliosca FrancisAún no hay calificaciones
- Circuitos Electricos y ElectronicosDocumento1 páginaCircuitos Electricos y Electronicosjosezurera6630Aún no hay calificaciones
- Introduccion A GimpDocumento2 páginasIntroduccion A GimptheimmAún no hay calificaciones
- Digital CroclipDocumento4 páginasDigital CroclipOlga GomezAún no hay calificaciones
- Control DigitalDocumento23 páginasControl DigitalJesus Grover NinaAún no hay calificaciones
- QCad - Ejercicio de VistasDocumento1 páginaQCad - Ejercicio de Vistasjosezurera6630Aún no hay calificaciones
- Termodinamica - Problemas TermodinamicaDocumento11 páginasTermodinamica - Problemas Termodinamicadiegofarias20100% (1)
- Nuevo Metal 3D - EjemploDocumento45 páginasNuevo Metal 3D - EjemploLuciano NerviAún no hay calificaciones
- Tarifas A4Documento19 páginasTarifas A4josezurera6630Aún no hay calificaciones
- Personalizar Librerias en TektonDocumento6 páginasPersonalizar Librerias en Tektonjosezurera6630Aún no hay calificaciones
- 2009-08 Topografia Optimizacion TriangulosDocumento2 páginas2009-08 Topografia Optimizacion Triangulosjosezurera6630Aún no hay calificaciones
- Manual Pce Tds 100Documento24 páginasManual Pce Tds 100josezurera6630Aún no hay calificaciones
- Analisis CombustionDocumento7 páginasAnalisis CombustionJorge BaronAún no hay calificaciones
- Elementos de Separación Vertical Entre Recintos en TektonDocumento6 páginasElementos de Separación Vertical Entre Recintos en Tektonjosezurera6630Aún no hay calificaciones
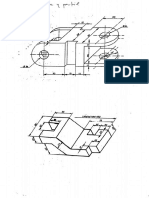
- Ejercicios Obtencion Perspectiva Isometric A A Partir D VistasDocumento9 páginasEjercicios Obtencion Perspectiva Isometric A A Partir D Vistasjosezurera6630Aún no hay calificaciones
- Personalizar Librerias en TektonDocumento6 páginasPersonalizar Librerias en Tektonjosezurera6630Aún no hay calificaciones
- Conexion Allplan y Tekton3DDocumento4 páginasConexion Allplan y Tekton3Djosezurera6630Aún no hay calificaciones
- DIAGRAMA DE MOLLIER AngelDocumento20 páginasDIAGRAMA DE MOLLIER AngeljavierbuitronAún no hay calificaciones
- WSS-PS3-MX - Control de Riesgos de CaídasDocumento17 páginasWSS-PS3-MX - Control de Riesgos de Caídassergio HernandezAún no hay calificaciones
- D4 A2 SESION Expresamos Diversidad Con DanzasDocumento6 páginasD4 A2 SESION Expresamos Diversidad Con Danzasana de la cruzAún no hay calificaciones
- En Defensa de Fujimori - I. CONTEXTO - Su Formacón HistóricaDocumento4 páginasEn Defensa de Fujimori - I. CONTEXTO - Su Formacón HistóricacchlocAún no hay calificaciones
- Dimensión OrganizacionalDocumento20 páginasDimensión OrganizacionalAna María Pacic VigoAún no hay calificaciones
- GL C Sig P For 007 Pets Vigia y CuadradorDocumento15 páginasGL C Sig P For 007 Pets Vigia y CuadradorjesseniaAún no hay calificaciones
- Como Usar El Sistema de Control Modular PDFDocumento24 páginasComo Usar El Sistema de Control Modular PDFGusCortezAún no hay calificaciones
- Diseño PilarDocumento11 páginasDiseño PilarAlexander CuellarAún no hay calificaciones
- UDD Derecho Construcción Andres Merino Contratos, Modalidades EPCDocumento20 páginasUDD Derecho Construcción Andres Merino Contratos, Modalidades EPCPedroAún no hay calificaciones
- Objetivos empresariales según Peter DruckerDocumento2 páginasObjetivos empresariales según Peter DruckerAdolfoAún no hay calificaciones
- Mapa 9 y 10Documento4 páginasMapa 9 y 10erxozuAún no hay calificaciones
- Catalogo Pro-Series HypernovaDocumento22 páginasCatalogo Pro-Series HypernovaGu Zh100% (1)
- Despertar 55Documento24 páginasDespertar 55fernando latrille100% (1)
- XX - Tarea 1 - XXX - XXXXDocumento14 páginasXX - Tarea 1 - XXX - XXXXinocencio albadanAún no hay calificaciones
- 4.-Prueba de Entrada 2020 Seminario de TesisDocumento3 páginas4.-Prueba de Entrada 2020 Seminario de TesisYormanAún no hay calificaciones
- Informe Fisica PiDocumento4 páginasInforme Fisica PiValentina Cabal RestrepoAún no hay calificaciones
- ENSAYO Dinamicas de GrupoDocumento5 páginasENSAYO Dinamicas de Grupodaniela vidalAún no hay calificaciones
- ¿Cuál Es La Productividad de Enfermería - ABAUNZA de GONZÁLEZ - Avances en EnfermeríaDocumento13 páginas¿Cuál Es La Productividad de Enfermería - ABAUNZA de GONZÁLEZ - Avances en EnfermeríaJJ MORENOAún no hay calificaciones
- Sumatoria o Notación SigmaDocumento2 páginasSumatoria o Notación SigmaedwinAún no hay calificaciones
- Yo Me Cuido .Documento4 páginasYo Me Cuido .Nancy Marisol Cabello MirandaAún no hay calificaciones
- Manual Configuracion Servidor de Email en Ubuntu LinuxDocumento58 páginasManual Configuracion Servidor de Email en Ubuntu LinuxFrancisco Aldana HernandezAún no hay calificaciones
- Sistemas de Optimizacion PDFDocumento285 páginasSistemas de Optimizacion PDFZayle PereAsprillaAún no hay calificaciones
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS II - (GRUPO6)Documento11 páginasEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS II - (GRUPO6)Jimena latorreAún no hay calificaciones
- Publicidad y Propaganda 8vo Fech 2017Documento12 páginasPublicidad y Propaganda 8vo Fech 2017Profe Val LierAún no hay calificaciones
- SESION DE APRENDIZAJE - Las Funciones de La SUNAT - 6 GradoDocumento2 páginasSESION DE APRENDIZAJE - Las Funciones de La SUNAT - 6 GradoJunior Aquino Condori50% (2)
- Foro 2Documento2 páginasForo 2Ross StoneAún no hay calificaciones
- Las Cuatro Constelaciones de La PersonalidadDocumento5 páginasLas Cuatro Constelaciones de La PersonalidadCarlos ValdiviaAún no hay calificaciones
- Control de LecturaDocumento3 páginasControl de LecturaZolansh de la CruzAún no hay calificaciones
- Informe Robert AllenDocumento11 páginasInforme Robert AllenERIK LABASTIDA MEDELLINAún no hay calificaciones