También podría gustarte
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- Observables Gps PDFDocumento35 páginasObservables Gps PDFgustavoAún no hay calificaciones
- Observables GPS PDFDocumento86 páginasObservables GPS PDFFavio Coareti McsayAún no hay calificaciones
- Observables Sistema GnssDocumento20 páginasObservables Sistema Gnssdaniel galindoAún no hay calificaciones
- RESUMEN - Capítulo 6Documento7 páginasRESUMEN - Capítulo 6Natali AlvarezAún no hay calificaciones
- Codigos GPSDocumento7 páginasCodigos GPSHenry Douglas Pascual FigueroaAún no hay calificaciones
- Modelos Matematicos Del PosicionamientoDocumento71 páginasModelos Matematicos Del PosicionamientotopotecnicaAún no hay calificaciones
- Preguntas ParcialDocumento4 páginasPreguntas ParcialSe va recalentarAún no hay calificaciones
- Sistema de Posicionamiento GlobalDocumento19 páginasSistema de Posicionamiento GlobalRaúl AguilarAún no hay calificaciones
- 3.3, 3.4 Que Mide El GpsDocumento3 páginas3.3, 3.4 Que Mide El GpsRodrigo Villca paciAún no hay calificaciones
- Cap 6 ObservablesDocumento4 páginasCap 6 ObservablesJunior AlReAún no hay calificaciones
- GPS - Final (Autoguardado)Documento30 páginasGPS - Final (Autoguardado)Gregory Barcia QuindeAún no hay calificaciones
- TEMA 3 Métodos de Posicionamiento Con GNSS en Geodesia Topografía y Geomática PDFDocumento119 páginasTEMA 3 Métodos de Posicionamiento Con GNSS en Geodesia Topografía y Geomática PDFGisell Vanessa Gamboa SandovalAún no hay calificaciones
- Formas de OndaDocumento15 páginasFormas de OndaJavier MachadoAún no hay calificaciones
- TEMA9-Modelos PosicionamientoDocumento47 páginasTEMA9-Modelos PosicionamientoBelen GomezAún no hay calificaciones
- Aporte Punto 2 Fase 4 Cálculo Del RadioenlaceDocumento13 páginasAporte Punto 2 Fase 4 Cálculo Del Radioenlacepcortizs3Aún no hay calificaciones
- Funcionamiento Del GpsDocumento11 páginasFuncionamiento Del GpsarjAún no hay calificaciones
- Resumen GeomaticaDocumento9 páginasResumen GeomaticaKeisy CaballeroAún no hay calificaciones
- B3.4.-Guía de Trabajo 2.1. - Ejercicios Interpretación Ondas Sísmicas - SismogramasDocumento2 páginasB3.4.-Guía de Trabajo 2.1. - Ejercicios Interpretación Ondas Sísmicas - Sismogramasjoan rodaAún no hay calificaciones
- Sesión 10 (23-1)Documento50 páginasSesión 10 (23-1)taipealejandro1Aún no hay calificaciones
- Geodesia Capítulo 1Documento10 páginasGeodesia Capítulo 1NeBuR 86Aún no hay calificaciones
- Cap. 5 SeñalDocumento5 páginasCap. 5 SeñalJunior AlReAún no hay calificaciones
- Radioenlace Terrestre en JAVADocumento6 páginasRadioenlace Terrestre en JAVAArEs2610Aún no hay calificaciones
- Remote Sensing With GPS Signals On Low Earth Orbit SatelliteDocumento6 páginasRemote Sensing With GPS Signals On Low Earth Orbit SatelliteanilltuluAún no hay calificaciones
- Módulo GpsDocumento5 páginasMódulo GpsShikamarux NaraAún no hay calificaciones
- F ASE1Documento16 páginasF ASE1Cristian FajardoAún no hay calificaciones
- Metodo de Triangulacion en GpsDocumento3 páginasMetodo de Triangulacion en GpsJilly Garcia100% (1)
- Informe GPS Diferencial PDFDocumento38 páginasInforme GPS Diferencial PDFMichael Ardiles GiraldoAún no hay calificaciones
- Métodos en Tiempo RealDocumento4 páginasMétodos en Tiempo RealanthonyAún no hay calificaciones
- Christian Erik Urbe Rios - 271047 - 0Documento3 páginasChristian Erik Urbe Rios - 271047 - 0kilder kenio Mallqui AguilarAún no hay calificaciones
- Semana 8 - Artículo - Software para El Enlace SatelitalDocumento5 páginasSemana 8 - Artículo - Software para El Enlace SatelitalNorma CabezasAún no hay calificaciones
- Modelo de Propagacion LeeDocumento58 páginasModelo de Propagacion LeeAngelica CamachoAún no hay calificaciones
- Modelos de Propagacion de RFDocumento58 páginasModelos de Propagacion de RFjavirv19Aún no hay calificaciones
- Tema VI Sistemas de Posicinamiento Global GPSDocumento23 páginasTema VI Sistemas de Posicinamiento Global GPSJpablo AkdAún no hay calificaciones
- Confiabilidad de Radio Enlaces PDFDocumento8 páginasConfiabilidad de Radio Enlaces PDFRaúl InfanteAún no hay calificaciones
- Modelos de Enlace Por SatéliteDocumento9 páginasModelos de Enlace Por SatéliteAnnelis CardenasAún no hay calificaciones
- Informe Gps Diferencial PDFDocumento33 páginasInforme Gps Diferencial PDFEdison Jerson Ramirez ToledoAún no hay calificaciones
- Curso Capacitacion Gps Presentacion PowerpointDocumento86 páginasCurso Capacitacion Gps Presentacion PowerpointMarta Isabel Lescano BustamanteAún no hay calificaciones
- Tarea.04. Lectura - El.gpsDocumento8 páginasTarea.04. Lectura - El.gpsMelissa Barturen DiazAún no hay calificaciones
- David Motta Grupo19 Fase 3Documento40 páginasDavid Motta Grupo19 Fase 3David MttsAún no hay calificaciones
- Informe GPS DiferencialDocumento35 páginasInforme GPS DiferencialDaniel Chipana0% (1)
- (PDS - 2018 - II) Tarea-01Documento7 páginas(PDS - 2018 - II) Tarea-01André Cristhian Canales Canales MezaAún no hay calificaciones
- Geodesia 2Documento22 páginasGeodesia 2Yeber Magno MoralesAún no hay calificaciones
- Generalintroductionradar PDFDocumento133 páginasGeneralintroductionradar PDFJackii AguilarAún no hay calificaciones
- Levantamiento Con GPSDocumento15 páginasLevantamiento Con GPSFRANKLIN REMY FARIAS NOLEAún no hay calificaciones
- Más Menos - Prospección SísmicaDocumento27 páginasMás Menos - Prospección SísmicaDemian LegionAún no hay calificaciones
- Cap 10Documento14 páginasCap 10erosvg43Aún no hay calificaciones
- Cap.04. - La Estima AnaliticaDocumento22 páginasCap.04. - La Estima Analiticaagurz100% (1)
- Calcular La Distancia Entre Dos Puntos Sobre Un Plano Podría Llegar A Ser Relativamente SencilloDocumento5 páginasCalcular La Distancia Entre Dos Puntos Sobre Un Plano Podría Llegar A Ser Relativamente SencilloMariaSotoTaipeAún no hay calificaciones
- Expo Final Pos Procesado EscritoDocumento26 páginasExpo Final Pos Procesado EscritoIgnnel CarranzaAún no hay calificaciones
- Cap.04. - La Estima AnaliticaDocumento22 páginasCap.04. - La Estima AnaliticaHéctor Gerson Oliva UlloaAún no hay calificaciones
- Métrica en Relatividad EspecialDocumento6 páginasMétrica en Relatividad EspecialVictor Cordova GonzalesAún no hay calificaciones
- Capítulo 3 PDFDocumento66 páginasCapítulo 3 PDFAngie MontoyaAún no hay calificaciones
- General Introduction RadarDocumento133 páginasGeneral Introduction RadarNardo Antonio Llanos MatusAún no hay calificaciones
- RS Falta de OxígenoDocumento11 páginasRS Falta de OxígenoDenisse La torre ubillusAún no hay calificaciones
- Practica1 RadiopropaDocumento27 páginasPractica1 RadiopropaGianella MuñozAún no hay calificaciones
- Análisis e Implementación de Diferencial GPS en Configuración Simple y DobleDocumento12 páginasAnálisis e Implementación de Diferencial GPS en Configuración Simple y DoblelewisAún no hay calificaciones
- Presentacion Gps NavstarDocumento29 páginasPresentacion Gps Navstar19894Aún no hay calificaciones
- Informe GPS Diferencial PDFDocumento33 páginasInforme GPS Diferencial PDFDaniel Chipana64% (11)
- Los Efectos en España Del Terremoto de LisboaDocumento756 páginasLos Efectos en España Del Terremoto de LisboaseriosevillaAún no hay calificaciones
- Plan General de Ordenación Urbana de ÁvilaDocumento712 páginasPlan General de Ordenación Urbana de ÁvilaJesus DiazAún no hay calificaciones
- El Expediente de Dominio Tramitado Por ..Documento5 páginasEl Expediente de Dominio Tramitado Por ..Jesus DiazAún no hay calificaciones
- TEMA1 GeodesiaDocumento74 páginasTEMA1 GeodesiaJesus DiazAún no hay calificaciones
- Avila Cinco Siglos DespuesDocumento12 páginasAvila Cinco Siglos DespuesJesus DiazAún no hay calificaciones
- Actas Congreso Las Nuevas Metodologías para La Enseñanza de Las Matemáticas E2Documento532 páginasActas Congreso Las Nuevas Metodologías para La Enseñanza de Las Matemáticas E2Jesus Diaz100% (1)
- Cinematica MonografiaDocumento4 páginasCinematica MonografiaEduard FiElcito Dotero Öf̲̲̅̅ı̲̲̅̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅F̲̲̅̅b0% (1)
- Programacion Anual PrimeroDocumento8 páginasProgramacion Anual PrimeroROCIO DEL MILAGRO FARRO MACALOPUAún no hay calificaciones
- Clase 3 TermoDocumento32 páginasClase 3 Termofranklingarcia2009Aún no hay calificaciones
- CALCULO DIFERENCIAL 21 EneroDocumento1 páginaCALCULO DIFERENCIAL 21 EneroDaniel Camilo SalamancaAún no hay calificaciones
- 4 Integracion+Por+Partes+ Metodo+Tabular+Para+IPDocumento18 páginas4 Integracion+Por+Partes+ Metodo+Tabular+Para+IPjohe67100% (1)
- D83a02 G11Cs6Documento5 páginasD83a02 G11Cs6Margarita ClementeAún no hay calificaciones
- Solucionario Ecuaciones Diferenciales - Ing Juan Pablo CamachoDocumento149 páginasSolucionario Ecuaciones Diferenciales - Ing Juan Pablo CamachoJuanpi CamachoAún no hay calificaciones
- 1.1-TEC - Diseño de Compensadores en El Dominio Del TiempoDocumento129 páginas1.1-TEC - Diseño de Compensadores en El Dominio Del TiempoChristian DanielAún no hay calificaciones
- Magnitud AdimensionalDocumento11 páginasMagnitud AdimensionalJohnGonzalezAún no hay calificaciones
- Tarea de Topo 3Documento10 páginasTarea de Topo 3Jahzeel Romero EspejoAún no hay calificaciones
- Análisis de Las Condiciones de Trabajo Con Expocision Al Ruido.Documento10 páginasAnálisis de Las Condiciones de Trabajo Con Expocision Al Ruido.Yandry Chamba100% (1)
- Lewis CarrollDocumento8 páginasLewis CarrollBehelmotAún no hay calificaciones
- Funciones Ejercicios Varios22Documento9 páginasFunciones Ejercicios Varios22fabianAún no hay calificaciones
- Iper VeterinariaDocumento55 páginasIper VeterinariaDiego Nieves Flores100% (5)
- Guia 11 GradoDocumento14 páginasGuia 11 Gradokatherine Ariza SilvaAún no hay calificaciones
- Inteligencia Artificial AiDocumento6 páginasInteligencia Artificial AiBTy CAAún no hay calificaciones
- PolipastoDocumento3 páginasPolipastoJosse CeervantesAún no hay calificaciones
- Blanco, Desiderio & Bueno, Raúl (1980) - Metodología Del Análisis Semiótico PDFDocumento285 páginasBlanco, Desiderio & Bueno, Raúl (1980) - Metodología Del Análisis Semiótico PDFEugenio Mario Garcia Ysla100% (2)
- Analisis Del Articulo Rayleigh-FadingDocumento6 páginasAnalisis Del Articulo Rayleigh-FadingBrian Quinde SaltosAún no hay calificaciones
- Interrogación #1: PN (T) PR (N (T) N) - Demuestre Que para Todo N 0 Se Cumple Que: D DT PN (T)Documento2 páginasInterrogación #1: PN (T) PR (N (T) N) - Demuestre Que para Todo N 0 Se Cumple Que: D DT PN (T)isaak husserlAún no hay calificaciones
- Modalidades de La ProrrataDocumento5 páginasModalidades de La Prorratadamaris carbonellAún no hay calificaciones
- Sem 3 - Sesión 7 - Transformación de Funciones (Traslación Vertical y Horizontal)Documento17 páginasSem 3 - Sesión 7 - Transformación de Funciones (Traslación Vertical y Horizontal)luz leon maldonadoAún no hay calificaciones
- Tres Efe DosDocumento8 páginasTres Efe DosvladimirAún no hay calificaciones
- Diagrama de Bloques de Un Sistema en Lazo CerradoDocumento2 páginasDiagrama de Bloques de Un Sistema en Lazo CerradoPipe Tovar100% (2)
- Examen Matematicas 4Documento4 páginasExamen Matematicas 4Genaro BermudezAún no hay calificaciones
- Resumen Del Resumen Educacional Parcial 1Documento10 páginasResumen Del Resumen Educacional Parcial 1Gabii FernandezAún no hay calificaciones
- FisicaDocumento13 páginasFisicaRobert Alexander Florez ParedesAún no hay calificaciones
- Apuntes FuncionesDocumento13 páginasApuntes FuncionesGuido Germán AndrésAún no hay calificaciones
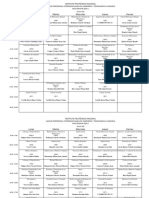
- HORARIOS 2024-1v2Documento71 páginasHORARIOS 2024-1v2Humberto RodAún no hay calificaciones
- ARI Tema 1 Introducción A La Robotica PDFDocumento47 páginasARI Tema 1 Introducción A La Robotica PDFJose Manuel Paez RomeroAún no hay calificaciones