También podría gustarte
- Vectores en r3Documento12 páginasVectores en r3luis falconesAún no hay calificaciones
- Mario Chavez - Calculo en Varias VariablesDocumento430 páginasMario Chavez - Calculo en Varias VariablesVANEZA RAMOSAún no hay calificaciones
- Vectores r3Documento22 páginasVectores r3José Manuel T MarrufoAún no hay calificaciones
- Ejercicios en R3Documento4 páginasEjercicios en R3miguel tarazonaAún no hay calificaciones
- Historia de La Teoria de NumerosDocumento10 páginasHistoria de La Teoria de Numerosleef98Aún no hay calificaciones
- 6.01 Superficies-CuadricasDocumento7 páginas6.01 Superficies-CuadricasE Yhosmil CYAún no hay calificaciones
- Desigualdad de EulerDocumento13 páginasDesigualdad de Eulerpaulcesarfim6840Aún no hay calificaciones
- Análisis Matemático I - Parametrización de Curvas PlanasDocumento23 páginasAnálisis Matemático I - Parametrización de Curvas PlanasJhonatan Melqui Alcántara VegaAún no hay calificaciones
- Vectores en R2Documento4 páginasVectores en R2josemigueell100% (1)
- Teoría Elemental de CamposDocumento9 páginasTeoría Elemental de CamposVictor Martin SantamariaAún no hay calificaciones
- Variedad LinealDocumento4 páginasVariedad LinealAmIn20122Aún no hay calificaciones
- Dennis Urbina - Tarea 1 - Vectores, Matrices y DeterminantesDocumento12 páginasDennis Urbina - Tarea 1 - Vectores, Matrices y DeterminantesFabian RomeroAún no hay calificaciones
- Tema 8. Ecuación Punto-Pendiente de Una RectaDocumento8 páginasTema 8. Ecuación Punto-Pendiente de Una RectaE&G100% (1)
- UNIDAD I - Geometría AnalíticaDocumento27 páginasUNIDAD I - Geometría AnalíticaEstudiantesUpel100% (1)
- Centros Del TriánguloDocumento1 páginaCentros Del TriánguloKarman Z ZedAún no hay calificaciones
- Como Estudiar MatematicasDocumento4 páginasComo Estudiar MatematicasNadia Elizondo100% (1)
- Aprender A EstudiarDocumento9 páginasAprender A EstudiarveronicaAún no hay calificaciones
- 9.1 EJERCICIOS Bosquejo de La Gráfica de Una FunciónDocumento6 páginas9.1 EJERCICIOS Bosquejo de La Gráfica de Una FunciónJ Luis MlsAún no hay calificaciones
- Aritmética ModularDocumento12 páginasAritmética ModularHector GuerraAún no hay calificaciones
- Análisis Gráfico PDFDocumento7 páginasAnálisis Gráfico PDFWilson MartinezAún no hay calificaciones
- Geometria de Las Figuras PlanasDocumento14 páginasGeometria de Las Figuras PlanasClauPerez100% (17)
- Sucesiones AritmeticasDocumento41 páginasSucesiones AritmeticasJhoan MaflaAún no hay calificaciones
- VolúmenesDocumento4 páginasVolúmenesClaudiaAún no hay calificaciones
- 2fisica 010Documento56 páginas2fisica 010Freddy Quispe Corahua100% (1)
- Vectores Rectas Planos PDFDocumento42 páginasVectores Rectas Planos PDFluis alfredo lara ramosAún no hay calificaciones
- Álgebra Lineal Problemas Resueltos Ma. Isabel García Planas PDFDocumento62 páginasÁlgebra Lineal Problemas Resueltos Ma. Isabel García Planas PDFEddy. A0% (1)
- Solucionario de Integrales Indefinidas PDFDocumento176 páginasSolucionario de Integrales Indefinidas PDFChristian Camilo Eraso MoranAún no hay calificaciones
- Aprender A FactorizarDocumento4 páginasAprender A FactorizarJaime Soto VicencioAún no hay calificaciones
- 06 Espacios VectorialesDocumento9 páginas06 Espacios VectorialesAlejandro Marrero PeiranAún no hay calificaciones
- Integracion Funciones Racionales Seno CosenoDocumento5 páginasIntegracion Funciones Racionales Seno CosenoRuben Vega B0% (1)
- Historia Del Cálculo DiferencialDocumento12 páginasHistoria Del Cálculo DiferencialMisioneras MsjbAún no hay calificaciones
- CM Matematicas DiscretasDocumento7 páginasCM Matematicas DiscretasandresAún no hay calificaciones
- EJercicios de Equipotencia y CardinalidadDocumento2 páginasEJercicios de Equipotencia y CardinalidadJuanFelipeBuitragoVelez0% (1)
- Segunda Exposición PDFDocumento32 páginasSegunda Exposición PDFAndhy DiazAún no hay calificaciones
- 3er. Año - ARIT - Guía 1 - Conjunto de Los Números IrracionalDocumento5 páginas3er. Año - ARIT - Guía 1 - Conjunto de Los Números IrracionalmiguelAún no hay calificaciones
- 02 Nota Clase ConjuntosDocumento62 páginas02 Nota Clase ConjuntosJosue BaldeonAún no hay calificaciones
- Problemas Resueltos de MatematicasDocumento24 páginasProblemas Resueltos de Matematicascarmelo rhenals otero0% (1)
- Teorema Cayley Hamilton 2Documento4 páginasTeorema Cayley Hamilton 2Dagoberto de la FuenteAún no hay calificaciones
- Series y Sucesiones PDFDocumento3 páginasSeries y Sucesiones PDFCoquitoMazelAún no hay calificaciones
- Demostración de Las Fórmulas Del Seno Coseno y Tangente de La Suma y de La Resta de ÁngulosDocumento7 páginasDemostración de Las Fórmulas Del Seno Coseno y Tangente de La Suma y de La Resta de ÁngulosJsidfnAún no hay calificaciones
- Ejemplo de IsomorfismoDocumento1 páginaEjemplo de IsomorfismoSalvador BrorAún no hay calificaciones
- La DerivadaDocumento69 páginasLa DerivadaDamianCervantes100% (1)
- Solucionario Análisis Matemático - ApóstolDocumento7 páginasSolucionario Análisis Matemático - ApóstolCamilo LozanoAún no hay calificaciones
- Mis Clases de Matematicas 1Documento81 páginasMis Clases de Matematicas 1otonielAún no hay calificaciones
- 2M Unidad 2 - Movimiento - Marco y Sistema de ReferenciaDocumento18 páginas2M Unidad 2 - Movimiento - Marco y Sistema de ReferenciaPaula Durán Ávila100% (1)
- Taller Sobre Razones TrigonometricasDocumento1 páginaTaller Sobre Razones TrigonometricasObatala En El Paisaje NoctambuloAún no hay calificaciones
- Concavidad y Convexidad Grupo 8Documento8 páginasConcavidad y Convexidad Grupo 8Maycol RamirezAún no hay calificaciones
- Calculo Vectorial Unidad 1Documento12 páginasCalculo Vectorial Unidad 1Oziel DominguezAún no hay calificaciones
- Física y Química 1º BachilleratoDocumento125 páginasFísica y Química 1º BachilleratoJoaquinaAún no hay calificaciones
- Calculo VectorialDocumento9 páginasCalculo VectorialSebastián SandovalAún no hay calificaciones
- Listado1 CALCULOIIIDocumento2 páginasListado1 CALCULOIIIGuillermo Araya HuertaAún no hay calificaciones
- Estatica 1Documento53 páginasEstatica 1MarcOz Quiñones LojaAún no hay calificaciones
- 1.2 Taller de VectoresDocumento25 páginas1.2 Taller de VectoresDaniel MulloAún no hay calificaciones
- UNIDAD IV Vectores y Superficies en El EspacioDocumento17 páginasUNIDAD IV Vectores y Superficies en El EspacioGUARDADO JIMENEZ CESAR ANDRESAún no hay calificaciones
- Vectores y Matrices - Ejercicios PropuestosDocumento4 páginasVectores y Matrices - Ejercicios PropuestoslahidalgopAún no hay calificaciones
- Radiación Electromagnética..Documento19 páginasRadiación Electromagnética..rominasl100% (1)
- Leica ICC50HD Brochure ESDocumento3 páginasLeica ICC50HD Brochure ESrominaslAún no hay calificaciones
- INFORME #5 Radiación de Cuerpo NegroDocumento7 páginasINFORME #5 Radiación de Cuerpo NegrorominaslAún no hay calificaciones
- Trabajo Practico 2 Dispositivos ElectronicosDocumento4 páginasTrabajo Practico 2 Dispositivos ElectronicosrominaslAún no hay calificaciones
- Secuencia Didáctica Sobre Cristalografía 2019 PDFDocumento11 páginasSecuencia Didáctica Sobre Cristalografía 2019 PDFAlejandro SagginAún no hay calificaciones
- Manual de OpmanagerDocumento65 páginasManual de Opmanageryurley14Aún no hay calificaciones
- Manual s10 BasicoDocumento65 páginasManual s10 Basicoalberto saulAún no hay calificaciones
- Fluidoss 2Documento4 páginasFluidoss 2Sebastian MontanoAún no hay calificaciones
- DiseDocumento495 páginasDiseEmmanuel Constantino VargasAún no hay calificaciones
- Fenomenos NaturalesDocumento18 páginasFenomenos NaturalesIvann CabreraAún no hay calificaciones
- Aguas ResidualesDocumento8 páginasAguas ResidualesPablo Verastegui VargasAún no hay calificaciones
- Alter ProcedureDocumento11 páginasAlter ProcedureLight17Aún no hay calificaciones
- Adolf LoosDocumento13 páginasAdolf LoosAna García HeviaAún no hay calificaciones
- Cálculo y Selección de Intercambiadores de CalorDocumento9 páginasCálculo y Selección de Intercambiadores de CalorRené Rocha MolinaAún no hay calificaciones
- Reglamento de Asilacion y BloqueoDocumento16 páginasReglamento de Asilacion y BloqueoGabriela ArancibiaAún no hay calificaciones
- Programa de Máquinas Eléctricas IIIDocumento4 páginasPrograma de Máquinas Eléctricas IIIJulian NietoAún no hay calificaciones
- 0 Manual Respuestos BombasDocumento70 páginas0 Manual Respuestos BombasjvespaAún no hay calificaciones
- Investigacion Sobre Las Bombas Que Se Pueden Utilizar en El Sistema Hidraulico y Sanitario en El Ambito MundialDocumento9 páginasInvestigacion Sobre Las Bombas Que Se Pueden Utilizar en El Sistema Hidraulico y Sanitario en El Ambito MundialMARIA JOSE FUNES BARDALESAún no hay calificaciones
- Configuración de Conexión Heterogenia Desde ORACLE A PostgreSQL en Ambiente de Trabajo WINDOWSDocumento6 páginasConfiguración de Conexión Heterogenia Desde ORACLE A PostgreSQL en Ambiente de Trabajo WINDOWSPatricio PérezAún no hay calificaciones
- DocumentosDocumento4 páginasDocumentosAndres Leonardo Villanueva MoralesAún no hay calificaciones
- Globalización y Crisis Del Estado BienestarDocumento15 páginasGlobalización y Crisis Del Estado BienestarCarlos Carrasco MunozAún no hay calificaciones
- CM Diseño Tecnico Sierra HW (25!05!15)Documento20 páginasCM Diseño Tecnico Sierra HW (25!05!15)Anonymous iX6pDSyv3GAún no hay calificaciones
- UCVDocumento14 páginasUCVDiego EstradaAún no hay calificaciones
- PP Malchaire Guia Deparis 2002 PDFDocumento24 páginasPP Malchaire Guia Deparis 2002 PDFDanny Gómez RondónAún no hay calificaciones
- Trabajo Analisis EstructuralDocumento2 páginasTrabajo Analisis EstructuraljhonatanAún no hay calificaciones
- Proyecto Final GildanDocumento29 páginasProyecto Final GildanGustavo HerreraAún no hay calificaciones
- Taller TaylorDocumento6 páginasTaller Tayloranon_581079989Aún no hay calificaciones
- Ficha Ruc PDFDocumento2 páginasFicha Ruc PDFobdulia maruja huallpa alvarezAún no hay calificaciones
- Carpeta Al Que MadrugaDocumento76 páginasCarpeta Al Que MadrugaMateo RestrepoAún no hay calificaciones
- Tutorial Sobre Utilización Del Sistema Web de Reserva de Aulas TicDocumento6 páginasTutorial Sobre Utilización Del Sistema Web de Reserva de Aulas TicTIC_BatanAún no hay calificaciones
- EmpedradoDocumento160 páginasEmpedradoRodrigo SandovalAún no hay calificaciones
- Metodo VancouverDocumento6 páginasMetodo VancouverMarianaFdz0% (1)
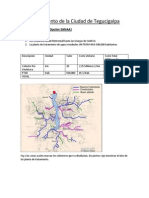
- Saneamiento de La Ciudad de TegucigalpaDocumento5 páginasSaneamiento de La Ciudad de TegucigalpavjcuevasAún no hay calificaciones