También podría gustarte
- Cali, Santa Elena-15-11-2022Documento4 páginasCali, Santa Elena-15-11-2022Jefferson ManuelAún no hay calificaciones
- Cali, Cavasa-03-11-2022Documento2 páginasCali, Cavasa-03-11-2022Jefferson ManuelAún no hay calificaciones
- Medellín, Central Mayorista de Antioquia-03!11!2022Documento6 páginasMedellín, Central Mayorista de Antioquia-03!11!2022Jefferson ManuelAún no hay calificaciones
- YaraVita TEPROSYN CO-MO 1.1 20191002Documento14 páginasYaraVita TEPROSYN CO-MO 1.1 20191002Jefferson ManuelAún no hay calificaciones
- Ficha Tecnica Euler Fosforado-0001Documento3 páginasFicha Tecnica Euler Fosforado-0001Jefferson ManuelAún no hay calificaciones
- Ficha Tecnica Fourier Alfa RiegoDocumento5 páginasFicha Tecnica Fourier Alfa RiegoJefferson ManuelAún no hay calificaciones
- Ficha Tecnica Euler Potasico-1Documento3 páginasFicha Tecnica Euler Potasico-1Jefferson ManuelAún no hay calificaciones
- Cali, Santa Elena-19!07!2022Documento4 páginasCali, Santa Elena-19!07!2022Jefferson ManuelAún no hay calificaciones
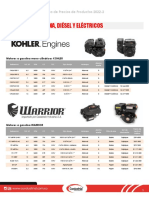
- Precios Productos 2022-2Documento21 páginasPrecios Productos 2022-2Jefferson ManuelAún no hay calificaciones
- Desgaste Abrasivo en RodamientosDocumento9 páginasDesgaste Abrasivo en RodamientosJefferson ManuelAún no hay calificaciones
- Las Variables de EstadoDocumento4 páginasLas Variables de EstadoORLANDO RODRIGUEZAún no hay calificaciones
- Modelado de Motores CCDocumento14 páginasModelado de Motores CCKevin Pato MosqueraAún no hay calificaciones
- Asignación #3 - Observabilidad y Controlabilidad de Un Sistema Péndulo Invertido TraslacionalDocumento21 páginasAsignación #3 - Observabilidad y Controlabilidad de Un Sistema Péndulo Invertido TraslacionalErwin Geovanni Villalobos GutiérrezAún no hay calificaciones
- Guia TPTP 2007 Rev2Documento86 páginasGuia TPTP 2007 Rev2Gerardo MediabillaAún no hay calificaciones
- P07 MSS Reyna Barrientos Samuel Uriel Jue1819Documento9 páginasP07 MSS Reyna Barrientos Samuel Uriel Jue1819Samuel Uriel Reyna BarrientosAún no hay calificaciones
- Preguntas Sistemas de ControlDocumento9 páginasPreguntas Sistemas de ControlToby Diego Fernando Tapia LozadaAún no hay calificaciones
- Modelos en Variables de Estado CAPITULO 3-1Documento44 páginasModelos en Variables de Estado CAPITULO 3-1César Aguilar100% (1)
- 1º Actividad de Evaluación. Modelado de Sistemas DinámicosDocumento3 páginas1º Actividad de Evaluación. Modelado de Sistemas DinámicosSuperiorityAún no hay calificaciones
- Sist Control Ii If 7Documento8 páginasSist Control Ii If 7Joel IparraguirreAún no hay calificaciones
- Control ModernoDocumento12 páginasControl ModernoMiguelAngelJaureguiAún no hay calificaciones
- Controlabilidad y ObservabilidadDocumento8 páginasControlabilidad y ObservabilidadJuan Carlos PazmiñoAún no hay calificaciones
- Ejercicio de Ecuaciones de EstadoDocumento27 páginasEjercicio de Ecuaciones de EstadoMiguel Angel Gómez PérezAún no hay calificaciones
- Espacio de EstadoDocumento25 páginasEspacio de EstadoFrancisco Zavala MadariagaAún no hay calificaciones
- Proyecto Modelado de Sistema de ControlDocumento25 páginasProyecto Modelado de Sistema de ControlJuan Sebastian Diaz CuadrosAún no hay calificaciones
- Proyecto Etn-640Documento22 páginasProyecto Etn-640MILTON CABRERAAún no hay calificaciones
- H0574 Guia de Estudio Control DigitalDocumento7 páginasH0574 Guia de Estudio Control DigitalFrancisco VillalobosAún no hay calificaciones
- Ejemplo Antena Como Sistema Mecatronico (28-53) .En - EsDocumento26 páginasEjemplo Antena Como Sistema Mecatronico (28-53) .En - EsGuillermoRafaelChockDjEMAún no hay calificaciones
- Practica 07 Conversion de ModelosDocumento4 páginasPractica 07 Conversion de Modeloscesar Dice HolaAún no hay calificaciones
- CAI Apuntes 05Documento20 páginasCAI Apuntes 05Ruben VelazquezAún no hay calificaciones
- Sistemas DinamicosDocumento291 páginasSistemas DinamicosLuz Nidya Villa100% (1)
- Clase 6 Espacio de EstadosDocumento22 páginasClase 6 Espacio de Estadosdarioanael1978Aún no hay calificaciones
- Tarea4etodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo18 PistoDocumento8 páginasTarea4etodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo18 Pistoluis andres ramosAún no hay calificaciones
- Diseño Control PID Espacio EstadosDocumento20 páginasDiseño Control PID Espacio EstadosjavierAún no hay calificaciones
- Diseño de Sistemas de Control en El Espacio de Estados.Documento12 páginasDiseño de Sistemas de Control en El Espacio de Estados.Jorge A. Zambrano CorreaAún no hay calificaciones
- Informe 2 Grupo6 Capitulo1Documento11 páginasInforme 2 Grupo6 Capitulo1Edgar EnriquezAún no hay calificaciones
- Guia de Laboratorio de Teoria de Control Automatico 1 PDFDocumento74 páginasGuia de Laboratorio de Teoria de Control Automatico 1 PDFMILAGROS CARMEN SEVINCHA YANAAún no hay calificaciones
- Modelado de Sistemas MecatronicosDocumento10 páginasModelado de Sistemas MecatronicosNicolasDavidSalazarMorenoAún no hay calificaciones
- Act#6Documento4 páginasAct#6Oscar SanchezAún no hay calificaciones