También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Un Carrito Seguidor de Linea SencilloDocumento17 páginasUn Carrito Seguidor de Linea SencilloAraceli Gutierrez CampuzanoAún no hay calificaciones
- Detector de HumedadDocumento10 páginasDetector de HumedadMilton Octavio GarcíaAún no hay calificaciones
- Control para Motor CC Usando Un OPDocumento8 páginasControl para Motor CC Usando Un OPAlan Huayanca LeónAún no hay calificaciones
- Un Carrito Seguidor de Linea SencilloDocumento8 páginasUn Carrito Seguidor de Linea SencilloMag BautistaAún no hay calificaciones
- Esquema Electrónico de Conexión Del Sensor CNY70Documento3 páginasEsquema Electrónico de Conexión Del Sensor CNY70Yune Cruz Rodriguez100% (1)
- EE Taller 2 Maldonado ADocumento6 páginasEE Taller 2 Maldonado AAlejandro MaldonadoAún no hay calificaciones
- Medicion de TransistorDocumento4 páginasMedicion de TransistorALBERTO STEPHANO REYNOSO MATOSAún no hay calificaciones
- Instrumentacion IndustrialDocumento141 páginasInstrumentacion IndustrialJose Montenegro SotoAún no hay calificaciones
- Proyectos ElectronicosDocumento5 páginasProyectos ElectronicosGiovanny Burgos100% (1)
- Como Medir VoltajesDocumento9 páginasComo Medir VoltajesArmando Nabuconodosor HilmanAún no hay calificaciones
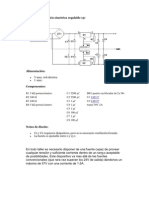
- Fuente Alimentación Simétrica Regulable 15vDocumento18 páginasFuente Alimentación Simétrica Regulable 15vHernandez Adan0% (1)
- Circuitos de Instrumentos para El TallerDocumento21 páginasCircuitos de Instrumentos para El Tallerluis manuelAún no hay calificaciones
- Chequeo de Transistores Bipolares, MosFET e IGBTDocumento19 páginasChequeo de Transistores Bipolares, MosFET e IGBTANGEL_10_10100% (1)
- Practicas CocodrileDocumento13 páginasPracticas CocodrileprofejuliozAún no hay calificaciones
- Como Hacer Un Cargador de Baterias AutomaticoDocumento19 páginasComo Hacer Un Cargador de Baterias AutomaticoGerardo MondragonAún no hay calificaciones
- Cómo Comprobar Los Componentes Electrónicos BásicosDocumento17 páginasCómo Comprobar Los Componentes Electrónicos BásicosJosé Sánchez100% (1)
- TEMA 2 Practica TransistorDocumento9 páginasTEMA 2 Practica TransistorHéctorivan UrbanoAún no hay calificaciones
- Seguidor de LineaDocumento7 páginasSeguidor de LineaAndicitaaaaAún no hay calificaciones
- Fuentes PCDocumento11 páginasFuentes PCpruebantaresAún no hay calificaciones
- Informe - Construccion Del Amplificador 200w PDFDocumento13 páginasInforme - Construccion Del Amplificador 200w PDFE Wilder VillagomezAún no hay calificaciones
- TPN AvanzarDocumento8 páginasTPN AvanzarCaro AguirreAún no hay calificaciones
- Herramientas de Prueba CaserasDocumento9 páginasHerramientas de Prueba CaserasRafael Medina100% (1)
- Técnicas de ReparaciónDocumento24 páginasTécnicas de ReparaciónElvisnosalgas regresayaAún no hay calificaciones
- En Principio El Circuito de Una Fuente Dual Simetrica Está en El Datasheet de LM317Documento5 páginasEn Principio El Circuito de Una Fuente Dual Simetrica Está en El Datasheet de LM317joseluis22512Aún no hay calificaciones
- Fuente de Alimentacion Con Voltimetro y AmperimetroDocumento20 páginasFuente de Alimentacion Con Voltimetro y AmperimetroBrian Apolo PeñalozaAún no hay calificaciones
- CapacitoresDocumento43 páginasCapacitoresMedardo ApoloAún no hay calificaciones
- t3 Sensores E1Documento7 páginast3 Sensores E1Victor BojorquezAún no hay calificaciones
- Robot Seguidor de Lineas Negras Con 6 TransistoresDocumento4 páginasRobot Seguidor de Lineas Negras Con 6 TransistoresJkarlos ZLeon67% (3)
- Como Medir Un Puente de DiiodosDocumento23 páginasComo Medir Un Puente de DiiodosRuMarlop Martinez100% (2)
- Tarjetas Electronicas de A.A. y R.Documento29 páginasTarjetas Electronicas de A.A. y R.Segundo C. G.Aún no hay calificaciones
- Practicas ElectronicaDocumento13 páginasPracticas ElectronicacarabantesAún no hay calificaciones
- Acontinuacion Les Explicare Como Hacer Una Fuente de Voltaje Con Un Lm317 de 0v A 30vDocumento11 páginasAcontinuacion Les Explicare Como Hacer Una Fuente de Voltaje Con Un Lm317 de 0v A 30vCristianAún no hay calificaciones
- Testeo de Componentes (Thesergioscorner)Documento9 páginasTesteo de Componentes (Thesergioscorner)Oswaldo GonzalezAún no hay calificaciones
- Testeo de Componentes (Thesergioscorner)Documento9 páginasTesteo de Componentes (Thesergioscorner)Oswaldo GonzalezAún no hay calificaciones
- Hacer Fuente at o ATX de PC Variable Desde 1V Hasta Los 27V Sin LM317Documento4 páginasHacer Fuente at o ATX de PC Variable Desde 1V Hasta Los 27V Sin LM317GustavoGuevara100% (2)
- 32 TV Chino No Prende Modelo 510373 Chasis CY8873CDocumento13 páginas32 TV Chino No Prende Modelo 510373 Chasis CY8873Cmaria ardilesAún no hay calificaciones
- Diagrama de Bombillos Ahorrador de Luz CFLDocumento11 páginasDiagrama de Bombillos Ahorrador de Luz CFLfelix67% (3)
- Seguidor de LineaDocumento11 páginasSeguidor de Lineaconeja0975% (4)
- Cómo Comprobar Los Componentes Electrónicos BásicosDocumento11 páginasCómo Comprobar Los Componentes Electrónicos BásicosVictor Manuel Leon CardenasAún no hay calificaciones
- Procedimiento para Reparar +B FluctuanteDocumento16 páginasProcedimiento para Reparar +B Fluctuanteoscar marinAún no hay calificaciones
- Procedimiento Básico para Reparar Fuentes de PCDocumento37 páginasProcedimiento Básico para Reparar Fuentes de PCefraperu67% (3)
- Capacimetro e Metro Con PIC16F84 o PIC16F628Documento9 páginasCapacimetro e Metro Con PIC16F84 o PIC16F628UfoLeds CncAún no hay calificaciones
- Como Medir Componentes Con El Multímetro yDocumento5 páginasComo Medir Componentes Con El Multímetro yFRANCISCO-LUNARAún no hay calificaciones
- Como Probar ElectronicosDocumento7 páginasComo Probar ElectronicosAnonymous f8NjntbOAún no hay calificaciones
- Comprobar Componentes ElectronicosDocumento12 páginasComprobar Componentes ElectronicosWillian Rojas100% (1)
- Aplicaciones Con TransistoresDocumento8 páginasAplicaciones Con TransistoresRaul ChoqueAún no hay calificaciones
- Calibración Probador de Transistor Ruso de FNIRSI Mega 328Documento4 páginasCalibración Probador de Transistor Ruso de FNIRSI Mega 328Jose Fernandez LopezAún no hay calificaciones
- Prueba de CapacitoresDocumento6 páginasPrueba de CapacitoresVicenteMarioHernándezGonzálezAún no hay calificaciones
- Procedimiento Básico para Reparar Fuentes de PCDocumento4 páginasProcedimiento Básico para Reparar Fuentes de PCJuan Jose VidelaAún no hay calificaciones
- Midiendo Tensión Alterna, Circuitos. - Español - Hardware - Arduino ForumDocumento17 páginasMidiendo Tensión Alterna, Circuitos. - Español - Hardware - Arduino ForumIngeniero en boberíaAún no hay calificaciones
- Inductometro y CapacimetroDocumento10 páginasInductometro y CapacimetroHenry CastandAún no hay calificaciones
- Apae 190Documento9 páginasApae 190killerbee444Aún no hay calificaciones
- Prueba de Componentes Electrónicos2Documento6 páginasPrueba de Componentes Electrónicos2MONTERO77Aún no hay calificaciones
- Determinación Del Patillaje de Un TransistorDocumento6 páginasDeterminación Del Patillaje de Un TransistorStiva DarcyAún no hay calificaciones
- Fuente InformeDocumento6 páginasFuente InformeAlex TarquinoAún no hay calificaciones
- 100 Circuitos de Proyectos EducacionalesDe Everand100 Circuitos de Proyectos EducacionalesCalificación: 5 de 5 estrellas5/5 (2)
- Construcción de Significados Del Texto LiterarioDocumento6 páginasConstrucción de Significados Del Texto Literariofabioluis12Aún no hay calificaciones
- 6 Liters JuegoDocumento2 páginas6 Liters Juegofabioluis12Aún no hay calificaciones
- Biografía Andrés L MateoDocumento1 páginaBiografía Andrés L Mateofabioluis12Aún no hay calificaciones
- Pensum ManufacturaDocumento2 páginasPensum Manufacturafabioluis12Aún no hay calificaciones
- Pensum MecatronicaDocumento2 páginasPensum Mecatronicafabioluis12Aún no hay calificaciones
- Solucion Problemas Concurso de Matemática Por TV 2006Documento23 páginasSolucion Problemas Concurso de Matemática Por TV 2006fabioluis12Aún no hay calificaciones
- 3 ES-PT-103-FV - Escaleras Dielétricas Extensión 3C PDFDocumento1 página3 ES-PT-103-FV - Escaleras Dielétricas Extensión 3C PDFJhon Jairo ValenciaAún no hay calificaciones
- SWITCH Allied Telesis At-Fs980m28 Bps ESDocumento76 páginasSWITCH Allied Telesis At-Fs980m28 Bps ESJoel GarduñoAún no hay calificaciones
- C - COCINA Metrados IE 06-12-19Documento150 páginasC - COCINA Metrados IE 06-12-19Roly Pariona SilvaAún no hay calificaciones
- Mantenimiento: ContenidosDocumento34 páginasMantenimiento: ContenidosSr. PolestarAún no hay calificaciones
- Endress-Hauser RTD Thermometer TR10 ESDocumento4 páginasEndress-Hauser RTD Thermometer TR10 ESjhorlanAún no hay calificaciones
- Todos Los Códigos de Electricidad en Estados UnidosDocumento22 páginasTodos Los Códigos de Electricidad en Estados Unidosmusiadorno 2023100% (1)
- SWAN QUAD - En.esDocumento2 páginasSWAN QUAD - En.esisrael peñaAún no hay calificaciones
- Maquinas para TornearDocumento22 páginasMaquinas para TornearBrigido ValerioAún no hay calificaciones
- S01 Sistemas Equipos y Dispositivos de Control v5Documento51 páginasS01 Sistemas Equipos y Dispositivos de Control v5Sergi Quispe ChaiñaAún no hay calificaciones
- Sistemas de AlarmasDocumento30 páginasSistemas de AlarmasDavid AriasAún no hay calificaciones
- Instalación FSMFDocumento20 páginasInstalación FSMFJavier Ramirez81% (16)
- Informe-Tractor-Agricola GABY - CompressedDocumento29 páginasInforme-Tractor-Agricola GABY - CompressedGabriela Ayovi GuevaraAún no hay calificaciones
- 04 Ii - EeDocumento40 páginas04 Ii - EeJAVIER SIESQUENAún no hay calificaciones
- Motoperimetro 04158 - 4162 - 4164m03 Cubre CarterDocumento2 páginasMotoperimetro 04158 - 4162 - 4164m03 Cubre CarterJyanAún no hay calificaciones
- Manual Johansson 6605Documento24 páginasManual Johansson 6605Javier Ruiz Perea100% (1)
- Manual Hero Thriller 200Documento90 páginasManual Hero Thriller 200juan jose montoyaAún no hay calificaciones
- (Word) Capítulo 7 Equipos Portátiles y Otros Dispositivos MóvilesDocumento18 páginas(Word) Capítulo 7 Equipos Portátiles y Otros Dispositivos MóvilesOdelfin RodriguezAún no hay calificaciones
- Manual Up! 2015 PDFDocumento249 páginasManual Up! 2015 PDFuiyiguayeAún no hay calificaciones
- Generaciones de Las ComputadorasDocumento10 páginasGeneraciones de Las ComputadorasJesusDavidLosanoSierraAún no hay calificaciones
- Presentación Microsoft SurfaceDocumento11 páginasPresentación Microsoft SurfacemelkorroAún no hay calificaciones
- LabMEII Preparatorio7 GR1ADocumento8 páginasLabMEII Preparatorio7 GR1ACamilo QuintoAún no hay calificaciones
- Cálculos de La Fuente Fija y VariableDocumento7 páginasCálculos de La Fuente Fija y VariablePao JP0% (1)
- Folha Resgate KICKS 2023Documento1 páginaFolha Resgate KICKS 2023Rodrigo HussAún no hay calificaciones
- Cestek 1Documento16 páginasCestek 1Rodolfo CardenasAún no hay calificaciones
- Modificacion Del Motor PWM - OdtDocumento9 páginasModificacion Del Motor PWM - OdtMagaña Maceda Oliver OswaldoAún no hay calificaciones
- Manual MantenimientoDocumento12 páginasManual MantenimientoGenaro Perez Martinez100% (1)
- SEMANA 2 - Ejercicio de Ordenación de RegistrosDocumento21 páginasSEMANA 2 - Ejercicio de Ordenación de RegistrosJuan JBAún no hay calificaciones
- Síntomas de Fallas de Una Caja de VelocidadesDocumento11 páginasSíntomas de Fallas de Una Caja de VelocidadesMarĭo Isaac Manrĭquéz LealAún no hay calificaciones
- Códigos OBD II Genéricos y MarcasDocumento37 páginasCódigos OBD II Genéricos y MarcasRoberto A. LópezAún no hay calificaciones
- Manual Cheetah XI (Traducción)Documento158 páginasManual Cheetah XI (Traducción)Jose Antonio Mio83% (6)