También podría gustarte
- Motores NeumaticosDocumento4 páginasMotores NeumaticoslinamartinfAún no hay calificaciones
- Motores NeumáticosDocumento5 páginasMotores NeumáticosGustavo ToralesAún no hay calificaciones
- Motores NeumaticosDocumento6 páginasMotores NeumaticosCesar Andres OspinaAún no hay calificaciones
- Motor NeumaticoDocumento20 páginasMotor NeumaticoPeedriitoO' CortesAún no hay calificaciones
- Unidad III. - Turbinas de GasDocumento37 páginasUnidad III. - Turbinas de GasPaul Soto Lopez100% (1)
- Impedancia en Serie de Las Lineas de TransmisionDocumento24 páginasImpedancia en Serie de Las Lineas de TransmisionOscar Ulises OsorioAún no hay calificaciones
- Motores IiiDocumento17 páginasMotores IiiricardoAún no hay calificaciones
- Componentes de Turbina VaporDocumento4 páginasComponentes de Turbina VaporAndres AriasAún no hay calificaciones
- Turbina de ContrapresiónDocumento2 páginasTurbina de ContrapresiónEdwin EspinoAún no hay calificaciones
- Conceptos BasicosDocumento12 páginasConceptos BasicosDark FuryAún no hay calificaciones
- Unidad 6 Turbinas HidraulicasDocumento17 páginasUnidad 6 Turbinas Hidraulicasisai anselmo alfonsin claraAún no hay calificaciones
- Maquinas de Fluidos IncompresiblesDocumento36 páginasMaquinas de Fluidos IncompresiblesLupee CruzAún no hay calificaciones
- Selección de Turbinas FrancisDocumento3 páginasSelección de Turbinas FrancisCesar Augusto Castillo RoqueAún no hay calificaciones
- COMPRESORESDocumento12 páginasCOMPRESORESAri VelardeAún no hay calificaciones
- Elementos de Trabajo NeumáticosDocumento18 páginasElementos de Trabajo NeumáticosOscar MartinezAún no hay calificaciones
- Tipos de CompresoresDocumento12 páginasTipos de CompresoresMedina TAG ChannelAún no hay calificaciones
- Turbinas de Vapor, Accion y ReaccionDocumento10 páginasTurbinas de Vapor, Accion y ReaccionCristian Calcina TurpoAún no hay calificaciones
- Sistema de Enfriamiento Otto y DieselDocumento10 páginasSistema de Enfriamiento Otto y DieselAlexis Geovanni Montes CortesAún no hay calificaciones
- Arrancadores ReversiblesDocumento31 páginasArrancadores ReversiblesLeonela SalinasAún no hay calificaciones
- Verdadero Trabajo de Residencia ProfesionalDocumento62 páginasVerdadero Trabajo de Residencia ProfesionalJared Antonio Méndez MarinAún no hay calificaciones
- Principio de Funcionamiento de Las Turbinas de VaporDocumento4 páginasPrincipio de Funcionamiento de Las Turbinas de VaporNumas LdsmAún no hay calificaciones
- Unidad 6Documento34 páginasUnidad 6aaron linkinAún no hay calificaciones
- Propulsion A ChorroDocumento10 páginasPropulsion A ChorroIrving PastelinAún no hay calificaciones
- Ventiladores Centrifugos y AxialesDocumento11 páginasVentiladores Centrifugos y AxialesOsvaldo MonroyAún no hay calificaciones
- Pinzas NeumaticasDocumento2 páginasPinzas NeumaticasJose CabalAún no hay calificaciones
- Tipos de MaquinadosDocumento10 páginasTipos de MaquinadosCarlosRodriguezLopez100% (1)
- Investigacion Uni 5 VentiladoresDocumento13 páginasInvestigacion Uni 5 VentiladoresBeny100% (1)
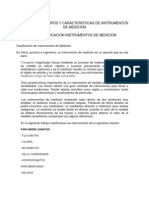
- 2 Clasificacion Tipos y Caracteristicas de Instrumentos de MedicionDocumento26 páginas2 Clasificacion Tipos y Caracteristicas de Instrumentos de MedicionRaúl Nt100% (1)
- Unidad 3 InstrumentacionDocumento14 páginasUnidad 3 InstrumentacionMichel BielmaAún no hay calificaciones
- Equipos y Maquinas Termicos 2 Unidad 2Documento23 páginasEquipos y Maquinas Termicos 2 Unidad 2Sebastian Ruiz Castro0% (1)
- Tipos de Actuadores Neumáticos Que ExistenDocumento4 páginasTipos de Actuadores Neumáticos Que ExistenCristianGordilloAún no hay calificaciones
- Sistemas de Refrigeracion Ciclo de AireDocumento3 páginasSistemas de Refrigeracion Ciclo de AireDavid BeltranAún no hay calificaciones
- Turbo 2Documento12 páginasTurbo 2Wilson MoralesAún no hay calificaciones
- 3.4 Regulación de Turbinas de VaporDocumento15 páginas3.4 Regulación de Turbinas de Vapordominguezedi51Aún no hay calificaciones
- 4.turbinas Térmicas y Su ClasificaciónDocumento8 páginas4.turbinas Térmicas y Su ClasificaciónMichael Maque0% (1)
- UNIDAD 4 Diseño ÓptimoDocumento13 páginasUNIDAD 4 Diseño Óptimosaunders26050% (2)
- Compresores AxialesDocumento58 páginasCompresores AxialessheylaaaaaAún no hay calificaciones
- Unidad 6Documento11 páginasUnidad 6ITAMI FARRERAAún no hay calificaciones
- La Turbina de VaporDocumento16 páginasLa Turbina de VaporDen StreetAún no hay calificaciones
- Turbomáquina - DefiniciónDocumento10 páginasTurbomáquina - Definiciónkarlos_jj_sanchezAún no hay calificaciones
- 372 Oleo Tema 3 Bombas y Motores HidraulicosDocumento104 páginas372 Oleo Tema 3 Bombas y Motores HidraulicosAlcides Luis Fabián BráñezAún no hay calificaciones
- Turbocompresores 2Documento29 páginasTurbocompresores 2Yordinio Cordova BellasminAún no hay calificaciones
- Equipos AuxiliaresDocumento23 páginasEquipos AuxiliaresEnrique RamirezAún no hay calificaciones
- Bomba de Alta PresionDocumento3 páginasBomba de Alta PresionHusa GomezAún no hay calificaciones
- Tarea ServomotoresDocumento10 páginasTarea ServomotoresJorge A. CamposAún no hay calificaciones
- Generador ElectricoDocumento4 páginasGenerador Electricojeg_cAún no hay calificaciones
- U-6 Turbinas de GasDocumento53 páginasU-6 Turbinas de GasAntonio NietoAún no hay calificaciones
- Maquinas de Fluidos Incompresibles, Definición y ClasificaciónDocumento13 páginasMaquinas de Fluidos Incompresibles, Definición y ClasificaciónJorge Luis Chavez CernaAún no hay calificaciones
- 02 Diapositiva de Máquinas de Calor, El Ciclo de Otto, Ciclo Diesel. Ciclo de Carnot. RefrigeradoresDocumento11 páginas02 Diapositiva de Máquinas de Calor, El Ciclo de Otto, Ciclo Diesel. Ciclo de Carnot. RefrigeradoresEnrique_Antonio_80Aún no hay calificaciones
- Unidad 2 Instalaciones ElectricasDocumento35 páginasUnidad 2 Instalaciones ElectricasWereja Ramirez100% (1)
- Ventajas y Desventajas de Los CompresoresDocumento3 páginasVentajas y Desventajas de Los CompresoresWilCalamaniAún no hay calificaciones
- 4.4 Analisis de Fuerzas en Los Alabes de Un Rotor PPT 1Documento11 páginas4.4 Analisis de Fuerzas en Los Alabes de Un Rotor PPT 1Tadeo HernandezAún no hay calificaciones
- TurbomaquinasDocumento25 páginasTurbomaquinasOscarAún no hay calificaciones
- Mantenimiento en Turbinas A VaporDocumento54 páginasMantenimiento en Turbinas A VaporPaola Celeste Giancarli SalazarAún no hay calificaciones
- Transmisiones HidráulicasDocumento28 páginasTransmisiones Hidráulicasmarcos calixtoAún no hay calificaciones
- Averías en Turbinas de VaporDocumento8 páginasAverías en Turbinas de VaporLisette EspidioAún no hay calificaciones
- Equipos Auxiliares VálvulasDocumento13 páginasEquipos Auxiliares VálvulasalfredoAún no hay calificaciones
- Motores NeumáticosDocumento21 páginasMotores NeumáticosDAVID DE JESUS DIAZ GARCIAAún no hay calificaciones
- Catgenmotoresneumac PDFDocumento22 páginasCatgenmotoresneumac PDFReyes VargasAún no hay calificaciones
- Motores NeumáticosDocumento26 páginasMotores NeumáticosGaibor Jaime SteevenAún no hay calificaciones
- Proyecto EjeesDocumento6 páginasProyecto EjeesNeify Llado EsquivelAún no hay calificaciones
- Especificación Técnica Puente Grúa 15 TN Rectificadoras Skin PassDocumento23 páginasEspecificación Técnica Puente Grúa 15 TN Rectificadoras Skin PassDidier CardenasAún no hay calificaciones
- Reductor de VelocidadDocumento18 páginasReductor de VelocidadNicolas Adolfo Quijon MendozaAún no hay calificaciones
- Analisis de Falla - 07 - CigueñalDocumento32 páginasAnalisis de Falla - 07 - CigueñalAvelino Santiago88% (17)
- Ape-Vibro-200-595-20191118 SPDocumento86 páginasApe-Vibro-200-595-20191118 SPYosefh ArizmendiAún no hay calificaciones
- Caja de Cambios 2018 Mod UltimateDocumento52 páginasCaja de Cambios 2018 Mod UltimateTeddy Hilarión Sierra Gonzales100% (1)
- Dmi Semana12 TelloDocumento8 páginasDmi Semana12 TelloDarwin TCAún no hay calificaciones
- TR1 MantenimientoDocumento10 páginasTR1 MantenimientoCARLOS FFAún no hay calificaciones
- POLEASDocumento23 páginasPOLEASJuan Pablo Garcia LanderoAún no hay calificaciones
- Cuerda Wildhaber Javier Antezana 2Documento4 páginasCuerda Wildhaber Javier Antezana 2ronyeAún no hay calificaciones
- Aceros Construccion MecanicaDocumento12 páginasAceros Construccion MecanicaFabio BarceloAún no hay calificaciones
- Investigación de La AtmósferaDocumento52 páginasInvestigación de La AtmósferaEduardo ValbuenaAún no hay calificaciones
- Planos Araña PDFDocumento17 páginasPlanos Araña PDFJuanDiegoReyesSanchezAún no hay calificaciones
- Fundamentos en Estática y Dinamica Plan AnaliticoDocumento4 páginasFundamentos en Estática y Dinamica Plan AnaliticoingoscarportillahAún no hay calificaciones
- Mantenimiento BasicoDocumento58 páginasMantenimiento BasicoRonald Mosquera100% (2)
- Fabricacion EngranajesDocumento8 páginasFabricacion EngranajesFelipe Trujillo50% (2)
- Producto Académico #1 GIMDocumento13 páginasProducto Académico #1 GIMLuis Antonio Bravo SaucedoAún no hay calificaciones
- Presentación 1 MPMDocumento106 páginasPresentación 1 MPMDiego John Gavilanes UvidiaAún no hay calificaciones
- APUNTE DE ACOPLAM - OficioDocumento12 páginasAPUNTE DE ACOPLAM - OficioEnzo VeronAún no hay calificaciones
- Catalogo Tecnico Alumet ElectrogasDocumento8 páginasCatalogo Tecnico Alumet ElectrogasErnesto HoffmannAún no hay calificaciones
- Catalogo Polipasto EspDocumento24 páginasCatalogo Polipasto EspPablo Piña MuñozAún no hay calificaciones
- DFPB EsDocumento24 páginasDFPB EsdannysionAún no hay calificaciones
- Taller de Carnes..Documento17 páginasTaller de Carnes..Christian CulebroAún no hay calificaciones
- Informe de Taller N°1Documento16 páginasInforme de Taller N°1robertomartinezquiroz100% (1)
- ZX17U-5 ZX26U-5 ZX30U-5 LA Digital Only 17-05Documento20 páginasZX17U-5 ZX26U-5 ZX30U-5 LA Digital Only 17-05Enrique Nieto ParraAún no hay calificaciones
- Daily F1CDocumento75 páginasDaily F1CAnderson Bombista100% (2)
- GT5taller Plans 55555Documento9 páginasGT5taller Plans 55555mjhjhjhuhuAún no hay calificaciones
- Maquina Que SigueDocumento36 páginasMaquina Que SigueMarco AlbrichetAún no hay calificaciones
- Robot Controlado Por Bluetoo Con Programación de ArduinoDocumento9 páginasRobot Controlado Por Bluetoo Con Programación de ArduinoRomi Arenas BustinzaAún no hay calificaciones
- Guia de Aprendizaje Sena Sistema de ArranqueDocumento6 páginasGuia de Aprendizaje Sena Sistema de ArranqueMarvin BayonaAún no hay calificaciones