También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Seminario de PLC BasDocumento97 páginasSeminario de PLC BasjaimeasisaAún no hay calificaciones
- Una Señal PWMDocumento5 páginasUna Señal PWMonepiece24Aún no hay calificaciones
- Práctica 9 Microprocesadores II PWMDocumento6 páginasPráctica 9 Microprocesadores II PWMBoris ZuñigaAún no hay calificaciones
- Práctica 9 Microprocesadores Ii PWMDocumento4 páginasPráctica 9 Microprocesadores Ii PWMArturo72Aún no hay calificaciones
- Proyecto Con Microcontrolador Pic16f628a1Documento13 páginasProyecto Con Microcontrolador Pic16f628a1Omar Ramirez HerreraAún no hay calificaciones
- Módulo CCP y Módulo EEPROMDocumento19 páginasMódulo CCP y Módulo EEPROMGabriel Llerena QuenayaAún no hay calificaciones
- Practica 8 - Modulación Por Ancho de PulsoDocumento10 páginasPractica 8 - Modulación Por Ancho de PulsoAlejandra OlveraAún no hay calificaciones
- PWM DiapositivasDocumento19 páginasPWM DiapositivasJesus Alfredo100% (1)
- 10 - Módulo CCPDocumento48 páginas10 - Módulo CCPKevin René Alarcón CalderónAún no hay calificaciones
- R5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozDocumento9 páginasR5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozRODRIGO LOPEZ GUTIERREZAún no hay calificaciones
- Control PWM de Un Motor DC Con Microcontroladores PICDocumento5 páginasControl PWM de Un Motor DC Con Microcontroladores PICJehison EscobarAún no hay calificaciones
- Tutoriales PIC - Modulación PWM (Pulse Width Modulation)Documento14 páginasTutoriales PIC - Modulación PWM (Pulse Width Modulation)Gabriel RamirezAún no hay calificaciones
- Modulo CCP MicrocontroladoresDocumento10 páginasModulo CCP MicrocontroladoresDavid BermudezAún no hay calificaciones
- Modulo CCP MicroDocumento23 páginasModulo CCP MicroAlberto Hinojosa100% (1)
- Ilovepdf MergedDocumento57 páginasIlovepdf MergedAlan Varela GarcíaAún no hay calificaciones
- Tutoriales PIC - Modulación PWM (Pulse Width Modulation)Documento17 páginasTutoriales PIC - Modulación PWM (Pulse Width Modulation)ylmalaverAún no hay calificaciones
- Pic16f877 3Documento39 páginasPic16f877 3topotopoAún no hay calificaciones
- Laboratorio 03 Micro - PWMDocumento14 páginasLaboratorio 03 Micro - PWMSilence EngelAún no hay calificaciones
- Pic18f2550 - PWMDocumento5 páginasPic18f2550 - PWMJHON ERIC RODRIGUEZ CABEZASAún no hay calificaciones
- Pic Modo CapturaDocumento4 páginasPic Modo CapturaJulian David RodriguezAún no hay calificaciones
- Choper de FrenadoDocumento32 páginasChoper de FrenadoRomulo TorresAún no hay calificaciones
- Tema 6 - MicrocontroladoresDocumento27 páginasTema 6 - MicrocontroladoresJULIO CESAR PAMPA MAMANIAún no hay calificaciones
- Proyecto Control de Motor DCDocumento7 páginasProyecto Control de Motor DCPedro Ar MolinaAún no hay calificaciones
- Modulo CCPDocumento6 páginasModulo CCPPablo K-noAún no hay calificaciones
- MPLABX C18 Control de PWMDocumento17 páginasMPLABX C18 Control de PWMkhriz_69Aún no hay calificaciones
- Investigación Sobre Modulo CCP (Capture, Compare, PWM)Documento10 páginasInvestigación Sobre Modulo CCP (Capture, Compare, PWM)JP Cylia Toapanta100% (2)
- Modulos PWM para Control de MotoresDocumento8 páginasModulos PWM para Control de MotoresWesther Eduardo AAún no hay calificaciones
- Modulación PWMDocumento37 páginasModulación PWMradaresAún no hay calificaciones
- MicrochipDocumento6 páginasMicrochipDany Omar ValenciaAún no hay calificaciones
- Modulo CCP (PWM)Documento21 páginasModulo CCP (PWM)Edson AguirreAún no hay calificaciones
- Practica Primer ParcialDocumento4 páginasPractica Primer ParcialMauricio Calderon FrontanillaAún no hay calificaciones
- Informe Practica 4 PDFDocumento9 páginasInforme Practica 4 PDFFranco Pérez MuñozAún no hay calificaciones
- Laboratorio de Microcontroladores Laboratorio N°14 "PWM"Documento11 páginasLaboratorio de Microcontroladores Laboratorio N°14 "PWM"Willy Arnold Valencia CamayoAún no hay calificaciones
- Generar Onda Cuadrada Con Microprocesador 8052Documento33 páginasGenerar Onda Cuadrada Con Microprocesador 8052Samuel Gómez100% (1)
- MÓDULO CCP (CapturaDocumento27 páginasMÓDULO CCP (CapturaVeruska San Miguel0% (1)
- Control de Velocidad PWM para Motores de Corriente DirectaDocumento6 páginasControl de Velocidad PWM para Motores de Corriente DirectaeeindustrialAún no hay calificaciones
- Tacometro DigitalDocumento9 páginasTacometro DigitalFroylan Espinoza0% (1)
- Temporizadores, CCP, Timers, Pwm-ProtonDocumento24 páginasTemporizadores, CCP, Timers, Pwm-ProtonAnonymous EqjLp8LkjaAún no hay calificaciones
- PWM en Msp430g2553Documento5 páginasPWM en Msp430g2553Carlos LMAún no hay calificaciones
- PIC16F873 v1Documento22 páginasPIC16F873 v1Mary RodríguezAún no hay calificaciones
- Modulo CCPDocumento20 páginasModulo CCPjesusdruizvAún no hay calificaciones
- Inf Pwm-AdcDocumento21 páginasInf Pwm-AdcDaniel PantojaAún no hay calificaciones
- Control Automático Del Nivel de Luz.Documento10 páginasControl Automático Del Nivel de Luz.Anthony C. Ortiz ArellanoAún no hay calificaciones
- Lab#7 - PWMDocumento11 páginasLab#7 - PWMDenzel Vega NoeAún no hay calificaciones
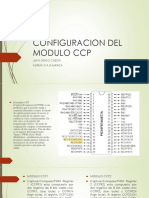
- Configuracion Del Modulo CCPDocumento16 páginasConfiguracion Del Modulo CCPJuan Diego CuestaAún no hay calificaciones
- Proyecto de InstrumentacionDocumento15 páginasProyecto de InstrumentacionRoberto AulestiaAún no hay calificaciones
- Arquitectura 16f887Documento9 páginasArquitectura 16f887Andres SalazarAún no hay calificaciones
- Timers CCP Pic 18f877aDocumento28 páginasTimers CCP Pic 18f877aanon_376202896100% (1)
- 4-005-Secuencial de 8 Canales Program AbleDocumento12 páginas4-005-Secuencial de 8 Canales Program AbleIsaac SilvaAún no hay calificaciones
- Dia 01Documento16 páginasDia 01sikuripAún no hay calificaciones
- Introducción Al PWMDocumento4 páginasIntroducción Al PWMZam HernandezAún no hay calificaciones
- Tema 6 - MicrocontroladoresDocumento20 páginasTema 6 - MicrocontroladoresJulio Cesar Pampa MamaniAún no hay calificaciones
- Microcontrolador PIC16F84Documento7 páginasMicrocontrolador PIC16F84Ezequiel VelasquezAún no hay calificaciones
- Proyectos Con Microcontroladores PICDocumento20 páginasProyectos Con Microcontroladores PICsinchyAún no hay calificaciones
- Microcontroladores II en C. Tema 3Documento32 páginasMicrocontroladores II en C. Tema 3Eduardo CastañedaAún no hay calificaciones
- 2 Descripción Detallada PWM Del PIC18F4550Documento4 páginas2 Descripción Detallada PWM Del PIC18F4550Brayan Alberto Segovia100% (1)
- Planificador Semanal Aprendo en Casa - Lar-S9 - 01-06Documento3 páginasPlanificador Semanal Aprendo en Casa - Lar-S9 - 01-06MARTHA RUTH SILVA CANOAún no hay calificaciones
- Manual Del Instalador-Cama SimpleDocumento6 páginasManual Del Instalador-Cama SimpleMGS ArgentumAún no hay calificaciones
- LB1 CW06 x1 Data Sheet esES 15120697355Documento4 páginasLB1 CW06 x1 Data Sheet esES 15120697355alberto_canales-1Aún no hay calificaciones
- Contaminación de Los Suelos y El AireDocumento14 páginasContaminación de Los Suelos y El AireVirginia SbardellaAún no hay calificaciones
- Is 03Documento1 páginaIs 03Dickson GonzalesAún no hay calificaciones
- Guia Del Op. de Sistemas TG Taurus70sDocumento241 páginasGuia Del Op. de Sistemas TG Taurus70sCarlos Antonio Aguilar AcostaAún no hay calificaciones
- Fichas KDE6700T-LVNDocumento2 páginasFichas KDE6700T-LVNLuis CarpioAún no hay calificaciones
- 01S EXP2 5° - Los PeriféricosDocumento4 páginas01S EXP2 5° - Los PeriféricosLUIS GERMAN ESPINOZA ZAPATAAún no hay calificaciones
- Extracto Sobre Sociopolis de ArquitectosDocumento4 páginasExtracto Sobre Sociopolis de ArquitectosJavierTellecheaAún no hay calificaciones
- Objetivos de Desarrollo Sostenible PDFDocumento8 páginasObjetivos de Desarrollo Sostenible PDFEDER MORALESAún no hay calificaciones
- Taller 2 Informática 1Documento18 páginasTaller 2 Informática 1Emmanuel Javier Perez MarinAún no hay calificaciones
- E CommerceDocumento15 páginasE CommerceEdison VegaAún no hay calificaciones
- EvidencianVideonFabricarnunnmotornsencillonv2 645ef4fd1557f4a PDFDocumento3 páginasEvidencianVideonFabricarnunnmotornsencillonv2 645ef4fd1557f4a PDFNicolas LopezAún no hay calificaciones
- Cuestionario 2 Correspondiente A La Presentación 2Documento4 páginasCuestionario 2 Correspondiente A La Presentación 2Dayanna Ivette Espinal MejiaAún no hay calificaciones
- Cuadro AcdDocumento3 páginasCuadro AcdKidalim Gonzalez RosalesAún no hay calificaciones
- Selección-Fuentes Reclutamiento (FORO)Documento6 páginasSelección-Fuentes Reclutamiento (FORO)Maye RamirezAún no hay calificaciones
- La Globalizacion, La Mundializacion y Su Impacto en La Economia de La EducacionDocumento17 páginasLa Globalizacion, La Mundializacion y Su Impacto en La Economia de La EducacionmarinAún no hay calificaciones
- Lab Cir Digitales 08Documento7 páginasLab Cir Digitales 08Joel Cad PadAún no hay calificaciones
- Caracteristica de La Familia 11Documento7 páginasCaracteristica de La Familia 11Jairo CobeñaAún no hay calificaciones
- APRENDE EN CASA PLAN SEMANAL Secundaria Semana 7Documento15 páginasAPRENDE EN CASA PLAN SEMANAL Secundaria Semana 7Laura IslasAún no hay calificaciones
- Ley de Kirchoff y PotenciaDocumento7 páginasLey de Kirchoff y PotenciaIgnacio Javier Gonzalez FloresAún no hay calificaciones
- Programa CIV270 ACUEDUCTOS Y ALCANTARILLADOSDocumento4 páginasPrograma CIV270 ACUEDUCTOS Y ALCANTARILLADOSLeonardo Miguel Doñe CalderonAún no hay calificaciones
- Historia Del AutocadDocumento3 páginasHistoria Del AutocadMiguel RosadoAún no hay calificaciones
- 1 Guia Informe Tecnico para Residencias ItccDocumento24 páginas1 Guia Informe Tecnico para Residencias ItccAlejandra NevarezAún no hay calificaciones
- Diapositiva Roland EstelaDocumento27 páginasDiapositiva Roland EstelaNoel LinoAún no hay calificaciones
- 13 - Capitulo XIIDocumento24 páginas13 - Capitulo XIIMARCOS MEXAún no hay calificaciones
- Sílabo - Costos y Presupuestos 2020-IDocumento5 páginasSílabo - Costos y Presupuestos 2020-ID'kEiFaQqAún no hay calificaciones
- Gerencia de ProyectosiDocumento15 páginasGerencia de ProyectosigusAún no hay calificaciones
- Certificado Agroindustrias 30dic20 AprobarDocumento46 páginasCertificado Agroindustrias 30dic20 AprobarCarlin SimbañaAún no hay calificaciones
- Informatica Grupo 1Documento44 páginasInformatica Grupo 1Paholita GonzálezAún no hay calificaciones