También podría gustarte
- Datos Empiricos Vs TeoricosDocumento1 páginaDatos Empiricos Vs TeoricosPablo Joscar Sanchez GotopoAún no hay calificaciones
- Rezago Tecnologico en MexicoDocumento3 páginasRezago Tecnologico en MexicoEstefania Itandehui MillánAún no hay calificaciones
- Finalidad de La TGSDocumento7 páginasFinalidad de La TGSAndres Junior GonzalezAún no hay calificaciones
- 111Documento18 páginas111Fernan MartinezAún no hay calificaciones
- Conceptos Índices EmpíricosDocumento2 páginasConceptos Índices EmpíricosPablo Andreé Cisneros100% (1)
- Aplicacion de Enfoque SistematicoDocumento10 páginasAplicacion de Enfoque SistematicoAndres Junior Gonzalez100% (1)
- El Entramado Estructura SocialDocumento19 páginasEl Entramado Estructura SocialAlicia GordilloAún no hay calificaciones
- Función Directiva y de MandoDocumento2 páginasFunción Directiva y de MandoJocelyn OHAún no hay calificaciones
- Fernández - Pereda Explicar Intervenir Sobre La Desafiliación Educativa en La Enseñanza MediaDocumento11 páginasFernández - Pereda Explicar Intervenir Sobre La Desafiliación Educativa en La Enseñanza MediaMartin AlcaideAún no hay calificaciones
- Determinación Del Instrumento de Recolección de DatosDocumento24 páginasDeterminación Del Instrumento de Recolección de DatosCyberHeidernAún no hay calificaciones
- Contaminantes Quimicos y BiologicosDocumento24 páginasContaminantes Quimicos y Biologicosjose alfredo peña castellanosAún no hay calificaciones
- Tesis. Bacterias Remocion HidrocarburosDocumento99 páginasTesis. Bacterias Remocion HidrocarburosAnonymous o4FhNVhAún no hay calificaciones
- Teoria General de Sistemas en La AdministracionDocumento5 páginasTeoria General de Sistemas en La AdministracionAndrea MuñozAún no hay calificaciones
- Cibernetica y Teoria General de SistemasDocumento23 páginasCibernetica y Teoria General de SistemasVicky Niño100% (1)
- Métodos de OrdenamientoDocumento8 páginasMétodos de OrdenamientoAlejandro Roman MisasAún no hay calificaciones
- ANTROPOMETRIADocumento24 páginasANTROPOMETRIAJohan Candela SanchezAún no hay calificaciones
- Pensamiento SistemicoDocumento3 páginasPensamiento SistemicostephanyAún no hay calificaciones
- Investigación Proceso de La Adquisicion Del ConocimientoDocumento8 páginasInvestigación Proceso de La Adquisicion Del ConocimientoEmmanuel MartínezAún no hay calificaciones
- LINEA DEL TIEMPO TEORÍA GENERAL DE SISTEMAS Timeline - TimetoastDocumento4 páginasLINEA DEL TIEMPO TEORÍA GENERAL DE SISTEMAS Timeline - TimetoastJefferson Ricaurte JaimesAún no hay calificaciones
- 1.1 Introducción A La Ingeniería Industrial y Conceptos GeneralesDocumento18 páginas1.1 Introducción A La Ingeniería Industrial y Conceptos GeneralesJorge Lopez DominguezAún no hay calificaciones
- DEBER - 1 - Etapas Del Diseño ExperimentalDocumento8 páginasDEBER - 1 - Etapas Del Diseño Experimentaljc4d2gAún no hay calificaciones
- Metodo EstadisticoDocumento1 páginaMetodo EstadisticoMichael G TubayAún no hay calificaciones
- Investigacion Pura y Aplicada, Cualitativa y CuantitativaDocumento10 páginasInvestigacion Pura y Aplicada, Cualitativa y CuantitativaClaudia HernandezAún no hay calificaciones
- Pensamiento SistemáticoDocumento15 páginasPensamiento SistemáticoAle TakanaAún no hay calificaciones
- Universo EstadisticoDocumento4 páginasUniverso EstadisticoSandro Sebastian100% (1)
- Anteproyecto Higiene y SeguridadDocumento47 páginasAnteproyecto Higiene y SeguridadLeyda Maria Ruiz CarrilloAún no hay calificaciones
- Teoria General de SistemasDocumento3 páginasTeoria General de SistemasLuis Angel Orduño CabreraAún no hay calificaciones
- Propiedades de Los SistemasDocumento8 páginasPropiedades de Los SistemasJose SosaAún no hay calificaciones
- Semana 1 Introducción A La Teoría General de SistemasDocumento22 páginasSemana 1 Introducción A La Teoría General de SistemasLuis Rayme BazalarAún no hay calificaciones
- Toma de DecisionesDocumento36 páginasToma de DecisionesGénesis Acosta71% (7)
- Taxonomía de Ciencias y SistemasDocumento7 páginasTaxonomía de Ciencias y SistemasMike MLAún no hay calificaciones
- Trabajo Teoría General de SistemasDocumento14 páginasTrabajo Teoría General de SistemasManuelQuezadaAún no hay calificaciones
- El Comportamiento AdministrativoDocumento2 páginasEl Comportamiento Administrativopaqquittoo40% (5)
- Ruta Critica Proyectos de Intervencion ComunitariaDocumento4 páginasRuta Critica Proyectos de Intervencion ComunitariasandyAún no hay calificaciones
- REFORMULACIONDocumento3 páginasREFORMULACIONgonzalocerocincoAún no hay calificaciones
- La Gestion de RH Por Competencias Cap 2Documento30 páginasLa Gestion de RH Por Competencias Cap 2Adriana Blanco100% (1)
- El Pensamiento SistematicoDocumento16 páginasEl Pensamiento SistematicoOrangelAún no hay calificaciones
- Ley de Gay-Lussac - Wikipedia, La Enciclopedia LibreDocumento2 páginasLey de Gay-Lussac - Wikipedia, La Enciclopedia LibreNANINDJAún no hay calificaciones
- Tipos de SistemasDocumento8 páginasTipos de SistemasJolhfrexito Mas Naa100% (1)
- Procedimiento de Muestreo Por VariablesDocumento4 páginasProcedimiento de Muestreo Por VariablesCzarina Borbon AmayaAún no hay calificaciones
- Ingenieria en Sistemas 3.1Documento5 páginasIngenieria en Sistemas 3.1Arath SobrevillaAún no hay calificaciones
- Teoria General de SistemaDocumento17 páginasTeoria General de SistemaFannii FanniieAún no hay calificaciones
- Tolerancias DiferenciasDocumento5 páginasTolerancias DiferenciasJorge Bacuilima MoraAún no hay calificaciones
- Investigacion Diagnostica, Descriptiva y ExplicativaDocumento20 páginasInvestigacion Diagnostica, Descriptiva y Explicativaceilia altamirano100% (1)
- U5 Escenario ModificadoDocumento37 páginasU5 Escenario ModificadoJose Carlos Valdovinos RomeroAún no hay calificaciones
- Concepto de Hetarquia MccullochDocumento24 páginasConcepto de Hetarquia MccullochJaime Ruiz SolórzanoAún no hay calificaciones
- Teoría Del CaosDocumento2 páginasTeoría Del CaosJessica AcostaAún no hay calificaciones
- 1.1 Conceptos e Importancia de La CalidadDocumento8 páginas1.1 Conceptos e Importancia de La CalidadBecerra León Juan100% (1)
- Ética AmbientalDocumento15 páginasÉtica AmbientalMayra A Rivera SAún no hay calificaciones
- La Teoría General de SistemasDocumento18 páginasLa Teoría General de SistemasJazmin ZamudioAún no hay calificaciones
- KauffmanDocumento17 páginasKauffmannx9006100% (1)
- TEMA - 6 Razonamiento ProbabilisticoDocumento9 páginasTEMA - 6 Razonamiento Probabilisticoagis2626Aún no hay calificaciones
- Química AnalíticaDocumento2 páginasQuímica AnalíticaYobana RomeroAún no hay calificaciones
- Resumen de La Teoría General de Sistemas y Conceptos y Principios Básicos TGSDocumento4 páginasResumen de La Teoría General de Sistemas y Conceptos y Principios Básicos TGSRodrigo ChávezAún no hay calificaciones
- Automedicacion Del Profesional de Enfermeria Hospital General Del Sur.Documento74 páginasAutomedicacion Del Profesional de Enfermeria Hospital General Del Sur.Aura Acosta100% (1)
- Clasificación y Selección de Los Diseños ExperimentalesDocumento32 páginasClasificación y Selección de Los Diseños ExperimentalesEsperanza35Aún no hay calificaciones
- Escalas Valoracion DolorDocumento1 páginaEscalas Valoracion DolorUlises Gonzalez100% (1)
- Problemas de Optimización Con PythonDocumento14 páginasProblemas de Optimización Con PythonElena Villca AguilarAún no hay calificaciones
- Variables de Decisión y ParámetrosDocumento2 páginasVariables de Decisión y ParámetrosJosue Mamani AquinoAún no hay calificaciones
- INVESTIGACIONESDocumento26 páginasINVESTIGACIONESMariela MatamorosAún no hay calificaciones
- 02 Anexos Pladiga 2022 CastDocumento168 páginas02 Anexos Pladiga 2022 CastLibros RaniAún no hay calificaciones
- TDR Flete Terrestre-CarhuazDocumento9 páginasTDR Flete Terrestre-CarhuazJuan ColoniaAún no hay calificaciones
- TDR ABRAZADERADocumento3 páginasTDR ABRAZADERADaynie QVAún no hay calificaciones
- Manual Reconectador 2 PDFDocumento240 páginasManual Reconectador 2 PDFANDRES CISTERNASAún no hay calificaciones
- ORACION San Marcos de LeonDocumento4 páginasORACION San Marcos de LeonMariana Caicedo83% (6)
- Abandono Del BuqueDocumento22 páginasAbandono Del Buquegeorge javierAún no hay calificaciones
- Importancia Del Esfuerzo de TracciónDocumento24 páginasImportancia Del Esfuerzo de TracciónRojas Rios Alondra CarolinaAún no hay calificaciones
- EE60 - Examen Parcial 15 - 2020-IIDocumento2 páginasEE60 - Examen Parcial 15 - 2020-IIAntonio de la CruzAún no hay calificaciones
- Cat Tub ConduitDocumento1 páginaCat Tub Conduitantonio moralesAún no hay calificaciones
- Marco TeoricoDocumento3 páginasMarco TeoricoMarce Herrera BeltranAún no hay calificaciones
- Danmachi The Blind Swordsman Chapter 33 - ChapteDocumento15 páginasDanmachi The Blind Swordsman Chapter 33 - ChapteEder Mael Roque GarciaAún no hay calificaciones
- Acc 19Documento6 páginasAcc 19leoAún no hay calificaciones
- Examen InglessDocumento1 páginaExamen InglessBetsabe MalpicaAún no hay calificaciones
- 04 EvapotranspiraciónDocumento33 páginas04 EvapotranspiraciónAlexander Ares Melendrez LazoAún no hay calificaciones
- Curso de Fundición BásicaDocumento3 páginasCurso de Fundición BásicaGustavo Díaz come pingaAún no hay calificaciones
- Igualdades Diferencias Ventajas y Desventajas Entre Los Modelos OSI y TCPIPDocumento25 páginasIgualdades Diferencias Ventajas y Desventajas Entre Los Modelos OSI y TCPIPGerson Camacho C0% (1)
- Nanotecnología en El Concreto y CementoDocumento13 páginasNanotecnología en El Concreto y CementoBKAVE TOWRSAún no hay calificaciones
- Ficha Seguridad Clinker Nov. 2010Documento14 páginasFicha Seguridad Clinker Nov. 2010JuanPabloBernaschinaAún no hay calificaciones
- Cuadro Comparativo Redes de TransporteDocumento11 páginasCuadro Comparativo Redes de Transportecesar augusto muñoz ortizAún no hay calificaciones
- Convertidor Buck MontajeDocumento11 páginasConvertidor Buck MontajeDiego BautistaAún no hay calificaciones
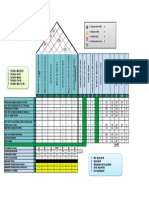
- Casa de La Calidad QDF MicehllDocumento1 páginaCasa de La Calidad QDF Micehllfer ChirinosAún no hay calificaciones
- Psicopatía InfantilDocumento8 páginasPsicopatía InfantilWendy JazmínAún no hay calificaciones
- El Capital de Trabajo de Las Empresas de La Industria PDFDocumento12 páginasEl Capital de Trabajo de Las Empresas de La Industria PDFISSECJ 2019 2018-2019Aún no hay calificaciones
- Perforación y Voladura en Vetas Angostas en ArirahuaDocumento11 páginasPerforación y Voladura en Vetas Angostas en Arirahuaagvega69109Aún no hay calificaciones
- Hiperónimos, Hipónimos y CohipónimosDocumento22 páginasHiperónimos, Hipónimos y CohipónimosHEIDY KAROLINA HERNANDEZ ENAMORADOAún no hay calificaciones
- Examen Tema 3. LenguaDocumento3 páginasExamen Tema 3. LenguaJOSE MANUEL ROSILLO100% (2)
- Peritaje ZootecnicoDocumento7 páginasPeritaje ZootecnicoLuis Ignacio Herrera HernandezAún no hay calificaciones
- S Valor de Ajuste, C Valor de Comprobación) OT Tolerancia Exterior (Se Ajusta X)Documento8 páginasS Valor de Ajuste, C Valor de Comprobación) OT Tolerancia Exterior (Se Ajusta X)Karen FalconesAún no hay calificaciones
- ECOLOGIADocumento3 páginasECOLOGIAMarcela BertoliniAún no hay calificaciones
- Catalogo Steel Complements 2019Documento40 páginasCatalogo Steel Complements 2019shaggy0078100% (1)