También podría gustarte
- INFORME TÉCNICO DE EVALUACIÓN DEL SISTEMA DE REFRIGERACIÓN POR AGUA EN C1 - CONDICIÓN ACTUAL Y CONDICIÓN FUTURA Rev C (Revis)Documento18 páginasINFORME TÉCNICO DE EVALUACIÓN DEL SISTEMA DE REFRIGERACIÓN POR AGUA EN C1 - CONDICIÓN ACTUAL Y CONDICIÓN FUTURA Rev C (Revis)Ezequiel PezoAún no hay calificaciones
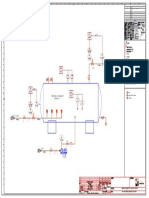
- PRI20313MPL007h07 0Documento1 páginaPRI20313MPL007h07 0Ezequiel PezoAún no hay calificaciones
- Planos de Caldera de 50BHPDocumento9 páginasPlanos de Caldera de 50BHPEzequiel PezoAún no hay calificaciones
- Ito MC 26005 4 30 4007 - CDocumento13 páginasIto MC 26005 4 30 4007 - CEzequiel PezoAún no hay calificaciones
- Memoria de Calculo de Caida de Presion de Intercambiador de Calor 4P-2C-40Documento15 páginasMemoria de Calculo de Caida de Presion de Intercambiador de Calor 4P-2C-40Ezequiel PezoAún no hay calificaciones
- Filosofia Control - Caldeo Piro 900 BHPDocumento4 páginasFilosofia Control - Caldeo Piro 900 BHPEzequiel PezoAún no hay calificaciones
- 7mo Prueba Formula Explicaciones Hist243ricas 21 224510258Documento6 páginas7mo Prueba Formula Explicaciones Hist243ricas 21 224510258Ezequiel PezoAún no hay calificaciones
- PRI20313MPL007h06 0Documento1 páginaPRI20313MPL007h06 0Ezequiel PezoAún no hay calificaciones
- Procedimiento de Calculo de Perdidas de Calor y Calculo de Retorno de InversionDocumento13 páginasProcedimiento de Calculo de Perdidas de Calor y Calculo de Retorno de InversionEzequiel PezoAún no hay calificaciones
- Filosofía de Control - VotorantimDocumento26 páginasFilosofía de Control - VotorantimEzequiel PezoAún no hay calificaciones
- Control PredictivoDocumento19 páginasControl PredictivoEzequiel PezoAún no hay calificaciones
- Lista de Precios Siemens DFPD 2018Documento173 páginasLista de Precios Siemens DFPD 2018Ezequiel Pezo80% (5)
- GNP Gym Tub MC 0103 V001 - RaDocumento34 páginasGNP Gym Tub MC 0103 V001 - RaEzequiel PezoAún no hay calificaciones
- Skid de Regulacion de Gas Natural - PiuraDocumento217 páginasSkid de Regulacion de Gas Natural - PiuraEzequiel PezoAún no hay calificaciones
- Acumulador de Vapor de 3000kg - HDocumento1 páginaAcumulador de Vapor de 3000kg - HEzequiel PezoAún no hay calificaciones
- PLANO P&ID DE AGITADOR Model PDFDocumento1 páginaPLANO P&ID DE AGITADOR Model PDFEzequiel PezoAún no hay calificaciones
- Adaptativo FuzzyDocumento121 páginasAdaptativo FuzzyEzequiel PezoAún no hay calificaciones
- Reacondicionamiento de PozosDocumento18 páginasReacondicionamiento de PozosRamon antonio Arteaga brachoAún no hay calificaciones
- Propaganda ElectoralDocumento83 páginasPropaganda ElectoralRogelio LopezAún no hay calificaciones
- Un Puente Entre Dos VidasDocumento24 páginasUn Puente Entre Dos VidasInes CatalinaAún no hay calificaciones
- Cadena Productiva Del MangoDocumento27 páginasCadena Productiva Del MangoYirley MarínAún no hay calificaciones
- Trichuriasis y Sus Complicaciones Clínicas.Documento24 páginasTrichuriasis y Sus Complicaciones Clínicas.Lorena ZepedaAún no hay calificaciones
- Procedimientos Operativos Normalizados - PONSDocumento18 páginasProcedimientos Operativos Normalizados - PONSHéctor F. Martínez D.Aún no hay calificaciones
- Semana 5 Presencial Costo de Producción5088Documento11 páginasSemana 5 Presencial Costo de Producción5088Karen Mariana Luyo CastroAún no hay calificaciones
- FORMULARIO REGISTRO ÚNICO Camara de Comercio Ya Lleno PDFDocumento6 páginasFORMULARIO REGISTRO ÚNICO Camara de Comercio Ya Lleno PDFJorge Andres Afanador Porras100% (1)
- Sergio MendezDocumento4 páginasSergio MendezFredi CastilloAún no hay calificaciones
- Psicologia 2Documento4 páginasPsicologia 2Fernanda SanguinoAún no hay calificaciones
- 03 - La Fantasía de Papá - Nicolás Hyde.Documento122 páginas03 - La Fantasía de Papá - Nicolás Hyde.Zayra AlvarezAún no hay calificaciones
- Fonema DDocumento35 páginasFonema DSamy SanAún no hay calificaciones
- ReGresion MultipleDocumento36 páginasReGresion MultipleMarco BenitesAún no hay calificaciones
- Contabilidad Electrónica Paso A Paso Con Aspel-COI 7.0Documento7 páginasContabilidad Electrónica Paso A Paso Con Aspel-COI 7.0Guadalupe Perea CoronaAún no hay calificaciones
- Catalogo GalvasidDocumento32 páginasCatalogo GalvasidOscar AlonsoAún no hay calificaciones
- Lección No 03.Documento11 páginasLección No 03.Wilian Contreras WilchesAún no hay calificaciones
- Plan de Trabajo FaoDocumento6 páginasPlan de Trabajo Faoהמאיר בך אברהםAún no hay calificaciones
- Prueba La Luz 3 BasicoDocumento4 páginasPrueba La Luz 3 BasicoJohanna Alejandra Vallejos Salas100% (1)
- 3º Castellano Guía 1 Momento 2Documento8 páginas3º Castellano Guía 1 Momento 2JuanAún no hay calificaciones
- Tarea 3, Unidad 2, SSDocumento30 páginasTarea 3, Unidad 2, SSJuan Jesus RiveraAún no hay calificaciones
- Anexo 1 Rubrica Examen de Grado 2021-2022Documento5 páginasAnexo 1 Rubrica Examen de Grado 2021-2022Kerly Yaselga100% (1)
- Tarea 1Documento5 páginasTarea 1Inaara NuñezAún no hay calificaciones
- Difraccion de Rayos XDocumento4 páginasDifraccion de Rayos XMagda MontielAún no hay calificaciones
- CHM 01 LAB 02 M MCA 0001 01 - 1 SignedDocumento20 páginasCHM 01 LAB 02 M MCA 0001 01 - 1 SignedJorge Hanna AkouriAún no hay calificaciones
- Actividad 4 - Ingeniería Inversa de Una Estrategia de MercadotécniaDocumento4 páginasActividad 4 - Ingeniería Inversa de Una Estrategia de MercadotécniaJonathan RamírezAún no hay calificaciones
- 27T0052 (1) CMC GelatinaDocumento99 páginas27T0052 (1) CMC GelatinahermrzAún no hay calificaciones
- Unidad 3 Distribuciones EspecialesDocumento11 páginasUnidad 3 Distribuciones EspecialescarlosyyudiAún no hay calificaciones
- Clases de MateriaDocumento7 páginasClases de MateriaXTREME P-D79% (56)
- Rúbrica de Evaluación de Proyecto de PrácticaDocumento4 páginasRúbrica de Evaluación de Proyecto de PrácticaJeria MaggyAún no hay calificaciones
- Ajedrez StauntonDocumento24 páginasAjedrez Stauntonrobertovm2002Aún no hay calificaciones