También podría gustarte
- Tarea 01Documento9 páginasTarea 01Manuel Cervera100% (1)
- Resultados 1era EtapaDocumento3 páginasResultados 1era EtapaDavid SáenzAún no hay calificaciones
- Lab 1 Indust SaenzDocumento8 páginasLab 1 Indust SaenzDavid SáenzAún no hay calificaciones
- Labo 4 ControlDocumento19 páginasLabo 4 ControlDavid SáenzAún no hay calificaciones
- Motores Sincronos IIDocumento18 páginasMotores Sincronos IIDavid SáenzAún no hay calificaciones
- Analisis de Sistemas ElectronicosDocumento391 páginasAnalisis de Sistemas ElectronicosJose_R_VelasquezAún no hay calificaciones
- Funcionamiento y principios del motor síncronoDocumento11 páginasFuncionamiento y principios del motor síncronoDavid SáenzAún no hay calificaciones
- Leer - Muy ImportanteDocumento1 páginaLeer - Muy Importantewilliam_pAún no hay calificaciones
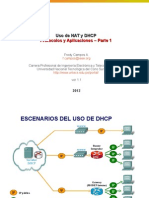
- ARP L3-1 NAT-DHCP v1.1 20120620Documento40 páginasARP L3-1 NAT-DHCP v1.1 20120620David SáenzAún no hay calificaciones
- Circuitos amplificadores operacionales con diodos: limitador paralelo y serie básicosDocumento9 páginasCircuitos amplificadores operacionales con diodos: limitador paralelo y serie básicosjuancamposantoAún no hay calificaciones
- FileDocumento7 páginasFileDavid SáenzAún no hay calificaciones
- Monitero de La Frecuencia Cardiaca ProyectoDocumento11 páginasMonitero de La Frecuencia Cardiaca ProyectoDavid SáenzAún no hay calificaciones
- Caratulas de La UntecsDocumento7 páginasCaratulas de La UntecsDavid SáenzAún no hay calificaciones
- HornerDocumento5 páginasHornerMarily Barillas EspañaAún no hay calificaciones
- Circuitos 2013Documento365 páginasCircuitos 2013David SáenzAún no hay calificaciones
- Motores Sincronos IIDocumento20 páginasMotores Sincronos IIDavid SáenzAún no hay calificaciones
- Packet TracerDocumento5 páginasPacket TracerDavid SáenzAún no hay calificaciones
- Lab 1 Control (Saenz)Documento12 páginasLab 1 Control (Saenz)David SáenzAún no hay calificaciones
- Prob PROPUESTOSDocumento16 páginasProb PROPUESTOSDavid Sáenz0% (1)
- Funcionamiento y principios del motor síncronoDocumento11 páginasFuncionamiento y principios del motor síncronoDavid SáenzAún no hay calificaciones
- Amplificador de 18wDocumento4 páginasAmplificador de 18wDavid SáenzAún no hay calificaciones
- Caratulas de La UntecsDocumento7 páginasCaratulas de La UntecsDavid SáenzAún no hay calificaciones
- Amplificadores transistor bipolar problemasDocumento13 páginasAmplificadores transistor bipolar problemasDavid SáenzAún no hay calificaciones
- Instrumentacion Industrial LABORATORIO N6Documento7 páginasInstrumentacion Industrial LABORATORIO N6David SáenzAún no hay calificaciones
- Control1 (Lab 1) FGHFGDocumento11 páginasControl1 (Lab 1) FGHFGDavid SáenzAún no hay calificaciones
- T. II - LAB. 01 - Labview - Espectro de FrecuenciaDocumento4 páginasT. II - LAB. 01 - Labview - Espectro de FrecuenciaDavid SáenzAún no hay calificaciones
- 2 Ejercicios BJT PDFDocumento11 páginas2 Ejercicios BJT PDFscribdnuevaAún no hay calificaciones
- TrigonometríaDocumento37 páginasTrigonometríaFelipe VergaraAún no hay calificaciones
- DOMOTICA CON Arduino PDFDocumento44 páginasDOMOTICA CON Arduino PDFjdrsant100% (5)
- Manejo de JoystickDocumento1 páginaManejo de JoystickDavid SáenzAún no hay calificaciones
- Mapro Nutricion 2010 Dante Alan López RosalesDocumento36 páginasMapro Nutricion 2010 Dante Alan López RosalesAlan DanteAún no hay calificaciones
- Diferencias entre gráficos vectoriales y mapas de bitsDocumento2 páginasDiferencias entre gráficos vectoriales y mapas de bitsFabian RodriguezAún no hay calificaciones
- Consigna Del PROYECTO FINAL Recursos Audiovisuales 19Documento2 páginasConsigna Del PROYECTO FINAL Recursos Audiovisuales 19sergio AmayaAún no hay calificaciones
- Investigacion 1 Delitos InformaticosDocumento12 páginasInvestigacion 1 Delitos InformaticosIvan de la Cruz100% (1)
- ControlDocumento168 páginasControlJhoan PerezAún no hay calificaciones
- NormalizacionDocumento7 páginasNormalizacionJuan Calzia CamposAún no hay calificaciones
- Sistema de control de activos fijos ITSAE-CADEDocumento5 páginasSistema de control de activos fijos ITSAE-CADEAndrango Efraín RonnalAún no hay calificaciones
- JPEGDocumento10 páginasJPEGVidal Silva PachecoAún no hay calificaciones
- KalfucuraDocumento15 páginasKalfucuraIngridleBrustAún no hay calificaciones
- Configurar Servidor RAS o RIP Con DebianDocumento9 páginasConfigurar Servidor RAS o RIP Con DebianCarlos GarciaAún no hay calificaciones
- Unidad RackDocumento1 páginaUnidad RackLando ParadaAún no hay calificaciones
- Cuestionario, InformaticaDocumento12 páginasCuestionario, InformaticaANNA PAULINAAún no hay calificaciones
- Balance de MateriaDocumento16 páginasBalance de Materiaraihrashebworld barahonaAún no hay calificaciones
- Tabla Aplicacion Productos Termoretractiles 3M EspañaDocumento1 páginaTabla Aplicacion Productos Termoretractiles 3M EspañaAlex RamirezAún no hay calificaciones
- Diferencias microprocesadores y microcontroladoresDocumento3 páginasDiferencias microprocesadores y microcontroladoresarnulfoAún no hay calificaciones
- Guia # 3Documento5 páginasGuia # 3harold vargasAún no hay calificaciones
- Calculo VectorialDocumento6 páginasCalculo VectorialFabio PintoAún no hay calificaciones
- Manual de Sony AspenDocumento80 páginasManual de Sony Aspenpekitapepa85Aún no hay calificaciones
- OTOcam Guía Del UsuarioDocumento20 páginasOTOcam Guía Del UsuarioJuanito Zúñiga GarcíaAún no hay calificaciones
- SILABO DE METODOS ESTADISTICOS - AdministracionDocumento9 páginasSILABO DE METODOS ESTADISTICOS - AdministracionEdwin Johny Asnate SalazarAún no hay calificaciones
- Sistema de Segundo OrdenDocumento4 páginasSistema de Segundo OrdenMisael GómezAún no hay calificaciones
- Lecciones Algebra LinealDocumento138 páginasLecciones Algebra Linealedward034Aún no hay calificaciones
- Paso1 Grupo44 HeidyJulianaSanchezMartinezDocumento6 páginasPaso1 Grupo44 HeidyJulianaSanchezMartinezKok LirAún no hay calificaciones
- Taller Presentacion de Reportes CuantitativosDocumento3 páginasTaller Presentacion de Reportes CuantitativosLaura Sofia Gonzalez VargasAún no hay calificaciones
- 02 Algebra 4ºDocumento22 páginas02 Algebra 4ºRaul Alcantara SanchezAún no hay calificaciones
- Fases de La Ing. de SistemasDocumento3 páginasFases de La Ing. de SistemasCesar Delgado NerioAún no hay calificaciones
- Anexo 1 TipografiaDocumento9 páginasAnexo 1 TipografiaMaría Cielo PeñaAún no hay calificaciones
- Ciberdelitos en España: Impunidad del 95Documento45 páginasCiberdelitos en España: Impunidad del 95SIN PELOS EN LA LENGUA SisisissisAún no hay calificaciones
- Triptico Del Boom de Las Redes SocialesDocumento2 páginasTriptico Del Boom de Las Redes SocialesIluv 28100% (1)