También podría gustarte
- Familias de MicrocontroladoresDocumento42 páginasFamilias de MicrocontroladoresSebastian Villalobos80% (60)
- Microcontroladores-Clasificación-BusDatos-Instrucciones-Arquitectura-FabricantesDocumento4 páginasMicrocontroladores-Clasificación-BusDatos-Instrucciones-Arquitectura-FabricantesDiego Alejandro Maya80% (5)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Unidad I. Arquitectura Interna y Externa Del MicrocontroladorDocumento54 páginasUnidad I. Arquitectura Interna y Externa Del MicrocontroladorFortino60% (5)
- Clasificacion de Los MicrocontroladoresDocumento4 páginasClasificacion de Los MicrocontroladoresCirilo Perez100% (1)
- Arquitecturas Embebidas y MicrocontroladoresDocumento9 páginasArquitecturas Embebidas y MicrocontroladoresAnonymous CLzr2BltYAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Iniciación al diseño de circuitos impresos con Altium DesignerDe EverandIniciación al diseño de circuitos impresos con Altium DesignerAún no hay calificaciones
- Introducción A La Computación (Spanish Edition) - NodrmDocumento51 páginasIntroducción A La Computación (Spanish Edition) - NodrmKaren RuedasAún no hay calificaciones
- Reporte U5Documento20 páginasReporte U5luis angelAún no hay calificaciones
- Reporte Proyecto FinalDocumento25 páginasReporte Proyecto Finalluis angelAún no hay calificaciones
- Microcontrolador WikiDocumento14 páginasMicrocontrolador WikiMakinon Imparable ImparableAún no hay calificaciones
- Microcontrolador guíaDocumento6 páginasMicrocontrolador guíaandre yeraldin mezaAún no hay calificaciones
- Microcontrolador WikiDocumento5 páginasMicrocontrolador WikiAnonymous mShdTiAún no hay calificaciones
- Microcontrolador 40Documento7 páginasMicrocontrolador 40DanielAún no hay calificaciones
- Curso Basico de Pic16f877 PDFDocumento140 páginasCurso Basico de Pic16f877 PDFANGEL RICARDO LICONA RODRIGUEZAún no hay calificaciones
- P00 Arquitectura de Los Microcontroladores PICDocumento12 páginasP00 Arquitectura de Los Microcontroladores PICorlandoAún no hay calificaciones
- Arquitectura de microcontroladores 8 bitsDocumento7 páginasArquitectura de microcontroladores 8 bitsJaphet González BerronesAún no hay calificaciones
- Tutorial para Dummies PICDocumento173 páginasTutorial para Dummies PICPruebas MessAún no hay calificaciones
- Pic 16f628aDocumento10 páginasPic 16f628aedison albaAún no hay calificaciones
- DL 3155M24 SpaDocumento138 páginasDL 3155M24 Spag4r3ckAún no hay calificaciones
- Tarea1 Investigación UberBaque 28.10.2022Documento11 páginasTarea1 Investigación UberBaque 28.10.2022Uber Baque AlmeidaAún no hay calificaciones
- Tecnológico de Estudios Superiores de JocotitlánDocumento7 páginasTecnológico de Estudios Superiores de JocotitlánEmmanuel GonzalezAún no hay calificaciones
- Microcontroladores 1 1Documento89 páginasMicrocontroladores 1 1Erika SamuñiAún no hay calificaciones
- Resumen MicrocontroladoresDocumento10 páginasResumen MicrocontroladoresIvan NuñezAún no hay calificaciones
- Controlador 1.0Documento6 páginasControlador 1.0Jose David FloresAún no hay calificaciones
- MICROCONTROLADORESDocumento39 páginasMICROCONTROLADORESCarlos Lopez100% (1)
- MICROCONTROLADORDocumento5 páginasMICROCONTROLADORElmo ChicharrinAún no hay calificaciones
- ATMEGA328Documento14 páginasATMEGA328Max GroveAún no hay calificaciones
- FACE 2 MICROPROCESADORES Buena TareaDocumento21 páginasFACE 2 MICROPROCESADORES Buena TareaJGarciaAún no hay calificaciones
- PIC16F877Documento140 páginasPIC16F877jaime2828Aún no hay calificaciones
- El PrimerDocumento5 páginasEl PrimerDaniel ZavalaAún no hay calificaciones
- MicrocontroladoresDocumento13 páginasMicrocontroladoresJose AnguloAún no hay calificaciones
- Historia - Micro ControladorDocumento12 páginasHistoria - Micro ControladorJhona T IgAún no hay calificaciones
- Temporizadors Pic16f877aDocumento28 páginasTemporizadors Pic16f877aDanteballenaAún no hay calificaciones
- Programación en Lenguaje EnsambladorDocumento38 páginasProgramación en Lenguaje EnsambladorPreceptor SomaAún no hay calificaciones
- Funciones de Un Microcontrolador y MicroprocesadorDocumento11 páginasFunciones de Un Microcontrolador y MicroprocesadorBryanMendzVntura100% (1)
- Manual de Microprocesador TeiDocumento95 páginasManual de Microprocesador TeiJose NovoaAún no hay calificaciones
- Informe de Microcontroladores Semana05Documento9 páginasInforme de Microcontroladores Semana05Jhonatan N. Cedillo FloresAún no hay calificaciones
- Curso básico de PIC 16F887Documento171 páginasCurso básico de PIC 16F887Ernesto NetoAún no hay calificaciones
- Tema de Investigación:: Pic (Microcontrolador)Documento15 páginasTema de Investigación:: Pic (Microcontrolador)CRISTHIAN ALEXANDER DEL CASTILLO MURILLOAún no hay calificaciones
- Aplicaciones de Los MicrocontroladoresDocumento75 páginasAplicaciones de Los MicrocontroladoresBenny M AcuayteAún no hay calificaciones
- C 3 MicrocontroladoresDocumento36 páginasC 3 Microcontroladorestati4Aún no hay calificaciones
- PIC16F877 - MicrocontroladoresDocumento140 páginasPIC16F877 - MicrocontroladoresJuniorChavezPeralta100% (1)
- LODI T6 MAR 2013 v6Documento63 páginasLODI T6 MAR 2013 v6hhhhhhAún no hay calificaciones
- Microcontrolador WikiDocumento2 páginasMicrocontrolador WikiKARINAAún no hay calificaciones
- TareaDocumento27 páginasTareaIsaac OrozcoAún no hay calificaciones
- Microcontroladores 1Documento48 páginasMicrocontroladores 1Gastón ValenzuelaAún no hay calificaciones
- Manejo de puertos E/S en PIC16F887 y ATMEGA328PDocumento43 páginasManejo de puertos E/S en PIC16F887 y ATMEGA328PJorge Cortés San LázaroAún no hay calificaciones
- Curso Microcontrolador PIC16F84Documento45 páginasCurso Microcontrolador PIC16F84josetantonioAún no hay calificaciones
- Práctica 1Documento13 páginasPráctica 1Mario Esteban Rebollo RebolloAún no hay calificaciones
- Informe ControladorDocumento19 páginasInforme Controladordiegop3Aún no hay calificaciones
- Características y componentes de los microcontroladoresDocumento6 páginasCaracterísticas y componentes de los microcontroladoresFran VegaAún no hay calificaciones
- Informe SemaforoDocumento9 páginasInforme SemaforoWil Fabi LaguatasigAún no hay calificaciones
- Microcontroladores PIC16F886Documento23 páginasMicrocontroladores PIC16F886Francisco Guadalupe Uc CanAún no hay calificaciones
- Características y Uso de Elementos Del MicrocontroladorDocumento31 páginasCaracterísticas y Uso de Elementos Del MicrocontroladorJames BoydAún no hay calificaciones
- MicroControladores PIC PDFDocumento43 páginasMicroControladores PIC PDFULISES GIAMPORTONEAún no hay calificaciones
- Paso 3 MicroprocesadoresDocumento14 páginasPaso 3 MicroprocesadoresYolanda Garcia UrquijoAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- Texto Nivel Basico 1 ComputacionDocumento43 páginasTexto Nivel Basico 1 ComputacionimderAún no hay calificaciones
- Tablas regulares e irregulares en Excel y Google SheetsDocumento3 páginasTablas regulares e irregulares en Excel y Google SheetsimderAún no hay calificaciones
- Funciones-Excel y Hoja de Calculo GoogleDocumento4 páginasFunciones-Excel y Hoja de Calculo GoogleimderAún no hay calificaciones
- Presentaciones PowerPoint GoogleSlidesDocumento7 páginasPresentaciones PowerPoint GoogleSlidesimderAún no hay calificaciones
- Cómo insertar gráficos en ExcelDocumento3 páginasCómo insertar gráficos en ExcelimderAún no hay calificaciones
- Texto 1° Prim ComputacionDocumento40 páginasTexto 1° Prim ComputacionimderAún no hay calificaciones
- Texto Nivel 2 ComputacionDocumento43 páginasTexto Nivel 2 Computacionimder100% (1)
- 5.tema PorcentajeDocumento2 páginas5.tema PorcentajeimderAún no hay calificaciones
- Tema Mecanografia BasicoDocumento31 páginasTema Mecanografia BasicoimderAún no hay calificaciones
- Temas 3 Sec-2019Documento13 páginasTemas 3 Sec-2019imderAún no hay calificaciones
- Material 3ro Sec 3bimDocumento4 páginasMaterial 3ro Sec 3bimimderAún no hay calificaciones
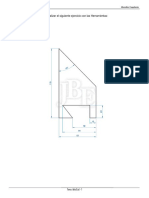
- Ejercicios AutocadDocumento4 páginasEjercicios AutocadimderAún no hay calificaciones
- Autocad Cap2Documento1 páginaAutocad Cap2medranoAún no hay calificaciones
- Material 6 Sec 2019Documento10 páginasMaterial 6 Sec 2019imderAún no hay calificaciones
- Material 5 Sec 2019Documento10 páginasMaterial 5 Sec 2019imderAún no hay calificaciones
- 2do de Primaria Libro MejoradoDocumento69 páginas2do de Primaria Libro Mejoradoimder100% (1)
- Plan Curricular Anual Informatica 2019Documento8 páginasPlan Curricular Anual Informatica 2019imder100% (2)
- Trabajo de Redes Bayesianas - AprobacionDocumento8 páginasTrabajo de Redes Bayesianas - AprobacionimderAún no hay calificaciones
- Temas 2 Sec-2019Documento6 páginasTemas 2 Sec-2019imderAún no hay calificaciones
- Material 3 PRIM 2019Documento4 páginasMaterial 3 PRIM 2019imderAún no hay calificaciones
- Material 4 PRIM 2019Documento6 páginasMaterial 4 PRIM 2019imderAún no hay calificaciones
- Material 6 PRIM 2019Documento8 páginasMaterial 6 PRIM 2019imderAún no hay calificaciones
- Personalizar Sublime Text 3Documento2 páginasPersonalizar Sublime Text 3imderAún no hay calificaciones
- Material 3 PRIM 2019Documento4 páginasMaterial 3 PRIM 2019imderAún no hay calificaciones
- Cuaderno Computacion PrimDocumento12 páginasCuaderno Computacion Primimder100% (1)
- Informe de Pasantia - para ContDocumento7 páginasInforme de Pasantia - para ContimderAún no hay calificaciones
- Examen Info UmsaDocumento1 páginaExamen Info UmsaimderAún no hay calificaciones
- Modelo Proyectos PasantiaDocumento3 páginasModelo Proyectos PasantiaimderAún no hay calificaciones
- PHP MotionDocumento8 páginasPHP MotionimderAún no hay calificaciones
- Cableado EstructuradoDocumento78 páginasCableado Estructuradoparayasa50Aún no hay calificaciones
- La Clasificación de Las Computadoras Por TamañoDocumento17 páginasLa Clasificación de Las Computadoras Por Tamañojesus manuelAún no hay calificaciones
- Informe Oficial2Documento17 páginasInforme Oficial2Marcelo Arce OrellanaAún no hay calificaciones
- Explique La Diferencia Entre Computación y ComputadoraDocumento5 páginasExplique La Diferencia Entre Computación y ComputadoraEvilLordMuMexAún no hay calificaciones
- 8 La Memoria RamDocumento40 páginas8 La Memoria RamVargas Limachi Kevin EdsonAún no hay calificaciones
- GRAFENODocumento7 páginasGRAFENOruben colmenaresAún no hay calificaciones
- Actividad #3 de Software - Rojas Molina Karen Paola 10-02Documento5 páginasActividad #3 de Software - Rojas Molina Karen Paola 10-02karen paola rojas molinaAún no hay calificaciones
- Mantenimiento PreventivoDocumento73 páginasMantenimiento PreventivoRosalba Esther Pedraza MendezAún no hay calificaciones
- Informatica AdministrativaDocumento102 páginasInformatica AdministrativaFelipe100% (1)
- ASRock Z68 Extreme7 Gen3Documento26 páginasASRock Z68 Extreme7 Gen3Thony Blade'sAún no hay calificaciones
- Bodega devolutivos reintegrados equiposDocumento12 páginasBodega devolutivos reintegrados equiposandres torres burgosAún no hay calificaciones
- Modulo Introduccion Al Sonido en VivoDocumento120 páginasModulo Introduccion Al Sonido en VivoJorge Andres100% (5)
- 08manual de Operaciones Science Cube ProDocumento62 páginas08manual de Operaciones Science Cube ProcachilowiAún no hay calificaciones
- Manual 3Documento149 páginasManual 3krozzbyAún no hay calificaciones
- UF1349 02 Sminker GonzálezDocumento13 páginasUF1349 02 Sminker GonzálezSminker GonzalezAún no hay calificaciones
- Evolución Videojuegos Debate EfectosDocumento3 páginasEvolución Videojuegos Debate EfectosFernando Alonso100% (8)
- Informe de Analisis de Factibilidad EmpresaDocumento6 páginasInforme de Analisis de Factibilidad EmpresaAlberth ZirusAún no hay calificaciones
- Los Circuitos IntegradosDocumento4 páginasLos Circuitos IntegradosAdrian PeñaAún no hay calificaciones
- Corselca CatalogoDocumento31 páginasCorselca CatalogoPaulo CondeAún no hay calificaciones
- CMH5GQW4VA202H: Especifi CacionesDocumento1 páginaCMH5GQW4VA202H: Especifi CacionesSAMUEL GILBER ORTIZ JAIMESAún no hay calificaciones
- Trabajo de MicroprocesadoresDocumento9 páginasTrabajo de MicroprocesadoresJuan Carlos Melo GutiérrezAún no hay calificaciones
- Actividad T1-01-Reporte de InvestigaciónDocumento21 páginasActividad T1-01-Reporte de InvestigaciónHecsali SalinasAún no hay calificaciones
- Errores Al Armar PCDocumento2 páginasErrores Al Armar PCAnthony Torres YepezAún no hay calificaciones
- Instituto Tecnologico Superior de Misantla: Actividad 1: Investigación de Los Contenidos de La Unidad 1Documento21 páginasInstituto Tecnologico Superior de Misantla: Actividad 1: Investigación de Los Contenidos de La Unidad 1eder mogollonAún no hay calificaciones
- Sistema CCTV IPDocumento12 páginasSistema CCTV IPEsmeralda1419Aún no hay calificaciones
- Revista# 48aDocumento84 páginasRevista# 48adiego1alberto-2Aún no hay calificaciones
- Cursos y Detalle de LaptopsDocumento4 páginasCursos y Detalle de LaptopsravegastuAún no hay calificaciones
- FileMaker ProDocumento46 páginasFileMaker ProJosé Luis Carrasco RavanalAún no hay calificaciones
- 0 Ficha Tecnica de Equipo de ComputoDocumento2 páginas0 Ficha Tecnica de Equipo de ComputoHERRERAAún no hay calificaciones
- Algoritmos C# UNADDocumento187 páginasAlgoritmos C# UNADFrancisco Javier Galeano100% (2)