SEDE TALCA CONSTRUCCIN CIVIL
TECNOLOGAS DE INFORMACIN PARA LA CONSTRUCCIN
MAQUINARIA CONTROLADA A DISTANCIA
PROFESOR:
MANUEL NORAMBUENA CCERES
ALUMNO PATRICIO REYES MEDEL
GRUPO 6 (FECHA 03 de Septiembre de 2012) 2 Semestre 2012
INTRODUCCIN.
�SEDE TALCA CONSTRUCCIN CIVIL
En el presente informe se abordarn diversos temas relevantes en lo que respecta a la realizacin de las primeras maquinas y equipos de construccin con el fin de ahorrar mano de obra, la necesidad ya era tangible en el siglo pasado, pero dicha necesidad y gracias al apoyo de la tecnologa ha sufrido una transformacin en el tiempo, desde que eran maquinas naturalmente de traccin animal, pasando por las maquinas de traccin a vapor, hasta la implementacin hoy en da de controles a distancia en ciertas maquinas para las actividades ms peligrosas, resguardando por sobre todo la seguridad de los trabajadores.
OBJETIVOS
�SEDE TALCA CONSTRUCCIN CIVIL
Objetivo General. La innovacin sigue creciendo y se va adecuando a las necesidades de los sectores productivos del pas, especialmente la construccin y la minera. El objetivo es producir ms en menos tiempo, en una operacin que no represente riesgos, ni accidentes. Seguridad y productividad, es el foco. La tecnologa, nuevamente juega un rol fundamental. La premisa es suministrar herramientas que faciliten la labor del hombre, en lugares y tiempos donde ste se ve limitado. Manejar las maquinarias a distancia facilitara ese proceso. Objetivos Especficos. Innovaciones en los primeros aos para ahorrar mano de obra, primero en agricultura, despus en construccin, los dos encajndose en una vigorosa tradicin de mecanizacin. Definicin de maquinaria. Identificar las Caractersticas de las Maquinas controladas a distancias. La preocupacin por el bienestar de los operadores es uno de sus principales objetivos. La Aplicacin de Tecnologa de punta que busca generar operaciones menos riesgosas y aumentar los ndices de productividad. Una tendencia que va creciendo y diversificndose. Cualquier funcin o proceso de una mquina que pueda causar lesiones debe tener proteccin. DESARROLLO.
Historia de la Maquinaria.
�SEDE TALCA CONSTRUCCIN CIVIL Los Estados Unidos fueron los primeros en desarrollar innovaciones para ahorrar mano de obra, primero en agricultura, despus en construccin, los dos encajndose en una vigorosa tradicin de mecanizacin. El Reino Unido y Europa se hallaban en considerable atraso en ambos sectores, probablemente debido a la abundancia de mano de obra y la menor escala de las obras para realizar. La historia del mejoramiento en el diseo de mquinas, que se dio principalmente en los Estados Unidos, nos da una fascinante ilustracin del principio de cmo la forma sigue la funcin. La especializacin del equipamiento de mover tierra, esencialmente como funcin de la distancia de acarreo, hizo aparecer la niveladora, el raspador, el bulldozer, el compactador, el cargador y el tractor agrcola. Este proceso se dio ms o menos alrededor de los 1880 hasta el final de la primera guerra mundial. Ya en esta poca todos haban adquirido su silueta familiar. El diseo elegante y utilitario del tractor de hacienda cambi poco en los ltimos noventa aos. El tamao y la potencia de los motores incrementaron, los motores diesel se volvieron bastante universales, as como los sistemas hidrulicos. Al umbral de la segunda guerra mundial la maquinaria de construccin haba llegado grosso modo a su forma actual. Niveladora. La primera niveladora reconocible apareci en 1886. Era naturalmente de traccin animal, sin embargo se ve asombrosamente similar a su descendiente, fotografiado al mismo lugar 100 aos despus. Imagen N1. Primera Niveladora
Fuente: www.monografias.com
�SEDE TALCA CONSTRUCCIN CIVIL
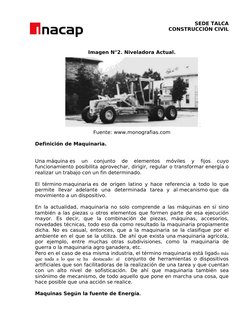
Imagen N2. Niveladora Actual.
Fuente: www.monografias.com Definicin de Maquinaria. Una mquina es un conjunto de elementos mviles y fijos cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energa o realizar un trabajo con un fin determinado. El trmino maquinaria es de origen latino y hace referencia a todo lo que permite llevar adelante una determinada tarea y al mecanismo que da movimiento a un dispositivo. En la actualidad, maquinaria no solo comprende a las mquinas en s sino tambin a las piezas u otros elementos que formen parte de esa ejecucin mayor. Es decir, que la combinacin de piezas, mquinas, accesorios, novedades tcnicas, todo eso da como resultado la maquinaria propiamente dicha. No es casual, entonces, que a la maquinaria se la clasifique por el ambiente en el que se la utiliza. De ah que exista una maquinaria agrcola, por ejemplo, entre muchas otras subdivisiones, como la maquinaria de guerra o la maquinaria agro ganadera, etc. Pero en el caso de esa misma industria, el trmino maquinaria est ligado ms que nada a lo que se ha destacado: al conjunto de herramientas o dispositivos artificiales que son facilitadoras de la realizacin de una tarea y que cuentan con un alto nivel de sofisticacin. De ah que maquinaria tambin sea sinnimo de mecanismo, de todo aquello que pone en marcha una cosa, que hace posible que una accin se realice. Maquinas Segn la fuente de Energa.
�SEDE TALCA CONSTRUCCIN CIVIL Se toma como referencia el tipo de motor de la mquina, definindose motor como: Sistema material que transforma una determinada clase de energa (hidrulica, qumica, elctrica, etc.) en energa mecnica y produce movimiento. Imagen N3. Fuentes de Energa para maquinarias.
Fuente: www.monografias.com Segn el sistema de traslacin. Son clasificados en funcin al mtodo de transporte, las dimensiones y peso de la maquinaria. Imagen N4. Sistema de Traslacin.
Fuente: www.monografias.com Segn las operaciones que realizan.
�SEDE TALCA CONSTRUCCIN CIVIL
Se clasifican segn las operaciones comunes que realizan las maquinas.
Imagen N5. Operaciones que realizan.
Fuente: www.monografias.com. Maquinaria Controlada a Distancia. Existen dos tipos de ventajas, se tienen las ventajas tcnicas y las comerciales. Las primeras, estn asociadas al hecho que al trabajar con equipos a control remoto el operador puede tener una mejor visibilidad del rea, lo que le permite hacer movimientos ms eficientes y con mayor exactitud, alejndose de eventuales peligros. Hay que tener presente que si bien estas maquinarias traen exclusivos avances tecnolgicos que minimizan los riesgos de las operaciones, la seguridad depender en gran parte de la responsabilidad del trabajador que la maneje. Las ventajas comerciales, se resumen en la reduccin de elementos necesarios para su operacin, puesto que con control remoto slo se requiere el manejo de un operador. A su vez, el uso de esta tecnologa permite ahorrar tiempo de trabajo. El desarrollo e insercin en el mercado de estas tecnologas requiere un tiempo no muy corto, ya que tiene que ver con otros factores aparte de la tecnologa, como son por ejemplo nuevas leyes o regulaciones, disponibilidad o falta de mano de obra, costos y nuevos mtodos de construccin, entre
�SEDE TALCA CONSTRUCCIN CIVIL otros. Sin embargo, los clientes que han tenido acceso a esta tecnologa estn asombrados del control que se puede tener del equipo y de lo exacto que puede ser el trabajo. Las Maquinarias autnomas, robots y equipos controlados de forma remota en lnea, son algunas de las innovaciones que van ganando terreno. Si bien, el desarrollo tecnolgico implicar una inversin inicial mayor, en el mediano plazo, stas rentabilizarn, coinciden los expertos. Es el futuro de las mquinas. Gigante Autnomo. (Camin KOMATSU 930E 4AT) Hasta ahora, el mayor quiebre tecnolgico relacionado con la operacin a distancia se ha gestado en las faenas mineras. Y es que en ellas, las obras se circunscriben a rutas o acciones repetitivas. Un escenario un tanto distinto al de la construccin, que generalmente no presenta obras con dichas caractersticas. Los estndares de seguridad y la bsqueda de procesos ms productivos, han derivado en la automatizacin y robotizacin de las operaciones mineras. En este plano, Komatsu desarroll el camin autnomo 930E4AT, un equipo controlado por sistema GPS que es capaz de maniobrar sin operador por 24 horas continuas. Se trata de un equipo que contiene componentes electrnicos e hidrulicos que conforman un sistema integrado de comunicacin inalmbrica, navegacin satelital e inercial que le permite posicionarse en las reas de carga y descarga, manejando asimismo la interaccin con el resto de los equipos que pertenecen al sistema, operando en la descarga en talud, a piso o en chancador. El camin 930E4AT detecta automticamente otros equipos de apoyo y otros obstculos, tanto virtuales como reales, para evitar accidentes. La central del sistema comprende una sala de servidores, pantallas de visualizacin y control, desde donde el operador puede ordenar a los camiones los puntos de origen y destinos (carga, descarga) y/u otras operaciones bsicas tales como detenerse o colocar en marcha. Esta tecnologa se comenz a probar en 2005 en las operaciones de Radomiro Tomic, y en 2007 se implement como operacin rutinaria con una flota de 11 camiones en la mina Gabriela Mistral. Dado el desarrollo de la tecnologa AHS la empresa Ro Tinto adquiri 150 equipos autnomos, para operar en Australia. La ventaja de esta tecnologa es que reduce los riesgos de accidentes por somnolencia, distracciones, interaccin entre distintos equipos. Se reduce el riesgo de colisiones. Y una de las mayores ventajas del sistema es lo
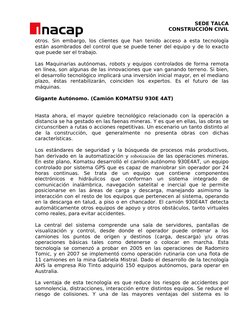
�SEDE TALCA CONSTRUCCIN CIVIL repetitivo del proceso, siempre va a recorrer la ruta de la misma forma, la variabilidad del proceso es menor. Para aumentar los estndares de seguridad y mantenimiento del camin, se mejor el software y se aplicaron sistemas redundantes de navegacin que no dependen slo del GPS. Un navegador interno puede controlar el camin en periodos cortos de tiempo en la eventualidad de que la seal satelital se pierda o tenga poca visibilidad. El camin autnomo funciona dentro de su curva de desempeo y as, en el largo plazo, la operacin autnoma tiene una mayor productividad, por tener una mejor utilizacin. Tiene que ver con menor consumo de combustible, neumticos, una operacin controlada y menos desgaste por concepto de amortiguacin y frenado. Todo esto se ejecuta a travs de un mecanismo controlado y no depende del operador. Lo relevante en trminos de optimizacin, tiene relacin con una adecuada planificacin del desarrollo de una mina para operaciones de camiones AHS. Finalmente, el desafo y las expectativas del sector, tienen que ver con el manejo de mayores volmenes, minas ms profundas y la aplicacin de la automatizacin en contextos ms complejos de la mina. Imagen N6. Camin KOMATSU 930E 4AT
Fuente: www.biblioteca.cchc.cl Pequeo limpiador (El Dugless 900).
�SEDE TALCA CONSTRUCCIN CIVIL
�SEDE TALCA CONSTRUCCIN CIVIL La empresa ProCleanMG presenta una solucin tecnolgica para la limpieza de las correas trasportadoras y ambientes con polvo en suspensin. Se trata de un equipo diseado y construido en Australia que recoge el material que se acumula bajo las cintas transportadoras en la minas, sin interrumpir la operacin de stas. Un avance tecnolgico y productivo, puesto que normalmente ese trabajo es realizado por operarios, lo que obliga a detener las faenas, perdiendo importantes minutos de produccin. El Dugless 900 es un pequeo limpiador, controlado remotamente, cuya longitud (560 mm de altura, por 1050 mm de ancho y 2242 mm de largo), le permiten introducirse bajo las cintas. Este equipo ha encontrado una rpida aceptacin a nivel mundial desde su lanzamiento en el ao 2009. Principalmente por su aplicacin en la limpieza bajo correas transportadoras as como en el manejo peligroso de materiales. Su ventaja est en el aumento en la seguridad de los trabajadores y del proceso productivo, la eliminacin de trabajos manuales bsicos en zonas de alto riesgo y la disminucin de tasas de fallas debido a acumulacin de material. Caractersticas. Las principales caractersticas del equipo radican en un motor de 2 cilindros, enfriado por aire y con inyeccin diesel. Su potencia continua es de 16HP. Su peso es de 900 Kg. Destaca su sistema de apagado automtico frente a anomalas en la lectura de su computador a bordo, tanto en temperaturas, niveles y presiones del equipo. Este sistema se activa desde el control remoto al percibir golpes, ngulos mayores a 45 grados o bajas de seal, la cual puede llegar sin problemas a los 100 m. Dependiendo la zona de trabajo Dugless 900 puede usarse con cmaras inalmbricas as
�SEDE TALCA CONSTRUCCIN CIVIL como utilizar demarcacin en el lugar de trabajo con tecnologa lser. Sus orugas son de acero cubierto en goma, lo que permite una gran adherencia y su velocidad de desplazamiento es de 3.5Km/hra. Imagen N9. Dugless 900
Fuente: www.minprovise.com.au Compacto y seguro (BobCat). La maquinaria controlada en forma remota ha sido una solucin para enfrentar situaciones u obras que representan un peligro para el operador. Este es el caso del minicargador Bobcat que est diseado para desenvolverse en la construccin, operaciones mineras o en todo tipo de actividades industriales como plantas de sustancias o vapores peligrosos. Adems, como parte de la propuesta de valor de Bobcat tiene que ver con el desarrollo de aditamentos, con el sistema de control remoto, no slo se opera el minicargador con el balde, sino que se pueden operar ms de 35 aditamentos, como el martillo hidrulico, garras, barredoras, fresadoras, rodillos compactadores. Uno de los atributos de este equipo es su flexibilidad. No slo se controla remotamente, sino que puede operarse indistintamente con operador, aportando a la flexibilidad en el uso del equipo y bajando comparativamente la inversin necesaria para acceder a esta tecnologa. Caractersticas.
�SEDE TALCA CONSTRUCCIN CIVIL El minicargador Bobcat alcanza una velocidad mxima de desplazamiento de 10 km/h. El radio de accin de la seal del control remoto inalmbrico es de aproximadamente 500 m. Para su uso, es necesario el contacto visual con el cargador y su ruta. El transmisor detiene el motor, si es que se inclina a ms de 45 en cualquier direccin, y est equipado con una barra de proteccin para evitar la activacin accidental de los controles. Respecto a la especificacin de la batera del sistema remoto, sta tiene una carga de 9,6 voltios de corriente continua y su rendimiento es de 15 horas. En lo que respecta a equipos operados por control remoto, an estamos en una etapa de introduccin de esta tecnologa, mostrndola a clientes y comprendiendo profundamente las necesidades especficas de cada mercado y/o aplicacin, por lo que creemos que por un tiempo nos abocaremos a esta tarea. Esto se complementar a fines de este ao con el rediseo de la mayor parte de nuestra lnea de minicargadores, que busca crear equipos ms compactos, ms econmicos en su operacin y mejorar considerablemente las prestaciones para el operador. Ms control. (Gra PK85002) Definitivamente la tendencia es clarsima e irrefutable, se estn usando las mquinas con control remoto en prcticamente todos los sectores. No obstante, nuevamente la minera se presenta como el punto de origen y en el caso de las gras, fue este sector quien empez a exigir equipos controlados en forma remota. Si tomamos las tendencias europeas y americanas, esto viene desde hace mucho tiempo, por lo que la minera lo que hizo fue slo acelerar el proceso y promoverlo a travs del xito de su uso. Uno de los atributos de las gras con control remoto es la preocupacin por la eficiencia y seguridad en el trabajo, lo que gener el inters por probar la tecnologa. Siempre existi la necesidad de levantar elementos pesados, entonces a medida que la tecnologa fue avanzando y demostrando que se poda hacer el mismo trabajo con menos operadores, menos riesgo y en menor tiempo
�SEDE TALCA CONSTRUCCIN CIVIL fue generando un inters en el mercado. En definitiva, en faenas donde antes se necesitaban dos o tres personas, con el control remoto, slo se necesita un operador. Imagen N11. Gra PK85002
Fuente: www.mycsamulder.es Caractersticas. Las gras cuentan con operacin remota, enfriador de aceite, gatos de apoyos abatibles en 180 y un sistema de doble palanca articulada. Destaca el modelo PK 85002 performance que es una de las ms potentes en la liga de los pesos pesados. Ofrece un alcance de 34.6 m. El peso propio de la gra con gatos es de 6589kg, Anchura de apoyo estndar 8,6 m, una mxima capacidad de 25000kg y una Anchura de la gra plegada 2,55 m
�SEDE TALCA CONSTRUCCIN CIVIL
Robots. El mercado ofrece diversas soluciones de demolicin en la que utiliza una gama de equipos robotizados controlados a distancia. El objetivo es realizar faenas peligrosas sin correr riesgos. La tcnica se sustenta en mquinas teledirigidas que se caracterizan por su potencia y maniobrabilidad. Sus dimensiones les permiten ubicarse en rincones poco asequibles y ser instalados y levantados mediante gras en el lugar de la obra. Los robots se adaptan a diversas situaciones pues pueden trabajar con martillos o cizallas hidrulicas, demoledoras o fresadoras. Dichos robots trabajan con mayor rapidez y potencia que cualquier mtodo manual o mquina tradicional, convirtindose en un sistema altamente eficiente. Otra ventaja es que al no contaminar pueden trabajar en lugares sin mucha ventilacin, pues son elctricos. Caractersticas.
�SEDE TALCA CONSTRUCCIN CIVIL Los robots, son dirigidos por control remoto y pueden llegar a trabajar a una distancia de hasta 100 metros, pero esto impide la visibilidad del operario a no ser que tuvieran instalado un sistema de monitoreo. Estn especialmente diseados para demoliciones tcnicas y quirrgicas donde la precisin, la eficiencia y la seguridad son indispensables para el xito del trabajo. Para situaciones en que las mquinas tradicionales de demolicin no tienen acceso, ya sea por la altura en que estn las demoliciones a realizar, o bien otras situaciones que impiden el ingreso de mquinas ms grandes y pesadas, los robots tienen el mismo costo ya que tienen un alto rendimiento. En aquellas situaciones donde es posible el ingreso de maquinaria tradicional tenemos un costo marginal dependiendo de las condiciones particulares que tenga la estructura a demoler. Maquinaria autnoma y controlada a distancia. Tecnologa al servicio de la seguridad y la productividad. Es el futuro de las mquinas. Imagen N13. Robot BROKK.
Fuente: www.anzeve.com
Gras Automontables.
�SEDE TALCA CONSTRUCCIN CIVIL
Su principal caracterstica es la facilidad para su montaje. Mientras que algunas versiones tienen una cabina para el operador en el brazo, las gras de montaje rpido suelen ser controladas a distancia desde el suelo. A diferencia de las gras torre, el contrapeso est situado en la base ya que el giro se efecta desde sta. La altura y el radio de alcance son inferiores a los de la gra torre. La gama de gras Automontables existentes en el mercado es muy extensa. Las tres caractersticas principales son la altura til bajo el gancho, la longitud de la pluma y la capacidad de carga. De entre los lderes mundiales de fabricacin de gras Automontables como Potain o Liebherr estos valores varan entre 16m y 34m; 20m y 50m; 600kg y 1.400kg respectivamente. Constructivamente son dos tipos de estructura los que predominan. Por un lado existen las gras con un mstil de viga-cajn. En este caso las gras son de un tamao muy reducido y el montaje se realiza mediante un pistn hidrulico que eleva el mstil y la pluma (figura 14).Las ms comunes y que permiten alturas mayores tienen el mstil fabricado con una celosa y la elevacin del mismo se realiza con un sistema de cables y poleas. Imagen N15. Gra Automontable con mstil de viga
�SEDE TALCA CONSTRUCCIN CIVIL Fuente: www.es.scribd.com Autobombas de hormign. Estas bombas de hormign estn basadas en el trabajo pionero realizado por las empresas en este campo tecnolgico. Durante 50 aos, y en todo el mundo, han venido demostrando su valor como animales de carga indestructibles y pacientes en las difciles condiciones de las obras de construccin. Sus grandes reservas de potencia las hacen adecuadas para las condiciones ms extremas, reducen el desgaste mecnico y garantizan un alto nivel de disponibilidad para la operacin. Incluso en condiciones de trabajo difciles, siempre son cmodas de operar y mantener. Todo esto contribuye al reconocido valor de reventa de las bombas de hormign. Considerando todos los factores, resulta una relacin coste/ beneficio muy favorable, lo que convierte las convierte en una inversin de futuro sin riesgos. La gama de bombas de hormign montadas sobre camin, con sus numerosos modelos bsicos orientados al mercado, cubre una amplia variedad de aplicaciones. Cualquier bomba puede adaptarse a sus requisitos especiales con una serie de opciones extras. Sus Dimensiones van desde los 20m hasta los 60 metros de alcance. Imagen N15. Autobombas de Hormign.
Fuente: www.putzmeister.es La intervencin de bombas de pluma de gran alcance depende cada vez ms de que las obras dispongan de espacio suficiente para la colocacin estable de la mquina. Las duras condiciones reales de una obra son una prueba muy dura para la resistencia de las plumas que, adems, han de ser ligeras para que el
�SEDE TALCA CONSTRUCCIN CIVIL vehculo tenga reservas de peso para accesorios y equipos. Conseguir conjugar las dos caractersticas es una exigencia que se tiene en cuenta en el dimensionado y el diseo de las plumas y las infraestructuras. El innovador mando EBC para autobombas (Ergonic Boom Control) fue el primero de los sistemas Ergonic y represent una revolucin en el manejo de plumas. La pluma se dirige, asistida por ordenador, con total comodidad y precisin. Adems permite aumentar el rendimiento de bombeo de la bomba de hormign. El maquinista de la bomba tiene menos trabajo y puede concentrarse mejor en el entorno y en el movimiento de la manguera final. Un sencillo control con palanca de mando permite desplazar la pluma con precisin milimtrica en direccin horizontal y vertical, todo con una sola mano (One Touch Control). Menor rebote de la pluma. Mayor seguridad en la obra. Mayor ergonoma para el operador. Control vertical preciso y uniforme de la manguera final. Seguridad de operacin y eficacia con plegado semiautomtico. Mayor superficie de trabajo en modelos desplazables y plegables. Imagen N16. Mando EBC para autobombas.
�SEDE TALCA CONSTRUCCIN CIVIL
Fuente: www.putzmeister.es Al girar la palanca de mando, la manguera final se desplaza proporcionalmente, con precisin puntual, hacia arriba o abajo. Una ventaja crucial en el hormigonado de encofrados, pilares y muros. En el hormigonado por capas de grandes soleras, la manguera final ha de introducirse varias veces de forma consecutiva, con suma precisin, en diferentes puntos de la armadura. Una bomba con EBC es sensiblemente ms rpida y tiene un rendimiento de aportacin claramente ms alto. Con el modo EBC preseleccionado se activa automticamente la amortiguacin al desplazar la pluma. En el bombeo (sin desplazamiento de la pluma) hay que activar la amortiguacin en la palanca de mando izquierda. Independientemente del rendimiento, el EBC compensar las vibraciones de la pluma. Una manguera final tranquila es ms fcil de guiar y el hormign se distribuye con toda limpieza; un autntico alivio para el operario que gua la manguera. Imagen N16. Autobombas de Hormign.
�SEDE TALCA CONSTRUCCIN CIVIL
Fuente: www.putzmeister.es Discos compactadores. Para evitar los accidentes de tener un hombre trabajando en zanjas, se colocan algunas veces compactadores de pisones al brazo de una excavadora para lograr la compactacin del relleno en zanjas. Como otros problemas importantes que se presentan en el uso de este tipo de maquinaria (vibraciones), es el uso de compactadores mediante sistemas de control remoto, de tal forma que el trabajador puede dirigir el compactador desde cierta distancia visionando la zona de trabajo sin necesidad de adoptar posturas forzadas de cuello y tronco Las apisonadoras se utilizan ptimamente en la construccin de zanjas para cables y tuberas de gas y en toda clase de compactaciones en zanjas estrechas. La versin con mando a distancia ofrece la mxima seguridad en zanjas profundas y confort de manejo para el personal y libertad lateral total de los bandajes. Accionamiento totalmente hidrosttico: marcha, direccin y vibracin completamente libres de mantenimiento; sin correas. Imagen N16. Discos Compactadores.
�SEDE TALCA CONSTRUCCIN CIVIL
Fuente: www.monografias.com La exposicin continua a vibraciones mano-brazo tiene una serie de sntomas tempranos como el entumecimiento de los dedos, cosquilleo, etc., pero pueden empeorar a dolor en las muecas, brazos, codos y hombros seguidos por daos en el sistema nervioso y las articulaciones. El sndrome de vibracin en mano-brazo es el trmino usado para describir los estados mdicos causados por las herramientas de mano que trasmiten su vibracin al usuario. Entre estas situaciones mdicas se encuentran el sndrome del tnel carpiano, tendinitis, circulacin dbil en las manos, reduccin de la fuerza en brazos y dedos, e incremento de la sensibilidad.
Conclusin.
En el informe se dieron a conocer diferentes factores por los cuales ciertas equipos o maquinas de construccin y minera son radio controlados, y
�SEDE TALCA CONSTRUCCIN CIVIL dirigidos a distancia, con dicho avance tecnolgico las tareas que se vieron difciles en un comienzo, como la demolicin, las limpiezas de cintas transportadoras etc., hoy en da gracias al control a distancia de estos equipos se pueden realizar casi sin riesgo alguno para su operador lo que facilita las labores y su seguridad e integridad.
Bibliografa.
<http://www.cat.com/cda/layout?m=237284&x=9>. [Fecha de Consulta: 01 de Septiembre de 2012].
�SEDE TALCA CONSTRUCCIN CIVIL <http://www.galeon.com/hamd/pdf/1libro1.pdf>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://www.monografias.com/trabajos-pdf/maquinaria-equipoconstruccion/maquinaria-equipo-construccion.pdf>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://www.aqua.cl/noticias/index.php?doc=51990>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://www.ehowenespanol.com/tipos-gruas-torre-lista_123250/>. [Fecha de Consulta: 01 de Septiembre de 2012]. <http://www.asiquim.cl/web/Legistacion/Legislacion%20Actual/ds594_2.pdf>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://www.transgruas.com/es/producto/pid492/grua-fassi-de-42-5-tonsobre-iveco-ad260t33.htm>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://html.rincondelvago.com/aparatos-de-elevacion-motorizados.html>. [Fecha de Consulta: 01 de Septiembre de 2012]. <http://www.maquitec.mx/#!__compactadoras>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://biblioteca.cchc.cl/DataFiles/25009-2.pdf>. [Fecha de Consulta: 01 de Septiembre de 2012]. <http://www.anzeve.com/data/cat_brokkgeneral_es.pdf>. Consulta: 02 de Septiembre de 2012]. <http://minprovise.com.au/wpcontent/uploads/2011/06/13283EffDugless900Brochure.pdf>. Consulta: 01 de Septiembre de 2012]. [Fecha de
[Fecha
de
<http://www.mycsamulder.es/Raiz_desarrollo/v4/pdf/pk85002c_cat.pdf>. [Fecha de Consulta: 02 de Septiembre de 2012]. <http://es.scribd.com/doc/17688577/15/Descripcion-general-de-la-gruaautomontable>. [Fecha de Consulta: 02 de Septiembre de 2012].
�SEDE TALCA CONSTRUCCIN CIVIL