También podría gustarte
- Trabajos en AlturaDocumento44 páginasTrabajos en AlturaroyAún no hay calificaciones
- Proyectos de Gestion Ambiental en El CuscoDocumento4 páginasProyectos de Gestion Ambiental en El CuscoDiego Caballero PachecoAún no hay calificaciones
- Rodrigo Henriquez Tarea6Documento4 páginasRodrigo Henriquez Tarea6Rodrigo Henriquez Beecher100% (4)
- Caso Uso Rep Viátic NominaDocumento4 páginasCaso Uso Rep Viátic NominaDAXDEXAún no hay calificaciones
- El Segundo Militarismo y La Reconstrucción NacionalDocumento1 páginaEl Segundo Militarismo y La Reconstrucción NacionalRacso Chingay BustamanteAún no hay calificaciones
- Cuestionario Trabajo RemotoDocumento1 páginaCuestionario Trabajo RemotoEnrique TerronesAún no hay calificaciones
- BPM de VinosDocumento11 páginasBPM de VinosJavier Quispe Manotupa0% (1)
- CASO 1-2 Farmacologia ResumenDocumento22 páginasCASO 1-2 Farmacologia ResumenDanny Xavier Campoverde EspinozaAún no hay calificaciones
- Notificacion Al Deudor Cedido - Cesion de Derechos Litigiosos - 72Documento3 páginasNotificacion Al Deudor Cedido - Cesion de Derechos Litigiosos - 72Mirian PintosAún no hay calificaciones
- Física II, Lab IV, Untiveros Cancho CarlosDocumento6 páginasFísica II, Lab IV, Untiveros Cancho CarlosLudang OAAún no hay calificaciones
- TARIFA2018 IgecemDocumento1 páginaTARIFA2018 Igecemisaac_alcantara_glezAún no hay calificaciones
- Manual para Implementación de Un Nuevo Plan de Mantenimiento de Activos en Una OrganizaciónDocumento18 páginasManual para Implementación de Un Nuevo Plan de Mantenimiento de Activos en Una OrganizaciónFelipe ArayaAún no hay calificaciones
- Desarrollo de Inteligencia ArtificialDocumento3 páginasDesarrollo de Inteligencia ArtificialSebastian Lerma LimonAún no hay calificaciones
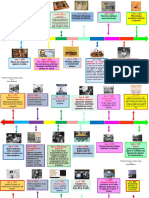
- Linea Del Tiempo Del AjedrezDocumento3 páginasLinea Del Tiempo Del AjedrezSonia López Peregrino86% (14)
- EL PLAN MOLOTOV (1)Documento2 páginasEL PLAN MOLOTOV (1)desbloque celularAún no hay calificaciones
- Universidad Tecnológica de Santiago PracticaDocumento2 páginasUniversidad Tecnológica de Santiago PracticaPedro Luis PerezAún no hay calificaciones
- Grafeno Diapositivas FinalDocumento25 páginasGrafeno Diapositivas FinalMonica Burke100% (1)
- Oficio Múltiple #00007-2023-Minedu/Dm-Fondep-Fondep-G: Gerente Regional de Educación Director (A) Regional de EducaciónDocumento1 páginaOficio Múltiple #00007-2023-Minedu/Dm-Fondep-Fondep-G: Gerente Regional de Educación Director (A) Regional de EducaciónMaría MercedAún no hay calificaciones
- Sesion 2: Regresion Lineal MultipleDocumento12 páginasSesion 2: Regresion Lineal MultipleMarlon AlejdroAún no hay calificaciones
- Guía de Examen Derecho Procesal 1Documento3 páginasGuía de Examen Derecho Procesal 1vane.mendoza2304Aún no hay calificaciones
- Electrodos de Tungsteno Utilizados en Soldadura TigDocumento4 páginasElectrodos de Tungsteno Utilizados en Soldadura TigAndres PinedaAún no hay calificaciones
- Asociación Corredores Turismo Carretera Bogota 166 - CAPITAL FEDERAL - (1405) - TEL. 4905-1000 (TECNICA) INT. 137Documento97 páginasAsociación Corredores Turismo Carretera Bogota 166 - CAPITAL FEDERAL - (1405) - TEL. 4905-1000 (TECNICA) INT. 137Ruben SerraAún no hay calificaciones
- Empresas Peruanas Que Usan PLDocumento6 páginasEmpresas Peruanas Que Usan PLMaida Garay0% (1)
- Revisión Historia National Health ServiceDocumento34 páginasRevisión Historia National Health Serviceraulmd0% (1)
- DE743 Derecho Procesal AdministrativoDocumento2 páginasDE743 Derecho Procesal Administrativojair suAún no hay calificaciones
- Fao - Perfiles Nutricionales Por Paises PeruDocumento34 páginasFao - Perfiles Nutricionales Por Paises PeruaugustogiralAún no hay calificaciones
- Colpensiones Formato Información EPS PDFDocumento1 páginaColpensiones Formato Información EPS PDFAlacob Gruntel100% (1)
- Guia de Historia Del Trabajo Social HondurasDocumento5 páginasGuia de Historia Del Trabajo Social HondurasJudith MebarakAún no hay calificaciones
- Proyecto Final Daniela MartinezDocumento6 páginasProyecto Final Daniela MartinezDaniela MartinezAún no hay calificaciones
- Convenios en HigieneDocumento7 páginasConvenios en HigieneerwisAún no hay calificaciones