También podría gustarte
- Trabajo Final Riesgos HospitalariosDocumento33 páginasTrabajo Final Riesgos HospitalariosGustavo A. Rivera DAún no hay calificaciones
- Trabajo Final - Gustavo Rivera - NORMA ISO 31000Documento6 páginasTrabajo Final - Gustavo Rivera - NORMA ISO 31000Gustavo A. Rivera DAún no hay calificaciones
- PropuestaCalendarioAcadémico2014 2015 v2Documento1 páginaPropuestaCalendarioAcadémico2014 2015 v2Gustavo A. Rivera DAún no hay calificaciones
- La Sociedad de La Ignorancia - Antony BreyDocumento70 páginasLa Sociedad de La Ignorancia - Antony BreydcdiegoleonAún no hay calificaciones
- Inteligencia Colectiva Pierre Levy EspañolDocumento262 páginasInteligencia Colectiva Pierre Levy Españolbonny e eline50% (2)
- Informe Del SemáforoDocumento14 páginasInforme Del SemáforoJair Fernando HernandezAún no hay calificaciones
- Elpapel 50.pag. ConsecutivasDocumento24 páginasElpapel 50.pag. ConsecutivasGustavo A. Rivera DAún no hay calificaciones
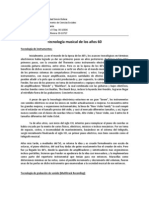
- Tecnologia Musical de Los 60Documento9 páginasTecnologia Musical de Los 60Gustavo A. Rivera DAún no hay calificaciones
- Oye Arnold! Donde Estás? Tomo 3Documento194 páginasOye Arnold! Donde Estás? Tomo 3Hebo_Freire1984100% (6)
- Schneider-Sist Int Equipo NemaDocumento27 páginasSchneider-Sist Int Equipo NemaJOSE LUIS LOPEZ GUTIERREZAún no hay calificaciones
- Especificaciones Tecnicas - Inst. SanitariasDocumento54 páginasEspecificaciones Tecnicas - Inst. SanitariasBEBEDINOAún no hay calificaciones
- Automatizacion de La Manufactura Proyecto ModularDocumento7 páginasAutomatizacion de La Manufactura Proyecto ModularMitzy PerezAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Teorico-Practico - Virtual - Gerencia de Producción - (Grupo b04)Documento5 páginasActividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Teorico-Practico - Virtual - Gerencia de Producción - (Grupo b04)Alonso Orejarena TrianaAún no hay calificaciones
- Procedimiento Configuracion Alarmas Rect HUAWEI 1.0Documento1 páginaProcedimiento Configuracion Alarmas Rect HUAWEI 1.0Lily Caceres YamparaAún no hay calificaciones
- Análisis financiero de Bluegrass Natural FoodsDocumento9 páginasAnálisis financiero de Bluegrass Natural FoodsHernández FrancysAún no hay calificaciones
- Perfil profesional Romulo EspinarDocumento26 páginasPerfil profesional Romulo EspinarKARINA CONDEZOAún no hay calificaciones
- N° de Orden 1Documento38 páginasN° de Orden 1daas estudio creativoAún no hay calificaciones
- Manual Abb, Especialidad.Documento83 páginasManual Abb, Especialidad.CHAYAN OMAR CRUZ VIDAUREAún no hay calificaciones
- Ejercicios de algoritmos para principiantesDocumento1 páginaEjercicios de algoritmos para principiantesSara GuzmanAún no hay calificaciones
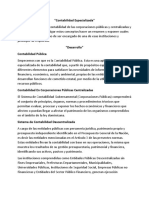
- Cont. Especializada 3ra UTESADocumento2 páginasCont. Especializada 3ra UTESARodrigo JavierAún no hay calificaciones
- COSTO PROMEDIO PONDERADO - ESTUDIANTES 20222 ResueltoDocumento12 páginasCOSTO PROMEDIO PONDERADO - ESTUDIANTES 20222 Resueltoestefany jimenezAún no hay calificaciones
- Foro 3 - Vanessa PulchaDocumento3 páginasForo 3 - Vanessa PulchaVanessa Kasandra Pulcha MontenegroAún no hay calificaciones
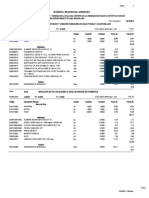
- Apu Infraestructura SanitariaDocumento1 páginaApu Infraestructura SanitariaManuel Masias MalbacedaAún no hay calificaciones
- Flujo Proctor Modificado UY S - 17 - 89Documento1 páginaFlujo Proctor Modificado UY S - 17 - 89jmario85Aún no hay calificaciones
- PR-PRO-06 - V01 - Reparacion de Obras de Arte y DrenajeDocumento7 páginasPR-PRO-06 - V01 - Reparacion de Obras de Arte y DrenajeCarlosVincedChirinosAún no hay calificaciones
- Convocatoria SILLONES DENTALESDocumento1 páginaConvocatoria SILLONES DENTALESDennis RoblesAún no hay calificaciones
- Arquitectura Hardware de Los Equipos de CómputoDocumento18 páginasArquitectura Hardware de Los Equipos de CómputopaitoramirezAún no hay calificaciones
- La Importancia de CBR en Los Pavimentos (Turnitin)Documento3 páginasLa Importancia de CBR en Los Pavimentos (Turnitin)Sc MejiaAún no hay calificaciones
- Lab Evaporador VacioDocumento2 páginasLab Evaporador VacioGuillermo Andres Velasco AlvarezAún no hay calificaciones
- PlataformasSatelitalesDocumento54 páginasPlataformasSatelitalesgroyeroAún no hay calificaciones
- Proyecto Final - 202106399Documento50 páginasProyecto Final - 202106399Alejandra De LeonAún no hay calificaciones
- Análisis MultivariadoDocumento19 páginasAnálisis MultivariadoMiguelLezamaAún no hay calificaciones
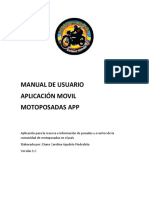
- ANEXO 3 Manual de UsuarioDocumento20 páginasANEXO 3 Manual de UsuarioyoanAún no hay calificaciones
- Cotización #073-2020Documento2 páginasCotización #073-2020charlycamposAún no hay calificaciones
- Ejemplo de Mapa Conceptual de Recursos Humanos PDFDocumento1 páginaEjemplo de Mapa Conceptual de Recursos Humanos PDFSandra Milena CRISTANCHO LEONAún no hay calificaciones
- 10 Preguntas Point - Herramientas y Técnicas de La CalidadDocumento2 páginas10 Preguntas Point - Herramientas y Técnicas de La CalidadSonnia PozoAún no hay calificaciones
- Control de Nivel y Temperatura de Un Tanque de Agua, en LabVIEW, PLC Y Arduino, Mediante La Comunicación ModbusDocumento9 páginasControl de Nivel y Temperatura de Un Tanque de Agua, en LabVIEW, PLC Y Arduino, Mediante La Comunicación ModbusPrimus 2018Aún no hay calificaciones
- AbacoDocumento1 páginaAbacoFranz Ever Quispe MolloAún no hay calificaciones