Documentos de Académico
Documentos de Profesional
Documentos de Cultura
03 Coupled Tanks SP
Cargado por
neoflashTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
03 Coupled Tanks SP
Cargado por
neoflashCopyright:
Formatos disponibles
control-systems-principles.co.uk.
Sistemas de Depsitos Acoplados 1
SISTEMAS DE DEPSITOS ACOPLADOS
Marco Antonio Prez Cisneros
*
y Elke Laubwald
+
*
Divisin de Electrnica y Computacin, CUCEI, Universidad de Guadalajara, Mxico.
+
Consultor Control Systems Principles
RESUMEN: Este es uno de una serie de artculos sobre modelado de sistemas, anlisis y
control preparado po control-systems-principples.co.uk para dar una introduccin a los
importantes principios y procesos de control. En los sistemas de control hay un gran nmero
de sistemas y mtodos genricos que son encontrados en todas las reas de la industria y la
tecnologa. Estos artculos tratan de explicar esos importantes sistemas y mtodos en
sencillos temas. El artculo describe lo que hace un tipo particular de mtodo/sistema, cmo
trabaja y cmo controlarlo. Las demostraciones de control estn desarrolladas usando
modelos de sistemas reales diseados por nuestro fundador Peter Wellstead, y desarrollado
por TQ Education and Training Ltd en su rango de equipamiento CE donde son mostrados
los resultados posibles del sistema real. Este manual trata acerca del problema ms comn de
control en sistemas de procesos prcticos, control del nivel de lquido. En adicin a los
procesos industriales, el control de nivel de lquidos es encontrado en muchos otros lugares,
como usted lo leer en seguida. El control de nivel de lquido y el modelado de ideas ser
demostrado usando nuestra versin de sistema estndar de libros de texto: El Sistema de
Depsitos Unidos. Este sistema ha venido a ser un diseo clsico del equipamiento en la
enseanza de control y usted puede verlo en muchos laboratorios de control alrededor del
mundo.
1. Por qu los Sistemas de Depsitos Acoplados?
El control del nivel de lquido en depsitos y el flujo entre ellos es un problema bsico en los procesos
industriales. Los procesos industriales requieren lquidos para ser bombeados, almacenados en tanques
y luego bombeados a otro tanque. Muchas veces el lquido ser procesado por tratamientos qumicos
en los tanques, pero siempre el nivel de fluido en los tanques debe ser controlado, y el flujo entre ellos
regulado. Con frecuencia los tanques son acomodados tan juntos que los niveles interactan lo cual
debe ser controlado tambin. El control del nivel y el flujo en tanques son el centro de todos los
sistemas de ingeniera qumica. Pero estos sistemas son tambin el centro de nuestra economa. Estas
son algunos tipos de industrias donde el control del nivel y el flujo son esenciales:
Industrias de Petroqumica.
Industrias de fabricacin de papel.
Industrias de tratamiento de agua.
Nuestras vidas son gobernadas por sistemas de control de nivel y flujo. Por ejemplo, la psicologa
mdica envuelve muchos sistemas de biocontrol de fludos. Los Biosistemas en nuestro cuerpo estn
para controlar el flujo de sangre alrededor de nuestro cuerpo. Otros biosistemas controlan la presin y
los niveles de qumicos en nuestro cuerpo. El bao de nuestra casa a departamento es tambin un
sistema de control del nivel de lquido. La palanca adjunta a la vlvula del tanque de la taza permite al
agua fluir dentro del tanque hasta que el flotador sube hasta un punto que cierra la vlvula. Este es un
simple y efectivo sistema de control del nivel para depsitos de agua. Aunque el bao es ahora comn,
el primer bao (taza de bao) en la villa de mi casa estaba en el Herrenahus. Era una cosa maravillosa.
Visitantes admiraban el bajante automtico del tanque de la taza de bao mucho ms que la belleza de
la casa y de nuestroa hermosa colonia.
Del asombroso Silveretta Hochalpenstrasse vers un sistema gigante de tanques acoplados-el
Silveretta Stausee. Este tiene 2034 metros de alto, yo creo que que es el ms profundo lago artificial en
Europa. El Silveretta Stausee est acoplado con el Vermunt Strausee de 1717 metros y con su sitema
elctrico es el sistema de depsitos acoplados ms alto y largo en el mundo. Los ingenieros que
disearon y construyeron estn muy orgullosos de su logro y pneles cercanos al Strausee describen el
proyecto.
Los sistemas de control del nivel del depsito estn en todos lados. Todos los procesos industriales, el
cuerpo humano y los sistemas que manejan fluidos dependen de sistemas de control de nivel. Es
esencial para ingenieros en sistemas de control entendr cmo trabajan los sistemas de control en los
depsitos y cmo es resuelto el problema del control del nivel. Es por esto que dee poner especial
atencin a lo que escrib. Un da usted podra tener que trabajar sobre un gran proyecto como el
Silveretta Strausee y Elke no estar siempre aqu para ayudarlo. La alternativa podra ser pasar su vida
reparando baos y en esta situacin Elke no podr ayudarlo.
2. Modelado de Sistemas de Depsitos Acoplados.
2.1 Modelo de depsito simple.
Es importante entender las matemticas de cmo se comportan los los sistemas de depsitos
acoplados. Este es un modelado de sistemas y es una parte importante de anlisis de sistemas de
control. Para empezar, observe un sistema de depsito simple en la figura 1.
Pump
Valve
H
Tank
(Cross Sectional
Area A)
Qi
Figura 1: Sistema de nivel con un solo tanque.
El modelo del sistema est determinado para relacionar el flujo Q
i
dentro del tanque con el flujo Q
o
dejando la vlvula al botn del tanque. Usando una ecuacin de equilibrio de flujo dentro del tanque, es
posible escribir:
dt
dH
A Q Q
o i
= (1)
donde A es el rea transversal del tanque y H es el peso del fluido.
Si la vlvula es diseada para comportarse como un orificio, entonces el fluido que pasa la vlvula ser
relacionado con el nivel de fluido en el tanque, H, por la expresin:
H g a C Q
d o
. 2 = (2)
En esta ecuacin a es el rea transversal del orificio, (en la prctica, el rea transversal ser dada por las
dimensiones de la vlvula y el canal de flujo en el cual est montado). C
d
es llamado el coeficiente de
descarga de la vlvula. Este coeficiente toma en cuenta todas las caractersticas del fluido, prdida e
irregularidades en el sistema como ambos lados de la ecuacin de balance. Y g =ctte. Gravitacional =
980 cm/sec
2
.
La ecuacin 2 toma a C
d
como una constante por lo que Q
o
tiene una relacin no lineal con el nivel H
para todas las posibles condiciones de operacin. Idealmente, la relacin no lineal est definida por la
ecuacin 2, pero en una vlvula real hay una ecuacin no lineal ms compleja. Combinando las
ecuaciones 1 y 2 tenemos:
i d
Q gH a C
dt
dH
A = + 2 (3)
Esta ecuacin es el modelo matemtico que describe el comportamiento del sistema, y podemos ver de
nuevo cosas no lineales en el modelado del sistema. Aparentemente es igual a mi artculo de Servo
Control, pero con una importante diferencia. En el problema del nivel del tanque la no linealidad es
suave y puede ser hecho lineal en un nivel particular de operacin H mediante el uso de la pendiente de
la no linealidad en la H. Esto tiene el resultado importante que el modelo del sistema linealizado tiene
parmetros que dependen de las condiciones de operacin. Los sistemas dinmicos cambiarn como los
cambios normales en el nivel de operacin. Por favor recuerde esto, porque es muy importante que el
controlador del nivel del tanque sea insensible para que el parmetro cambie en el modelo.
El modelo del sistema, (ecuacin 3), es una ecuacin diferencial d primer orden relacionando el nivel
de flujo de entrada, Q
i
, con el nivel de salida del agua, H. En orden, para disear un controlador lineal
para el nivel del tanque, debemos linealizar la ecuacin considerando pequeas variaciones h cerca del
nivel normal de operacin dl fluido en el tanque. La ecuacin es la siguiente:
h H H
o
+ =
Donde H
o
es el nivel normal de operacin, y es una constante, h es un pequeo cambio cercano a ese
nivel. Para pequeas variaciones de h cercanas a H
o
podemos aproximar la funcin no lineal mediante
la tangente de H
o
. Esto permite una ecuacin diferencial lineal:
i
q g h
dt
dh
T . = + (4)
Donde q
i
es la variacin en el flujo de entrada Q
i
, necesitado para mantener el nivel de operacin H
o
.
La constante de tiempo T y la ganancia g son funcin de los parmetros y niveles de operacin.
2.2 Modelo de Tanque Acoplado.
Cuando dos tanques estn juntos, se forma el sistema de tanques acoplados (figura 2). Cul es
el objetivo del control con los tanques acoplados? En los depsitos acoplados, los estados del
sistema son el nivel H
1
en el tanque 1 y el nivel H
2
en el tanque 2. Si la entrada de control es la
velocidad de flujo de la bomba Q
i
, entonces la variable para ser controlada sera normalmente el
segundo estado, el nivel H
2
, con disturbios causados por variaciones en el ndice de flujo del
sistema por la vlvula B o por cambios en la vlvula C. Es necesario construir un modelo para
cada uno de los niveles del tanque.
Para el Tanque 1, la ecuacin del equilibrio de flujo es:
dt
dH
A Q Q
b i
1
= (5)
donde la nueva variable es el ndice de flujo Q
b
del fluido del tanque 1 al tanque 2 a travs de la
vlvula B.
Para el Tanque 2 la ecuacin del equilibrio de flujo es:
dt
dH
A Q Q
c b
2
= (6)
La nueva variable el ndice de flujo Q
c
del fluido del Tanque 2 a travs de la Vlvula C.
Pump
Valve B
Valve C
H
1
Q
c
Tank Cross-Sectional
Areas, A
Qi
2
b
Figura 2: Un sistema de tanques acoplados.
El modelado del sistema viene de las dos ecuaciones de flujo y de la ecuacin no lineal para el flujo a
travs de las vlvulas. Si las vlvulas son orificios ideales, el sistema no lineal es de nuevo regida por
una raz cuadrada. Las dos ecuaciones de flujo para vlvulas ideales son:
dt
dH
A gH a C H H g a C
dt
dH
A H H g a C Q
c dc b db
b db i
2
2 2 1
1
2 1
2 ) ( 2
) ( 2
=
=
(7)
La ecuacin 7 describe los sistemas dinmicos de depsitos acoplados en su forma no lineal con
ecuaciones ideales para las vlvulas. En aplicaciones generales, la ley de la raz cuadrada es solamente
una aproximacin. Para disear los sistemas de control para los tanques acoplados las ecuaciones son
linealizadas mediante variaciones pequeas q
i
en Q
i
, h
1
en H
1
y h
2
en H
2
. Las variaciones son tomadas
con respecto a los niveles de operacin normales, H
1
o
y H
2
o
. La linealizacin de ecuaciones (7)
proporciona las ecuaciones de estado para los tanques acoplados:
2
1
2
1
1
2
1
22 21
12 11
2
1
1 0
0 1
0
x
x
h
h
q
A
x
x
k k
k k
x
x
i
&
&
(8)
Los coeficientes de la matriz d estados, son funcin de los niveles de operacin en los
tanques, y por lo tanto los parmetros del modelo de estado variarn de la misma forma que vara el
nivel de operacin. Favor de recordar que el sistema tiene variaciones dinmicas cuando usted habla
del controlador de diseo.
22 21 12 11
, , , k k k k
Modelos de transferencia de funciones son populares sistemas de procesos y por lo tanto, escribir
tambin la ecuacin de transferencia. Definiendo el sistema de salida para ser el nivel en el tanque 2 y
la entrada y la entrada como la bomba de flujo, la funcin de transferencia del tanque acoplado es:
( )( ) 1 1 ) (
) (
2 1
2
+ +
=
s T s T
G
s q
s h
i
(9)
La constante de tiempo T
1
y T
2
estn relacionados con los niveles de operacin en los tanques, con la
diferencia en los niveles de los tanques y son directamente proporcionales al rea transversal de los
tanques. Una vez le reclam a mi jefe que yo sala tarde de trabajar porque me tomaba mucho tiempo el
examinar una planta procesadora de leche con esos grandes depsitos. Se lo record repitiendo:
Grandes tanques hacen grande la constante de tiempo Ele, y una gran constante de tiempo puede
suavizar muchos problemas en los procesos.
2.3 Multi-entrada - Modelo de tanque acoplado
El sistema de tanques acoplados puede ser extendido en muchas formas. La forma ms interesante son
los tanques acoplados de multi entradas. Esto est hecho con otra bomba suministrando fluido al tanque
2 y otra vlvula permitiendo al fluido dejar el botn del tanque 1. Esto hace un sistema con dos salidas
interactuando (h
1
,h
2
) y dos entradas (q
1
,q
2
). El resultado es un interesante sistema multivariable con
muchas posibilidades de control (eso no incumbe a este artculo). Quiz algn da haga un artculo
sobre las cosas interesantes que se pueden hacer con el control multivariable. No por ahora.
3. Ejemplo de un sistema de control de tanques
La figura 3 muestra el sistema de Tanques Acoplados CE105. Esta representacin del problema del
control de los tanques acoplados se ha convertido en un sistema estndar entre los educadores de
sistemas de control, debido a que incluye todas las caractersticas importantes de controladores de nivel
y un diseo simple y flexible.
Figura 3. El sistema de tanques acopladors CE105
Las caractersticas de llave de los Tanques Acoplados pueden ser vistas en la figura 3. Hay dos tanques
ubicados lado por lado. En medio de ellos est una vlvula ajustable que puede ser usada para cambiar
el flujo en medio de los tanques. El botn de cada tanque es una vlvula ajustable que puede ser usada
para cambiar el flujo del tanque. A mano izquierda est una bomba controlada elctricamente la cual a
su vez controla el flujo dentro del primer tanque. Este flujo es controlado por una seal elctrica
aplicada al sistema de transmisin de la bomba de un sistema de control. Es tambin posible poner otra
bomba elctrica sobre el lado derecho del tanque 2 por lo que puede haber dos flujos de entrada hacia
el tanque controlados externamente. Las salidas son los niveles medidos en cada tanque. Usted puede
ver que los Tanques Acoplados pueden ser usados para representar diversos tipos diferentes de
controles de nivel. El ms simple es el controlador di nivel de un tanque, luego viene el controlador de
nivel para el doble tanque y el ms complejo es el de tanques acoplados multivariables. Usando las
vlvulas en diferentes posiciones los parmetros de los sistemas de control pueden ser alterados para
dar muchas combinaciones de constantes de tiempo e interacciones.
Recuerda mi historia acerca de tanques robustos? Bueno, los tanques acoplados han sido diseados
para dar constantes de tiempo en el rango de 50 a 200 segundos. Este rango da una idea de los
problemas en los sistemas de control de lenta respuesta, pero no tan lenta que usted tenga que estar toda
la noche para hacer mediciones.
4. Control de Nivel de los Tanque Acoplados.
Existen muchas teoras de diseo de controladores que pueden ser usadas para controlar el nivel de
fluido en los tanques. Todos los mtodos que enlist en mi artculo de Servo Control son posibles,
incluyendo el control confuso. Pero es importante conocer que los parmetros en los modelos de
sistemas de control de nivel pueden ser difciles de medir en forma exacta. Tambin el modelo de raz
cuadrada del flujo a travs de la vlvula es una aproximacin. A causa de esas incertidumbres, los
ingenieros prefieren medir las constantes de tiempo de los sistemas en forma experimental durante el
diseo y para usar leyes simples de control que tienen dos propiedades importantes:
Los tcnicos pueden afinar los sistemas de control sin mucho entrenamiento.
Las leyes de control trabajan aceptablemente aunque cambien los parmetros del sistema.
Debido a esos requerimientos es comn usar la famosa ley de control PID (proporcional, integral,
derivativa). En la siguiente seccin mostrar cmo esto podra ser hecho para un solo tanque de los
Tanques Acoplados. Para prepararse para esto, he cerrado la vlvula entre los tanques y cambi la
vlvula en el botn del tanque 1 por una media vlvula.
5. Ejemplo de un Diseo de Sistema de Control de Nivel
El problema especificado de control es mantener el nivel del fluido en el tanque 1 al punto medio. El
estado constante del voltaje de la bomba que mantiene el fluido a este nivel es aproximadamente de 3
volts. Tengo que construir un elevador de voltaje a pasos de 1 volt para el voltaje de la bomba y medir
la respuesta a pasos en el nivel del fluido. De aqu, encontr que la constante de tiempo T y ganancia g
para el primer modelo de ordenador son aproximadamente:
5 . 1
seconds 40
=
=
g
T
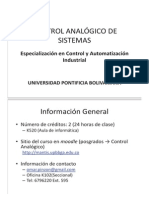
Estos resultados son aproximados porque la respuesta no es completamente estable como se muestra en
la figura de la prueba que hice (figura 4). Los niveles de flujo durante el examen y el punto final son
difciles de determinar y hay siempre algn ruido sobre la medicin del peso del fluido. Estos son
problemas comunes en sistemas reales. El problema puede ser sobrellevado con herramientas de
identificacin del sistema pero yo quiero mostrar mtodos que son fciles de usar con un mnimo de
equipamiento y cuando usted tenga que montar un controlador en corto tiempo.
250 300 350 400 450 500 550 600
4
4.5
5
5.5
6
6.5
7
Open loop step test on coupled tanks
time
measured
height
(volts)
Figura 4. Respuesta al escaln del nivel del tanque.
Personalmente no frecuento usar acciones derivativas en mis controladores y para controladores de
nivel es posible usar un controlador PI (Integrador extra proporcional, por sus siglas en ingls). El
trmino integral es usado para dar cero errores de estado y el trmino proporcional permite a la
velocidad de respuesta del lazo cerrado ser ajustada. Un experimentado ingeniero en procesos debera
ser capaz de activar el controlador PI despus de observar el examen y una pequea mirada a los
tamaos de las vlvulas de control en la lnea de alimentacin del tanque. De todos modos,
permtamelo hacerlo cientficamente: podemos aprender pequeos cortes despus. La ecuacin para
el controlador PI es:
+ =
t
i p
d e k t e k t u
0
) ( ) ( ) ( (10)
donde k
p
es la ganancia proporcional, k
i
es la ganancia de la integral, e(t) es el error entre la seal de
referencia r(t) y la salida y(t) y u(t) es la seal aplicada a la terminal de la bomba. Tomando la funcin
de transferencia de la ecuacin (10) y combinndola con la funcin de transferencia del modelo d
tanque simple, la ecuacin de lazo cerrado es:
i p i p
p i
gk gk s Ts
s d sg
gk gk s Ts
s r s k k g
s y
+ + +
+
+ + +
+
=
) 1 (
) ( ) (
) 1 (
) ( ) (
) (
2 2
(11)
Esta es la ecuacin del sistema de segundo orden, donde r(s) es la seal de referencia y d(s) es una
interrupcin al flujo del tanque. Podemos comparar los parmetros con la ecuacin estndar de segundo
orden y tomar valores de ganancia proporcional e integral para dar una frecuencia natural
desamortiguada deseada y un factor de amortiguamiento. Aqu estn algunos tips de Tante Elke para
disear el controlador PI:
La respuesta de segundo orden produce el rechazo de la alteracin de la funcin de transferencia,
esto es lo que normalmente se requiere debido a que el nivel de referencia es constante. La
respuesta a los cambios en la seal de referencia depender del numerador para la parte de la seal
de referencia de la funcin de transferencia tambin como el denominador.
Siempre debe checar la posicin de operacin del estado inmvil de las vlvulas y dispositivos en el
sistema. Las vlvulas de control deben ser operadas entre el 30 y 70% para las condiciones de
operacin normales. Sino podra haber un problema en el tamao de la vlvula.
Tenga cuidado de las respuestas en lazo cerrado que dan una gran ganancia de la integral; el
integrador puede finalizar y causar grandes problemas en el controlador.
Pruebe sus dispositivos sobre un simulador como el CE2000. Las simulaciones pueden revisar
rpidamente la respuesta aproximada y salvar muchos sintonizadores manuales del sistema real.
Por experiencia se que una frecuencia natural de 0.01 Hz y un factor de amortiguamiento de 1 puede
dar buenas respuestas a las alteraciones sin demasiadas acciones de control. El montado del sistema de
control para esto da los parmetros de control:
1 . 0 , 7 . 2 = =
i p
k k
Los valores de ganancia como esos son muy razonables, y el sistema de control es sintonizado
conservativamente. Ganancias mayores podran dar respuestas ms rpidas si se requieren. Las seales
de control para el actuador sern ms grandes y pueden tener un impacto negativo sobre las vlvulas y
motores. Mi jefe en la fbrica de productos lcteos me ha dicho que era correcto sintonizar el
controlador para ser muy rpido demasiado grande, como yo era el ingeniero quien haba venido en la
noche a la fbrica a reparar los sistemas de vlvulas. Despus de esto yo he sintonizado mis
controladores para que pueda dormir en las noches.
250 300 350 400 450 500
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Disturbance rejection of coupled tanks controller
Time in seconds
Measured
tank level
Figura 5. Rechazo de perturbaciones en el lazo cerrado del sistema de tanques acoplados.
Finalmente la figura 5 muestra la respuesta de rechazo a alteraciones para el sistema de control. La
seal de referencia es 3 volts (cerca de 40% de la capacidad del tanque) y el error fue hecho para abrir
la vlvula al 10%. El nivel se recupera despus de cerca de 60 segundos; esto podra ser hecho ms
rpido mediante la sintonizacin del controlador, pero yo solamente hara esto si la especificacin
requiere un sistema ms rpido. Tambin el controlador del sistema trabaja completamente bien cuando
la seal de referencia cambia (cambia el tiempo constantemente), por lo que hay algunas robusteces en
el controlador. No estoy haciendo un anlisis profundo de este tipo de sistemas debido a que es
demasiado simple pero mucha gente los hace.
6. Palabras finales de Elke
Espero que haya obtenido algunas ideas de la importancia de estos sistemas de control en este artculo.
Yo lamento decir que no es posible responder preguntas acerca de el contenido de nuestro artculo, a
menos que tengamos un contrato con su organizacin. Para ms informacin acerca del Sistema de
tanques acoplados CE105 o de la herramienta de simulacin CE2000 dirigirse al sitio web de TQ
Education and Training usando la liga de nuestro sitio web www.control-systems-principles.co.uk o
usar el correo electrnico info@tq.com. Para ms informacin sobre control integrasl extra
proporcional y control de tres trminos, revisar las siguientes pginas de nuestro sitio web, nosotros
planeamos un artculo sobre controlador de tres trminos y podra aparecer cuando usted lo vea. Si no
est, entonces sea paciente con nosotros. Para aprender ms sobre controladores de nivel lea un libro
sobre teora de control. Un libro que usamos es: Modern Control Systems, R.C. Dorf and R.H. Bishop,
Addison Wesley.
Aufwiedersehen!
Elke Laubwald
También podría gustarte
- 1 Electrodos para Soldar Aceros Al Carbono PDFDocumento22 páginas1 Electrodos para Soldar Aceros Al Carbono PDFRodrigo PaezAún no hay calificaciones
- Preparacion de Un Paper IeeeDocumento3 páginasPreparacion de Un Paper IeeeTrosquisito Juan FgpAún no hay calificaciones
- Metrologia Electric A, Mediciones Con PuentesDocumento15 páginasMetrologia Electric A, Mediciones Con PuentesGabriel Ch100% (1)
- Apunte PIDDocumento54 páginasApunte PIDapi-3713750100% (2)
- Diseño Del Controlador PIDDocumento37 páginasDiseño Del Controlador PIDBilly ElliotAún no hay calificaciones
- TP 101 PDFDocumento40 páginasTP 101 PDFEmilio Tamayo100% (1)
- Domotica AutomatasDocumento72 páginasDomotica AutomatasneoflashAún no hay calificaciones
- 05 Domótica - Proyectos y Normas - 2013-2Documento43 páginas05 Domótica - Proyectos y Normas - 2013-2neoflashAún no hay calificaciones
- Folleto LOGO Feb12Documento24 páginasFolleto LOGO Feb12Aile GómezAún no hay calificaciones
- 3.0 Sistemas de Control en Tiempo DiscretoDocumento54 páginas3.0 Sistemas de Control en Tiempo Discretoalexiel1806Aún no hay calificaciones
- Domotica AutomatasDocumento72 páginasDomotica AutomatasneoflashAún no hay calificaciones
- VIT@ Soluciones ViviendaDocumento8 páginasVIT@ Soluciones ViviendaneoflashAún no hay calificaciones
- CONTROLADORES Con SisotoolsDocumento14 páginasCONTROLADORES Con SisotoolsPlymouth Hemi BarracudaAún no hay calificaciones
- Dossier Del ProyectoDocumento4 páginasDossier Del ProyectoneoflashAún no hay calificaciones
- Scripts y FuncionesDocumento14 páginasScripts y FuncionesneoflashAún no hay calificaciones
- A A F (N) : Soluci On General de La Ecuaci ONDocumento108 páginasA A F (N) : Soluci On General de La Ecuaci ONneoflashAún no hay calificaciones
- Introducción A MATLAB, Toolbox de Control y SimulinkDocumento48 páginasIntroducción A MATLAB, Toolbox de Control y SimulinkJose Manuel Manuel LorenzoAún no hay calificaciones
- 07r2 Diagrama Root Locus v2Documento10 páginas07r2 Diagrama Root Locus v2neoflashAún no hay calificaciones
- Diseno de CompensadoresDocumento37 páginasDiseno de CompensadoresCarlos A Newball GAún no hay calificaciones
- 08 Diagramas en El Espacio de La Frecuencia v3Documento10 páginas08 Diagramas en El Espacio de La Frecuencia v3neoflashAún no hay calificaciones
- Prac 1Documento0 páginasPrac 1neoflashAún no hay calificaciones
- 03 Respuesta Transitoria x3Documento16 páginas03 Respuesta Transitoria x3neoflashAún no hay calificaciones
- Laboratorio (Sistemas de Ejecución de Manufactura)Documento3 páginasLaboratorio (Sistemas de Ejecución de Manufactura)neoflashAún no hay calificaciones
- 01 Contenido X4Documento5 páginas01 Contenido X4neoflashAún no hay calificaciones
- 05r2 Estabilidad de La Respuesta TransitoriaDocumento6 páginas05r2 Estabilidad de La Respuesta TransitorianeoflashAún no hay calificaciones
- 06r2 Errores en Regimen PermanenteDocumento5 páginas06r2 Errores en Regimen PermanenteneoflashAún no hay calificaciones
- Taller No 3 2013Documento2 páginasTaller No 3 2013neoflashAún no hay calificaciones
- 03 Respuesta Transitoria x3Documento16 páginas03 Respuesta Transitoria x3neoflashAún no hay calificaciones
- 02 Introduccion X3Documento10 páginas02 Introduccion X3neoflashAún no hay calificaciones