También podría gustarte
- Ejercicios Cap3Documento11 páginasEjercicios Cap3Paolo AmatoAún no hay calificaciones
- Ejemplo Solucion de EjerciciosDocumento12 páginasEjemplo Solucion de EjerciciosYair50% (2)
- Semana 4Documento13 páginasSemana 4Daniel Villanueva BautistaAún no hay calificaciones
- Perfil UPN Con PlatabandasDocumento8 páginasPerfil UPN Con PlatabandasManuel KronhausAún no hay calificaciones
- Trituradora Polverizadora ExtrusoraDocumento76 páginasTrituradora Polverizadora ExtrusoraJavier RuedaAún no hay calificaciones
- Historia de La ComputaciónDocumento4 páginasHistoria de La ComputaciónDaigo SisternesAún no hay calificaciones
- Pernos en Traccion Corte 1Documento16 páginasPernos en Traccion Corte 1Luis ArmandoAún no hay calificaciones
- TP4 TirantesDocumento7 páginasTP4 TirantesRobert Canario GamarraAún no hay calificaciones
- Mathcad - EJES-Estudio de Caso-Publicado33Documento20 páginasMathcad - EJES-Estudio de Caso-Publicado33Delfin Rosanieto Tapia100% (1)
- Pernos en CorteDocumento12 páginasPernos en CorteLuis ArmandoAún no hay calificaciones
- Diseño de EjesDocumento20 páginasDiseño de EjesErson Cruz LunaAún no hay calificaciones
- Apuntes de Placas de AnclajeDocumento7 páginasApuntes de Placas de AnclajeingenieralistaAún no hay calificaciones
- Resistencia de MaterialesDocumento218 páginasResistencia de MaterialesDiego Madrid MirandaAún no hay calificaciones
- Fundamentos de Mecanica de SolidosDocumento56 páginasFundamentos de Mecanica de SolidosNataly Vidal100% (1)
- Esfuerzo Normal y Deformación UnitariaDocumento27 páginasEsfuerzo Normal y Deformación UnitariaAlvaro Aquino Collarana75% (4)
- Metalicas 4 FlexiónDocumento40 páginasMetalicas 4 Flexiónrogelio barruetaAún no hay calificaciones
- Pernos en Traccion Corte 1Documento16 páginasPernos en Traccion Corte 1arturo yamparaAún no hay calificaciones
- Rez Is FinalDocumento5 páginasRez Is FinalRonaldcito Eduardo Portocarrero HoyoAún no hay calificaciones
- DISEÑO FRENOS y EMBRAGUES-FIMEDocumento66 páginasDISEÑO FRENOS y EMBRAGUES-FIMEcarlos alfredo garcia bellidoAún no hay calificaciones
- Finalizado Resistencia de Materiales 2Documento9 páginasFinalizado Resistencia de Materiales 2Qz LelisAún no hay calificaciones
- Borrador Proyecto DiseñoDocumento11 páginasBorrador Proyecto DiseñoFELIPEAún no hay calificaciones
- Ejemplo 03. - Zapata Aislada Cuadrada Carga ExcentricaDocumento7 páginasEjemplo 03. - Zapata Aislada Cuadrada Carga ExcentricameñoxAún no hay calificaciones
- Taller 1 Resistencia 2Documento4 páginasTaller 1 Resistencia 2Maria TorrealbaAún no hay calificaciones
- Tanque Seccion Circular ApoyadoDocumento27 páginasTanque Seccion Circular ApoyadoEdgar MattoAún no hay calificaciones
- Calculo Del Eje Principal y La Potencia Del MotorDocumento0 páginasCalculo Del Eje Principal y La Potencia Del Motorricasster100% (2)
- Examen Final Geotecnia IIDocumento18 páginasExamen Final Geotecnia IIJhon Alvaro HAún no hay calificaciones
- Vigas Sobre Terreno ElasticoDocumento9 páginasVigas Sobre Terreno ElasticoMelina Armand Pilon0% (1)
- Taludes FeleniusDocumento5 páginasTaludes FeleniusErik PaipayAún no hay calificaciones
- Cap 3 - PerdidasDocumento11 páginasCap 3 - PerdidasfernandoAún no hay calificaciones
- Modulos de ElasticidadDocumento0 páginasModulos de ElasticidadPatricio Santis CortésAún no hay calificaciones
- Taller16 DiseñoIIDocumento11 páginasTaller16 DiseñoIIDanielGodoyAún no hay calificaciones
- Integral de Linea, Integral de Superficie y Aplicaciones PDFDocumento54 páginasIntegral de Linea, Integral de Superficie y Aplicaciones PDFFranklin Vega GonzálesAún no hay calificaciones
- Elementos CurvosDocumento38 páginasElementos CurvosyefroAún no hay calificaciones
- Parte 3.7 y 3.8Documento10 páginasParte 3.7 y 3.8Julio César LópezAún no hay calificaciones
- Dimensionamiento de Cimentaciones Roberto Morales PDFDocumento37 páginasDimensionamiento de Cimentaciones Roberto Morales PDFHarold Campos100% (6)
- Flexion CompuestaDocumento7 páginasFlexion CompuestaBrian RichardsAún no hay calificaciones
- Metalicas 4 FlexiónDocumento40 páginasMetalicas 4 FlexiónMariaLuisaPerezAún no hay calificaciones
- Apuntes FRACTOTENACIDADDocumento4 páginasApuntes FRACTOTENACIDADElena Reinoso100% (1)
- Uniones ApernadasDocumento18 páginasUniones ApernadasRene D. ArrietaAún no hay calificaciones
- Formulario Diseño de Elementos de MaquinasDocumento9 páginasFormulario Diseño de Elementos de MaquinasjdAún no hay calificaciones
- Laboratorio Trabajo y EnergiaDocumento11 páginasLaboratorio Trabajo y EnergiaLeslyAún no hay calificaciones
- Diseño Eje 2323 2Documento7 páginasDiseño Eje 2323 2JUAN DAVID MOSQUERA GARCIAAún no hay calificaciones
- Ejercicio11 3Documento6 páginasEjercicio11 3David SernaAún no hay calificaciones
- Ejercicios UwuDocumento16 páginasEjercicios UwuAlexisツAún no hay calificaciones
- 14 F2 Fisica GeneralDocumento14 páginas14 F2 Fisica GeneralGademaraAún no hay calificaciones
- 1er. Parcial - Ing. RepettoDocumento9 páginas1er. Parcial - Ing. RepettoBraiam ManriqueAún no hay calificaciones
- Taller de Materiales 1Documento11 páginasTaller de Materiales 1DuvanAndresCastilloRodriguezAún no hay calificaciones
- Fatiga Alto CiclajeDocumento25 páginasFatiga Alto CiclajeLuis MadrigalAún no hay calificaciones
- MathcadProfessional LRFD HDocumento11 páginasMathcadProfessional LRFD HRoberto Andrés Fernández DomínguezAún no hay calificaciones
- S12.s1-Esfuerzo Cortante Transversal.Documento17 páginasS12.s1-Esfuerzo Cortante Transversal.Jhonatan VeraAún no hay calificaciones
- Alfredo Salazar Fernandez Proyecto de Suelos2Documento30 páginasAlfredo Salazar Fernandez Proyecto de Suelos2Alfredo Salazar FernandezAún no hay calificaciones
- Deber Iii de Cálculo VectorialDocumento26 páginasDeber Iii de Cálculo VectorialÁngel RomeroAún no hay calificaciones
- Análisis de Fatiga - Maestria Ingenieria MecanicaDocumento14 páginasAnálisis de Fatiga - Maestria Ingenieria MecanicaSERGIO7-SAún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- JET 10 Acid Storage v1 0 SPADocumento132 páginasJET 10 Acid Storage v1 0 SPAcardicampoAún no hay calificaciones
- Fatiga TérmicaDocumento63 páginasFatiga TérmicacardicampoAún no hay calificaciones
- Fundiciones FerreasDocumento28 páginasFundiciones FerreaspachawaynaAún no hay calificaciones
- Hurtado Espejo Raul Barras Corrugadas AceroDocumento86 páginasHurtado Espejo Raul Barras Corrugadas AcerocardicampoAún no hay calificaciones
- Analisis de Fallas en TuberiasDocumento146 páginasAnalisis de Fallas en Tuberiascardicampo100% (2)
- 00 Excel VBADocumento26 páginas00 Excel VBAJavier MallorquínAún no hay calificaciones
- Diseño Logico MEREDocumento44 páginasDiseño Logico MEREDavid AburtoAún no hay calificaciones
- Validez (Lógica)Documento3 páginasValidez (Lógica)AngieAún no hay calificaciones
- Logros Del Plan de ActividadesDocumento28 páginasLogros Del Plan de Actividadesdlanor1604Aún no hay calificaciones
- Diseño y Mod de Bases de DatosDocumento6 páginasDiseño y Mod de Bases de DatosManuel R Caravedo CAún no hay calificaciones
- CRM Porvenir FerreteriaDocumento35 páginasCRM Porvenir FerreteriaIssac LokaAún no hay calificaciones
- Perfil de Un Profesional Técnico en Mantenimiento y Soporte de ComputadorasDocumento2 páginasPerfil de Un Profesional Técnico en Mantenimiento y Soporte de ComputadorasTic Tic AscayoAún no hay calificaciones
- Datos de Panel - Un Enfoque PracticoDocumento57 páginasDatos de Panel - Un Enfoque PracticoJosé Edwind Chapilliquen Carmen100% (2)
- Manual de Corel Draw PDFDocumento43 páginasManual de Corel Draw PDFFranciscoyClaudia LeyesAún no hay calificaciones
- Taller Codificaciones Entrópicas - V2Documento2 páginasTaller Codificaciones Entrópicas - V2Laura Oladys LozanoAún no hay calificaciones
- Never Let UDocumento2 páginasNever Let USandraRomanAún no hay calificaciones
- Innature 6 Acta Del JuradoDocumento6 páginasInnature 6 Acta Del JuradoJuan Sebastián Barrios LópezAún no hay calificaciones
- Array o ArregloDocumento17 páginasArray o ArregloGabriel Ocampo CAún no hay calificaciones
- Procesamiento Con PD-GEM - Pablo CettaDocumento10 páginasProcesamiento Con PD-GEM - Pablo CettaChors ZannoliAún no hay calificaciones
- Mapa Conceptual Organico FuncionalDocumento1 páginaMapa Conceptual Organico FuncionalPaula Andrea TinocoAún no hay calificaciones
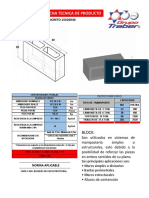
- Ficha Tecnica Block Hueco de Concreto 15X20X40 Linea Estructural NMX-C-404 PDFDocumento1 páginaFicha Tecnica Block Hueco de Concreto 15X20X40 Linea Estructural NMX-C-404 PDFPaco Casillas AstorgaAún no hay calificaciones
- Trinomio Al Cubo Problemas ResueltosDocumento3 páginasTrinomio Al Cubo Problemas ResueltosJaime Terrel Terrazos100% (1)
- Robot Araña Final 12Documento19 páginasRobot Araña Final 12J Burga QuinoAún no hay calificaciones
- La Hipermedia Es Un Nuevo Medio de ComunicaciónDocumento43 páginasLa Hipermedia Es Un Nuevo Medio de ComunicaciónDaniel Paredes100% (1)
- Decodificador BCD A 7 SegmentosDocumento17 páginasDecodificador BCD A 7 SegmentosJohnny VictoriaAún no hay calificaciones
- Qué Es TetraDocumento3 páginasQué Es TetraLiderly MonteroAún no hay calificaciones
- 02 - Practica Lenguaje Programacion - VentanasDocumento4 páginas02 - Practica Lenguaje Programacion - VentanassimonquispeluzaAún no hay calificaciones
- Taller Festo - Practica Nº 1 PDFDocumento7 páginasTaller Festo - Practica Nº 1 PDFMelii MartinezAún no hay calificaciones
- Concepto de Informatica y ComputadorDocumento4 páginasConcepto de Informatica y ComputadorFlor Medina MendezAún no hay calificaciones
- Funcion SizeofDocumento5 páginasFuncion SizeofLucas ProetoAún no hay calificaciones
- Carta Motivo Tania OlveraDocumento1 páginaCarta Motivo Tania Olveraapi-393634417Aún no hay calificaciones
- Guía Solución Losa Aligerada Con Sap 2000Documento25 páginasGuía Solución Losa Aligerada Con Sap 2000Irami PerezAún no hay calificaciones
- Clase III Mod Modelo ModsimDocumento10 páginasClase III Mod Modelo ModsimRosmery Vega SolisAún no hay calificaciones
- Test Recursos TecnologicosDocumento5 páginasTest Recursos TecnologicosGiovanna RodriguezAún no hay calificaciones