También podría gustarte
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Planificación de operaciones de manufactura y serviciosDe EverandPlanificación de operaciones de manufactura y serviciosCalificación: 3 de 5 estrellas3/5 (3)
- Investigacion de OperacionesDocumento184 páginasInvestigacion de Operacionesemner abel50% (2)
- Investigacion de OperacionesDocumento184 páginasInvestigacion de OperacionesANTHONY TUYA ZAMBRRANOAún no hay calificaciones
- ImportanteDocumento163 páginasImportanteRaul RojasAún no hay calificaciones
- Presentacion I D - SIS - 19Documento192 páginasPresentacion I D - SIS - 19nia corespiAún no hay calificaciones
- Investigacion de OperacionesDocumento182 páginasInvestigacion de OperacionesJoel Jonathan Alvarez100% (1)
- Investigacion de OperacionesDocumento132 páginasInvestigacion de OperacionesDeivis75% (8)
- 00 IntroduccionDocumento33 páginas00 IntroduccionRusslan Maydana VidalAún no hay calificaciones
- 01 Formulacion Programacion Lineal 1Documento33 páginas01 Formulacion Programacion Lineal 1Saul CamargoAún no hay calificaciones
- Intro Ducci OnDocumento33 páginasIntro Ducci OnDianaAún no hay calificaciones
- Introduccion IODocumento33 páginasIntroduccion IOMichelle LópezAún no hay calificaciones
- Semana 1 2017 01 AlumnoDocumento55 páginasSemana 1 2017 01 AlumnoMaryta MarytaAún no hay calificaciones
- Metodos Cuantitativos 2023Documento16 páginasMetodos Cuantitativos 2023olvera.cristianAún no hay calificaciones
- Io 1 InicialDocumento22 páginasIo 1 InicialSharian ViteriAún no hay calificaciones
- Unidadi Inv. Operativa IDocumento37 páginasUnidadi Inv. Operativa IluisAún no hay calificaciones
- Cap IDocumento54 páginasCap IFidel Gregory Castro RochaAún no hay calificaciones
- Semana 1 2016-02 ProfesorDocumento71 páginasSemana 1 2016-02 ProfesorHugo Enrique Oblitas SalinasAún no hay calificaciones
- PLANIFICACIONDocumento4 páginasPLANIFICACIONMatias RoggieroAún no hay calificaciones
- Tema1 Parte1Documento27 páginasTema1 Parte1Andres Miguel Cruz CalleAún no hay calificaciones
- 1 209 IntroduccionDocumento22 páginas1 209 IntroduccionAmanda CallaAún no hay calificaciones
- Investigacion de OperacionesDocumento6 páginasInvestigacion de OperacionesHerney MendozaAún no hay calificaciones
- EPII-IO1-01-Introduccion Investigacion OperacionesDocumento23 páginasEPII-IO1-01-Introduccion Investigacion OperacionesCarlos TecnicoAún no hay calificaciones
- Investigacion de OperacionDocumento111 páginasInvestigacion de Operacioncesar ayalaAún no hay calificaciones
- Guia 1 ORIGEN DE LA INVESTIGACIÓN DE OPERACIONESDocumento10 páginasGuia 1 ORIGEN DE LA INVESTIGACIÓN DE OPERACIONESJonathan Rangel0% (1)
- TablaDocumento8 páginasTablaThuKamiSan MartinAún no hay calificaciones
- Ing. de MetodosDocumento3 páginasIng. de MetodosnhevirosAún no hay calificaciones
- Investigacion OperativaDocumento52 páginasInvestigacion OperativaJosé ArelaAún no hay calificaciones
- Inv de OperacionesDocumento83 páginasInv de OperacionesMirna Brito0% (1)
- 1 IntroduccionDocumento14 páginas1 IntroduccionJean PiereAún no hay calificaciones
- Investigacion de OperacionesDocumento8 páginasInvestigacion de OperacionesJessicaAún no hay calificaciones
- Introducción ALA Investigación de OperacionesDocumento7 páginasIntroducción ALA Investigación de OperacionesRONERAún no hay calificaciones
- Unidad 1 (2018) AlumniiDocumento61 páginasUnidad 1 (2018) AlumniiDavid TorresAún no hay calificaciones
- Presentación 3 Unidad 1 - Introducción A La Investigación OperativaDocumento26 páginasPresentación 3 Unidad 1 - Introducción A La Investigación OperativaGuille Diaz MardonesAún no hay calificaciones
- Manual U1Documento27 páginasManual U1Ruben Lopez RicoAún no hay calificaciones
- Actividad01 ModelosMatemáticosDocumento7 páginasActividad01 ModelosMatemáticosMarielita MarielAún no hay calificaciones
- Investigación de Operaciones Programación LinealDocumento43 páginasInvestigación de Operaciones Programación LinealJACQUELIN GARCIA DELGADOAún no hay calificaciones
- SESIÓN 6 y 7 INVESTIGACION DE OPÉRACIONESDocumento84 páginasSESIÓN 6 y 7 INVESTIGACION DE OPÉRACIONESFelipe DelgadoAún no hay calificaciones
- Origen y Evolucion de La Investigacion de OperacionesDocumento9 páginasOrigen y Evolucion de La Investigacion de OperacionesAlfonso Liang33% (3)
- Metodos de OptimizaciónDocumento108 páginasMetodos de OptimizaciónLhitus69% (26)
- Taller 1 Presaberes Metodos DeterministicosDocumento12 páginasTaller 1 Presaberes Metodos DeterministicosYenifer Consuelo Garcia RojasAún no hay calificaciones
- I. Operaciones - TRABAJO 1Documento6 páginasI. Operaciones - TRABAJO 1Tania Yataco AvalosAún no hay calificaciones
- Origen y Evolucion de La Investigacion de OperacionesDocumento9 páginasOrigen y Evolucion de La Investigacion de OperacionesFiorella SatiAún no hay calificaciones
- 2023D1 Ind250 Trabajoautonomo1Documento9 páginas2023D1 Ind250 Trabajoautonomo1Doménica MuñozAún no hay calificaciones
- Investigacion de Operaciones Conceptos BasicosDocumento9 páginasInvestigacion de Operaciones Conceptos Basicosariel candelarioAún no hay calificaciones
- La Investigación de OperacionesDocumento23 páginasLa Investigación de OperacionesJesús Cano50% (2)
- Unidad 1 PPT ProfeDocumento97 páginasUnidad 1 PPT ProfeBARBARA SIERRAAún no hay calificaciones
- 1ra Semana 2017 IIDocumento57 páginas1ra Semana 2017 IIWilfredo Cusquisiban OcasAún no hay calificaciones
- Trabajo Colaborativo 01Documento7 páginasTrabajo Colaborativo 01Maritza CarvajalAún no hay calificaciones
- InvestigacionDocumento12 páginasInvestigacionMayra S RAún no hay calificaciones
- Investigación de OperacionesDocumento39 páginasInvestigación de OperacionesJonathanAgurtoVargasAún no hay calificaciones
- Introduccion A IO1 - Clase 1Documento21 páginasIntroduccion A IO1 - Clase 1ANA MELGARAún no hay calificaciones
- Investigacion de Operaciones EnsayoDocumento4 páginasInvestigacion de Operaciones EnsayoleninAún no hay calificaciones
- X 1 MAAD IO Unidad 1Documento76 páginasX 1 MAAD IO Unidad 1Angi Paty Magaña MadrigalAún no hay calificaciones
- 1ra Semana 2019 I A INVOPE IDocumento43 páginas1ra Semana 2019 I A INVOPE IValentina De Guadalupe Espinoza CastañedaAún no hay calificaciones
- Ingenieria de Procesos - R1Documento10 páginasIngenieria de Procesos - R1Polita PauAún no hay calificaciones
- Material 1Documento10 páginasMaterial 1Luzmayra ValdiviaAún no hay calificaciones
- Actividad N 2 Cuadro SinopticoDocumento5 páginasActividad N 2 Cuadro SinopticoLisbey chaconAún no hay calificaciones
- S01 - Introducción Simulación EmpresarialDocumento20 páginasS01 - Introducción Simulación EmpresarialYasmín DomínguezAún no hay calificaciones
- Modelado y simulación de redes. Aplicación de QoS con opnet modelerDe EverandModelado y simulación de redes. Aplicación de QoS con opnet modelerAún no hay calificaciones
- AlmendraDocumento1 páginaAlmendraPedro LpAún no hay calificaciones
- Primera Unidad - Sem 07-Sesion13 - Trabajo IndividualDocumento4 páginasPrimera Unidad - Sem 07-Sesion13 - Trabajo IndividualPedro LpAún no hay calificaciones
- Tesis Cueros TauroDocumento138 páginasTesis Cueros TauroPedro LpAún no hay calificaciones
- Ejercicio Individual Sesion 14 SoliworksDocumento2 páginasEjercicio Individual Sesion 14 SoliworksPedro LpAún no hay calificaciones
- Proyecto de Tesis (Nieto Carbajal, Leidy)Documento43 páginasProyecto de Tesis (Nieto Carbajal, Leidy)Pedro LpAún no hay calificaciones
- Examen ParcialDocumento2 páginasExamen ParcialPedro LpAún no hay calificaciones
- RrtyrtyDocumento4 páginasRrtyrtyPedro LpAún no hay calificaciones
- Trabajo Diseño - Lino PonceDocumento1 páginaTrabajo Diseño - Lino PoncePedro LpAún no hay calificaciones
- Trabajo Diseño Industrial-KenyiDocumento1 páginaTrabajo Diseño Industrial-KenyiPedro LpAún no hay calificaciones
- Lino PonceDocumento3 páginasLino PoncePedro LpAún no hay calificaciones
- Trabajo Diseño Industrial-KenyiDocumento1 páginaTrabajo Diseño Industrial-KenyiPedro LpAún no hay calificaciones
- Nieto CarbajalDocumento27 páginasNieto CarbajalPedro LpAún no hay calificaciones
- Problemas de IO - Industrial - 22 IIDocumento17 páginasProblemas de IO - Industrial - 22 IIPedro LpAún no hay calificaciones
- RtyrtyDocumento4 páginasRtyrtyPedro LpAún no hay calificaciones
- Metodos Numericos (Cuaderno Virtual) - QuirozDocumento72 páginasMetodos Numericos (Cuaderno Virtual) - QuirozPedro LpAún no hay calificaciones
- Kenin - Capitulo 5 y 6Documento24 páginasKenin - Capitulo 5 y 6Pedro LpAún no hay calificaciones
- Metodos Numericos (Cuaderno Virtual) - QuirozDocumento72 páginasMetodos Numericos (Cuaderno Virtual) - QuirozPedro LpAún no hay calificaciones
- Metodos NuméricosDocumento26 páginasMetodos NuméricosPedro LpAún no hay calificaciones
- FritzDocumento67 páginasFritzPedro LpAún no hay calificaciones
- Metodos NuméricosDocumento26 páginasMetodos NuméricosPedro LpAún no hay calificaciones
- Cuaderno Virtual Melgarejo Campos JeancarloDocumento62 páginasCuaderno Virtual Melgarejo Campos JeancarloPedro LpAún no hay calificaciones
- Cap 123Documento22 páginasCap 123Pedro LpAún no hay calificaciones
- KENIN - Capitulo 1Documento12 páginasKENIN - Capitulo 1Pedro LpAún no hay calificaciones
- Capitulo 9Documento12 páginasCapitulo 9Pedro LpAún no hay calificaciones
- KENIN - Capitulo 4 - 4.2Documento7 páginasKENIN - Capitulo 4 - 4.2Pedro LpAún no hay calificaciones
- Capitulo 13 y 14Documento641 páginasCapitulo 13 y 14Pedro LpAún no hay calificaciones
- %la Suma de Los Numeros Naturales: For ForDocumento4 páginas%la Suma de Los Numeros Naturales: For ForPedro LpAún no hay calificaciones
- Unidad 10Documento2 páginasUnidad 10Pedro LpAún no hay calificaciones
- Capítulo XiDocumento5 páginasCapítulo XiPedro LpAún no hay calificaciones
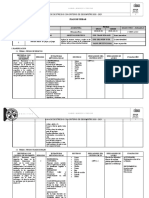
- PLAN Destrezas Con C. de D. Primero Unidad 1 20 - 21Documento5 páginasPLAN Destrezas Con C. de D. Primero Unidad 1 20 - 21Rubén RodasAún no hay calificaciones
- Manual de Electronica y Electricidad BásicaDocumento180 páginasManual de Electronica y Electricidad BásicaIsmael Pinto100% (2)
- Enseñando Los Primeros PrincipiosDocumento76 páginasEnseñando Los Primeros Principioswilliam82% (11)
- Griego Del Nuevo Testamento para Principiantes - J Gresham MachenDocumento258 páginasGriego Del Nuevo Testamento para Principiantes - J Gresham MachenCarolina Liendro100% (10)
- 8 Al 12 Noviembre 1°-2° Sec. Sesion 4-Exp.8-EptDocumento5 páginas8 Al 12 Noviembre 1°-2° Sec. Sesion 4-Exp.8-EptZOILA GINA VILLANUEVA HORNAAún no hay calificaciones
- Municipio Escolar Grupo DPCCDocumento3 páginasMunicipio Escolar Grupo DPCCRosa Cristina CORTEZ PALOMINO100% (1)
- Taller 10. El Afiche PublicitarioDocumento3 páginasTaller 10. El Afiche PublicitarioOlga GalvisAún no hay calificaciones
- 2022-04-07 - Matematica 3eroDocumento4 páginas2022-04-07 - Matematica 3eroJAMES MARLON VIERA HUERTASAún no hay calificaciones
- Cuadro de Notas DIVERSIFICADODocumento8 páginasCuadro de Notas DIVERSIFICADOMes IvanAún no hay calificaciones
- Modulo Nuevo 2021Documento87 páginasModulo Nuevo 2021maria salinasAún no hay calificaciones
- Centros Educativo Ciclo20112012 PDFDocumento355 páginasCentros Educativo Ciclo20112012 PDFJose manuel Gomez vecerraAún no hay calificaciones
- OCDE Cap. 1Documento44 páginasOCDE Cap. 1JULIANA ANDREA BARRERA ARDILAAún no hay calificaciones
- Gestion de Recursos Humanos Basado en CompetenciasDocumento55 páginasGestion de Recursos Humanos Basado en CompetenciasfelipeAún no hay calificaciones
- Formato de ReferenciaciónDocumento5 páginasFormato de ReferenciaciónJose Arley Maigual TimaranAún no hay calificaciones
- Decreto 2888 de 2007Documento46 páginasDecreto 2888 de 2007rymendozap100% (1)
- Secuencia TE CUENTO UN CUENTODocumento3 páginasSecuencia TE CUENTO UN CUENTOGisela RaticaAún no hay calificaciones
- Balotario Mat. 4to Grado - Ii Bimestre-2021Documento2 páginasBalotario Mat. 4to Grado - Ii Bimestre-2021Ronald PCAún no hay calificaciones
- Normativa de Convivencia para El Uso de Dispositivos ElectrónicosDocumento3 páginasNormativa de Convivencia para El Uso de Dispositivos ElectrónicosAriannaWolfAún no hay calificaciones
- Rubrica de Fanzine La Edad Del PavoDocumento1 páginaRubrica de Fanzine La Edad Del PavoJenny Torres VillarroelAún no hay calificaciones
- Atletismo-Sesiones Grados 4-5Documento28 páginasAtletismo-Sesiones Grados 4-5Yina Marcela Riascos MondragonAún no hay calificaciones
- Agüero 3.1 Diagrama ConflictosDocumento2 páginasAgüero 3.1 Diagrama ConflictosJeovany AgüeroAún no hay calificaciones
- Sentencia T-007 19Documento6 páginasSentencia T-007 19AngeOCAún no hay calificaciones
- Tarea E3Documento3 páginasTarea E3Laydi Carina Escalante AriasAún no hay calificaciones
- Oferta Academica - ESPEDocumento1 páginaOferta Academica - ESPEalvaro_arcvAún no hay calificaciones
- Planeacion de TicsDocumento3 páginasPlaneacion de TicsThalyCalderónAún no hay calificaciones
- Trabajo Final 1 Sistema OperativoDocumento3 páginasTrabajo Final 1 Sistema OperativoNegocios B2B0% (1)
- RAL Trastornos Del Desarrollo Del Lenguaje y La ComunicaciónDocumento3 páginasRAL Trastornos Del Desarrollo Del Lenguaje y La ComunicaciónIsabella MárquezAún no hay calificaciones
- DIAPOSITIVADocumento12 páginasDIAPOSITIVAjasscrisirazAún no hay calificaciones
- Examen Física 1bgu - Opción ADocumento8 páginasExamen Física 1bgu - Opción AJhair LoachaminAún no hay calificaciones
- Guion y Video Minuto de DiosDocumento4 páginasGuion y Video Minuto de DiosMayen Hernandez RamirezAún no hay calificaciones