También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Microcontrolador Pic16f628 e Instrucciones Gama MediaDocumento35 páginasMicrocontrolador Pic16f628 e Instrucciones Gama MediaCristian Salazar EspinozaAún no hay calificaciones
- Modulo UsartDocumento37 páginasModulo UsartEduardo GarciaAún no hay calificaciones
- Manual de Practicas ATMega 8535Documento61 páginasManual de Practicas ATMega 8535JUAN DIAZ MAMANIAún no hay calificaciones
- Microcontroladores AVRDocumento3 páginasMicrocontroladores AVRMarcos EstrellaAún no hay calificaciones
- Libropic CarlosDocumento193 páginasLibropic CarlosLazaro Raul Sanchez Castañeda33% (3)
- Curso MikrobasicDocumento9 páginasCurso MikrobasicEdson RodasAún no hay calificaciones
- Inductometro de Nueva Electronica Lx1731Documento14 páginasInductometro de Nueva Electronica Lx1731Paco Pill100% (1)
- Videojuego Con Pic - Pasoa PasoDocumento20 páginasVideojuego Con Pic - Pasoa PasoJean Pierre Cordova ArismendizAún no hay calificaciones
- P07 Programacion en MikroPascal PDFDocumento6 páginasP07 Programacion en MikroPascal PDFllomnAún no hay calificaciones
- Introduccion A Sistemas Embebidos PDFDocumento11 páginasIntroduccion A Sistemas Embebidos PDFClaudia AlejandraAún no hay calificaciones
- Programacion MSP430 TI Version 1.7 NoviembreDocumento39 páginasProgramacion MSP430 TI Version 1.7 NoviembreJaime Nunez CovarrubiasAún no hay calificaciones
- Manejo de LCD y GLCDDocumento18 páginasManejo de LCD y GLCDLuisHernandezAún no hay calificaciones
- Introducción xc8Documento12 páginasIntroducción xc8Samuel Jose Torres Casarrubia100% (1)
- PIC16F877 Con MikroCDocumento161 páginasPIC16F877 Con MikroCAre Granda100% (1)
- Comunicación I2C PDFDocumento22 páginasComunicación I2C PDFNoe Minga CalderonAún no hay calificaciones
- Comunicación Serial 16F877ADocumento17 páginasComunicación Serial 16F877AClintonSemanate100% (1)
- Atmega164p EspañolDocumento378 páginasAtmega164p EspañolMarco SolísAún no hay calificaciones
- Informe 1 - Funcionamiento Pic16f628aDocumento17 páginasInforme 1 - Funcionamiento Pic16f628aDavid RomeroAún no hay calificaciones
- Pic 16F877 2Documento67 páginasPic 16F877 2Dan Tabarez100% (1)
- El Módulo Adc de Los Avr PDFDocumento27 páginasEl Módulo Adc de Los Avr PDFmi_papiAún no hay calificaciones
- Clase 07 Arduino Con LCDDocumento5 páginasClase 07 Arduino Con LCDJair100% (1)
- Curso en C para Pic CcsDocumento91 páginasCurso en C para Pic CcsOmar SolanoAún no hay calificaciones
- Bootloader USB para PIC18F4550 A FullDocumento9 páginasBootloader USB para PIC18F4550 A Fullhackheredgar100% (2)
- Cómo Hacer Un Capacímetro DigitalDocumento22 páginasCómo Hacer Un Capacímetro DigitalAntonio José Montaña Pérez de CristoAún no hay calificaciones
- Ccs Protocolo SpiDocumento29 páginasCcs Protocolo SpiMario Andres Caceres Nocera0% (1)
- Curso de Microcontroladores PIC16F87XDocumento69 páginasCurso de Microcontroladores PIC16F87XUlises Aguilar100% (1)
- Ccs Eeprom PWMDocumento51 páginasCcs Eeprom PWMMario Andres Caceres NoceraAún no hay calificaciones
- Ccs Arreglos y Manejo de PuertosDocumento40 páginasCcs Arreglos y Manejo de PuertosMario Andres Caceres Nocera100% (1)
- Microcontroladores PIC18F4550.Documento15 páginasMicrocontroladores PIC18F4550.Gabriel Acevedo lopezAún no hay calificaciones
- Intro EmbebidosDocumento34 páginasIntro EmbebidosHarry PradoAún no hay calificaciones
- Banda TransportadoraDocumento13 páginasBanda TransportadoraAlejandro Fabian Torres CamachoAún no hay calificaciones
- Introducción A ArduinoDocumento52 páginasIntroducción A ArduinoAnny MurilloAún no hay calificaciones
- Apuntes de Programacion Pic 16f877a Con PicbasicDocumento51 páginasApuntes de Programacion Pic 16f877a Con PicbasicRene Gonzales VasquezAún no hay calificaciones
- Curso de Programación de PIC en PICBasic Pro - Página 4Documento93 páginasCurso de Programación de PIC en PICBasic Pro - Página 4Rene Gonzales VasquezAún no hay calificaciones
- Ruleta ElectroonicaDocumento6 páginasRuleta ElectroonicaWalter MoraAún no hay calificaciones
- Semáforo Con Un PIC16F628Documento3 páginasSemáforo Con Un PIC16F628Saul RamirezAún no hay calificaciones
- PARTE 5 - Tipos de Variables en ProtónDocumento3 páginasPARTE 5 - Tipos de Variables en ProtónEsteticoAún no hay calificaciones
- Microcontroladores Historia - Arquitectura AplicacionesDocumento89 páginasMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniAún no hay calificaciones
- Matriz de LedDocumento11 páginasMatriz de LedAndrés Samuel Barrientos Rodríguez0% (1)
- Manual PIC 18F4550-1Documento244 páginasManual PIC 18F4550-1Sandro Julián Panana EspinoAún no hay calificaciones
- PIC16F877 - MicrocontroladoresDocumento140 páginasPIC16F877 - MicrocontroladoresJuniorChavezPeralta100% (1)
- Unidad 4 MicrocontroladoresDocumento45 páginasUnidad 4 MicrocontroladoresOchoa JoshuaAún no hay calificaciones
- OPAMDocumento12 páginasOPAMHayashi MateoAún no hay calificaciones
- Libro Proyectos Pic Basic PDFDocumento12 páginasLibro Proyectos Pic Basic PDFAdimaro50% (2)
- 3 Progra Del Microcontrolador en Ensamblador (3) (2792)Documento32 páginas3 Progra Del Microcontrolador en Ensamblador (3) (2792)Alfredo Pacheco ZapataAún no hay calificaciones
- Configurar El BlueTooh HC-05Documento29 páginasConfigurar El BlueTooh HC-05Sara Lucia Rueda JaramilloAún no hay calificaciones
- Curso CX8-v6Documento71 páginasCurso CX8-v6Sky BlackAún no hay calificaciones
- AVR Practica 2 - InterrupcionesDocumento6 páginasAVR Practica 2 - InterrupcionesLiiz SarabiaAún no hay calificaciones
- Pic MicroDocumento51 páginasPic MicrosibiklandiaAún no hay calificaciones
- Alarma Microprocesada para AutomotorDocumento8 páginasAlarma Microprocesada para AutomotorWilson Quispe QuispeAún no hay calificaciones
- Convertidores ADCDocumento15 páginasConvertidores ADCFERNANDO AYALA PEREZAún no hay calificaciones
- Senati Pic87Documento31 páginasSenati Pic87carlosbuitronAún no hay calificaciones
- Diseño de Robot Velocista de CompetenciaDocumento4 páginasDiseño de Robot Velocista de CompetenciaAlex Alvarez HuillcaAún no hay calificaciones
- AtmegaDocumento8 páginasAtmegaGovanna LunaAún no hay calificaciones
- LCD y GLCD Con Pic 16f877a (Informe 4)Documento26 páginasLCD y GLCD Con Pic 16f877a (Informe 4)davicho47100% (2)
- Pic16f877 en Español1Documento20 páginasPic16f877 en Español1silviog100% (90)
- Características Ventajas y Desventajas Del MicrocontroladorDocumento9 páginasCaracterísticas Ventajas y Desventajas Del MicrocontroladorXavierMartinez50% (2)
- Clase 9 El MICROCONTROLADOR - Familia PIC 16xxxDocumento28 páginasClase 9 El MICROCONTROLADOR - Familia PIC 16xxxMilton100% (2)
- Microcontroladores PIC16F873Documento10 páginasMicrocontroladores PIC16F873Cesar LaraAún no hay calificaciones
- 6°plan Lector - 04-05 2021Documento4 páginas6°plan Lector - 04-05 2021Andres Juan de dios CuadradoAún no hay calificaciones
- Horario 2020 IIDocumento2 páginasHorario 2020 IIAndres Juan de dios CuadradoAún no hay calificaciones
- Tablas TermodinámicasDocumento34 páginasTablas TermodinámicasAndres Juan de dios CuadradoAún no hay calificaciones
- Solicitud de Pase Personal LaboralDocumento1 páginaSolicitud de Pase Personal LaboralAndres Juan de dios CuadradoAún no hay calificaciones
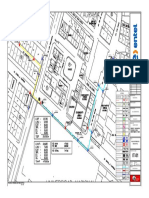
- OSINERGMIN PASCO-Layout1Documento1 páginaOSINERGMIN PASCO-Layout1Andres Juan de dios CuadradoAún no hay calificaciones
- Microcontroladores PIC16F87x PDFDocumento58 páginasMicrocontroladores PIC16F87x PDFAndres Juan de dios CuadradoAún no hay calificaciones
- Modelo Plan de Tesis Pos GradoDocumento65 páginasModelo Plan de Tesis Pos GradoAndres Juan de dios CuadradoAún no hay calificaciones
- Herramientas EtlDocumento7 páginasHerramientas EtlAndres Juan de dios CuadradoAún no hay calificaciones
- Práctica Dirigida IIIDocumento2 páginasPráctica Dirigida IIIAndres Juan de dios CuadradoAún no hay calificaciones
- Material de Lectura y Desarrollo Capitulo III, IV y VDocumento27 páginasMaterial de Lectura y Desarrollo Capitulo III, IV y VAndres Juan de dios Cuadrado100% (1)
- Diapositivas-Dinámica de SistemasDocumento15 páginasDiapositivas-Dinámica de SistemasAndres Juan de dios CuadradoAún no hay calificaciones
- Legado Edwards Deminig - 1Documento12 páginasLegado Edwards Deminig - 1Andres Juan de dios CuadradoAún no hay calificaciones
- Intel Vs AmdDocumento2 páginasIntel Vs AmdUriel Eden Bernal EvangelistaAún no hay calificaciones
- Seguridad en Sistemas Informáticos SSAYDocumento4 páginasSeguridad en Sistemas Informáticos SSAYATZIRI YOSELINE SANCHEZ SALAZARAún no hay calificaciones
- Síntomas Placa Base Estropeada (Consejos y Trucos) ?Documento15 páginasSíntomas Placa Base Estropeada (Consejos y Trucos) ?Alberto YepezAún no hay calificaciones
- Calculadora de 4 BitsDocumento20 páginasCalculadora de 4 Bitsdanielpro0% (1)
- Monitorización de Procesos - Navarro Romero Erika YamilethDocumento8 páginasMonitorización de Procesos - Navarro Romero Erika YamilethErika Navarro RomeroAún no hay calificaciones
- Bus de Campo HartDocumento3 páginasBus de Campo HartEnlace de Posgrados ElectronicaAún no hay calificaciones
- Parcial SODocumento3 páginasParcial SOjeiison realesAún no hay calificaciones
- Contadores A Asincrono y Flip Flop J-KDocumento6 páginasContadores A Asincrono y Flip Flop J-KEdwin GonzalezAún no hay calificaciones
- ManualcentralDocumento75 páginasManualcentralToni Pérez SaavedraAún no hay calificaciones
- Mapa Conceptual de Elctronica IndutrialDocumento3 páginasMapa Conceptual de Elctronica IndutrialNatalie Meza CastillejosAún no hay calificaciones
- Manual Tecnico NuevoDocumento97 páginasManual Tecnico NuevoSergio Andres Hernandez OvalleAún no hay calificaciones
- Saber U1-ASDocumento10 páginasSaber U1-ASFabian IbarraAún no hay calificaciones
- Tarea Capítulos de Lectura Sobre Java Edrei BujalilDocumento3 páginasTarea Capítulos de Lectura Sobre Java Edrei BujalilSopa de FideosAún no hay calificaciones
- 1.ediciones y Versiones de Visual Studio: ¿Cómo, Cuál y Dónde Conseguirlo? Instalarlo.Documento47 páginas1.ediciones y Versiones de Visual Studio: ¿Cómo, Cuál y Dónde Conseguirlo? Instalarlo.Marcelo Chamorro100% (4)
- HowTolibrerias ProcessingDocumento7 páginasHowTolibrerias ProcessingdennysregAún no hay calificaciones
- Redes MultiplexadasDocumento15 páginasRedes MultiplexadasMarcos Josué Flores GarcíaAún no hay calificaciones
- 2 E1 Eval Pavimentos 050407 PDocumento56 páginas2 E1 Eval Pavimentos 050407 PAngel Llanos MamaniAún no hay calificaciones
- Diagramas de Bloques Tarea PDFDocumento12 páginasDiagramas de Bloques Tarea PDFZavala Paéz AlejandroAún no hay calificaciones
- Información PLCs Siemens y Allen BradleyDocumento8 páginasInformación PLCs Siemens y Allen BradleykevmorenoAún no hay calificaciones
- Candado ElectronicoDocumento3 páginasCandado ElectronicoJose Carlos Velazquez SaldañaAún no hay calificaciones
- Taller 3 Soporte TecnicoDocumento6 páginasTaller 3 Soporte TecnicoLuis Olaya RodriguezAún no hay calificaciones
- Informe Final Proyecto MecatronicoDocumento11 páginasInforme Final Proyecto MecatronicoMartin08D0% (1)
- Manual Medcal S v10!09!2016 - EsDocumento30 páginasManual Medcal S v10!09!2016 - Esjon1224Aún no hay calificaciones
- Quinta Generacion de ComputadorasDocumento9 páginasQuinta Generacion de Computadorascris100% (2)
- Guía #6 Alicaciones de Thevenin Norton y Max Potencia (ReDocumento8 páginasGuía #6 Alicaciones de Thevenin Norton y Max Potencia (ReAlexis CDAún no hay calificaciones
- Cap3 PDFDocumento32 páginasCap3 PDFingenieroelectricistacuAún no hay calificaciones
- Power ScopeDocumento128 páginasPower Scopehugo0% (2)
- Practica 6Documento5 páginasPractica 6JokerTHAún no hay calificaciones
- Examen de WordDocumento2 páginasExamen de WordJosemaria GuerraAún no hay calificaciones
- Cómo Convierto Un Entero A Punto Flotante y Viceversa en Un Controlador RockwellDocumento2 páginasCómo Convierto Un Entero A Punto Flotante y Viceversa en Un Controlador Rockwellferancontreras100% (1)