También podría gustarte
- Electricidad BasicaDocumento32 páginasElectricidad BasicaKenny LoyolaAún no hay calificaciones
- Los Campos de Cognicion - Sesha - Segunda Edicion - Marzo 2014 PDFDocumento301 páginasLos Campos de Cognicion - Sesha - Segunda Edicion - Marzo 2014 PDFafonso26Aún no hay calificaciones
- Analisis 2 ForoDocumento1 páginaAnalisis 2 ForoManuel Tenorio BustamanteAún no hay calificaciones
- Hidrología Semana 14 PizarroDocumento70 páginasHidrología Semana 14 PizarroManuel Tenorio BustamanteAún no hay calificaciones
- Legislacion AnllilyDocumento2 páginasLegislacion AnllilyManuel Tenorio BustamanteAún no hay calificaciones
- Daniel CastroDocumento2 páginasDaniel CastroManuel Tenorio BustamanteAún no hay calificaciones
- Carmen Vargas AmasifuenDocumento7 páginasCarmen Vargas AmasifuenManuel Tenorio BustamanteAún no hay calificaciones
- Max Henry TrabajoDocumento3 páginasMax Henry TrabajoManuel Tenorio BustamanteAún no hay calificaciones
- Tematica - FII-01 - (Parte 1)Documento15 páginasTematica - FII-01 - (Parte 1)Manuel Tenorio BustamanteAún no hay calificaciones
- Anllily Pizango Tananta PDFDocumento4 páginasAnllily Pizango Tananta PDFManuel Tenorio BustamanteAún no hay calificaciones
- Repaso Dinámica 1era ParteDocumento34 páginasRepaso Dinámica 1era ParteManuel Tenorio BustamanteAún no hay calificaciones
- Análisis de Datos CuantitativosDocumento5 páginasAnálisis de Datos CuantitativosAurora MartinezAún no hay calificaciones
- Laboratorio N ViscocidadDocumento11 páginasLaboratorio N ViscocidadCecilia Aldana GuadalupeAún no hay calificaciones
- Numeros Naturales Enteros IDocumento11 páginasNumeros Naturales Enteros IvictorveasAún no hay calificaciones
- El UniversoDocumento20 páginasEl UniversoJustin Danilo Picon Espinel100% (1)
- WDocumento17 páginasWMaria Irene Coronado ArechagaAún no hay calificaciones
- Actividades de Refuerzo Derivadas IIDocumento2 páginasActividades de Refuerzo Derivadas IIAmorcito LobelthicoAún no hay calificaciones
- ColuDocumento2 páginasColuVivian Paloma Hernández ZetinaAún no hay calificaciones
- Prueba de Conceptos Capítulo 11 CUESTIONARIODocumento5 páginasPrueba de Conceptos Capítulo 11 CUESTIONARIOsehidy gabriela caamal pucAún no hay calificaciones
- Ficha Técnica INGEPAC EF MDDocumento2 páginasFicha Técnica INGEPAC EF MDAldoAún no hay calificaciones
- Test de Analogias Cogenericas - 1 en Tests-GratisDocumento4 páginasTest de Analogias Cogenericas - 1 en Tests-GratisFrancisco Alvarez ColonAún no hay calificaciones
- Modelos para AnalizarDocumento4 páginasModelos para AnalizarJonatan Isaac Huaman AraujoAún no hay calificaciones
- Lab 03Documento24 páginasLab 03Lalo Paolo Perez CamiloAún no hay calificaciones
- EF - LD - Catalogo Rele de LineaDocumento2 páginasEF - LD - Catalogo Rele de LineaAdrian CoelloAún no hay calificaciones
- Informe Final de Hidrologia 2014Documento22 páginasInforme Final de Hidrologia 2014joelAún no hay calificaciones
- Sesion 6 Función Sales Haloideas y OxisalesDocumento22 páginasSesion 6 Función Sales Haloideas y OxisalesJhoel Loayza100% (1)
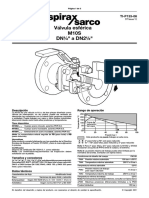
- Válvulas Esféricas M10S DN " A DN2 "-Hoja TécnicaDocumento3 páginasVálvulas Esféricas M10S DN " A DN2 "-Hoja TécnicaEmiliano CenturiónAún no hay calificaciones
- Taller 1 Lineas TEMDocumento3 páginasTaller 1 Lineas TEMEmily LopezAún no hay calificaciones
- Sesion 10, El MultimetroDocumento35 páginasSesion 10, El MultimetroHamer Quiroz CastañedaAún no hay calificaciones
- Segmentacion - Basica MIPSDocumento57 páginasSegmentacion - Basica MIPSVictor100% (1)
- Malla - Curricular - 2022 NovenoDocumento2 páginasMalla - Curricular - 2022 NovenoPAOLA RAMIREZAún no hay calificaciones
- Propiedades Del ÁtomoDocumento6 páginasPropiedades Del ÁtomomariselaAún no hay calificaciones
- 2 Semana ProblemasDocumento8 páginas2 Semana ProblemasAristotle100% (1)
- Ie Oscar Interes SimpleDocumento7 páginasIe Oscar Interes SimpleAlejandro RodriguezqAún no hay calificaciones
- Codigo BCDDocumento22 páginasCodigo BCDKarla MiguelAún no hay calificaciones
- Ficha 18 - Conexión y Puesta en Marcha de Aparatos de CocciónDocumento17 páginasFicha 18 - Conexión y Puesta en Marcha de Aparatos de CocciónJosé PerezAún no hay calificaciones
- Experiment OsDocumento69 páginasExperiment OsLeonardo AlfaroAún no hay calificaciones
- Clase 1Documento128 páginasClase 1Dhante DhanteAún no hay calificaciones
- Juan Moises Ricardo GOMEZ QUISPE - Cuaderno de Teoría - Cinemática - MRUDocumento7 páginasJuan Moises Ricardo GOMEZ QUISPE - Cuaderno de Teoría - Cinemática - MRUjuan gomezAún no hay calificaciones