También podría gustarte
- Integrales Funciones VectorialesDocumento4 páginasIntegrales Funciones VectorialesLuis Adrian CamachoAún no hay calificaciones
- BANCO DE PREGUNTAS Estabilidad y Tipología de EstructurasDocumento3 páginasBANCO DE PREGUNTAS Estabilidad y Tipología de EstructurasErick Pardo Chávez100% (1)
- Informe 5.1 Mecanismo de 4 BarrasDocumento21 páginasInforme 5.1 Mecanismo de 4 BarrasMichael Alexander Rodriguez Urbina100% (1)
- Ejer4 7Documento2 páginasEjer4 7Jaime Andree Andree Jaime0% (1)
- Desarrollo de Programa de MecanismosDocumento201 páginasDesarrollo de Programa de MecanismosManuel BerrellezaAún no hay calificaciones
- Manuelactividad1 PDFDocumento3 páginasManuelactividad1 PDFManuel F Davila Salcedo100% (3)
- Sitemas de PotenciaDocumento3 páginasSitemas de PotenciaHector VergaraAún no hay calificaciones
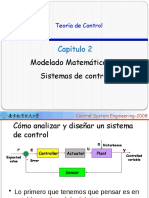
- 2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlDocumento77 páginas2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (1)
- 2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuDocumento20 páginas2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuHector VergaraAún no hay calificaciones
- Antropología EducativaDocumento13 páginasAntropología EducativaHector VergaraAún no hay calificaciones
- Anillos ResonantesDocumento33 páginasAnillos ResonantesHector VergaraAún no hay calificaciones
- Procesamieno Digital de SeñalesDocumento5 páginasProcesamieno Digital de SeñalesHector VergaraAún no hay calificaciones
- Propiedades MecanicasDocumento10 páginasPropiedades MecanicasHector VergaraAún no hay calificaciones
- 2019ch4EquilibriodeCuerposRigidos ESTDocumento24 páginas2019ch4EquilibriodeCuerposRigidos ESTHector VergaraAún no hay calificaciones
- Semejanzas en El PlanoDocumento90 páginasSemejanzas en El PlanoGuadalupe SolisAún no hay calificaciones
- Conceptos Teoricos Ejercicio 1Documento39 páginasConceptos Teoricos Ejercicio 1luz marina grimaldos rojasAún no hay calificaciones
- Lectura 3.1cristales Imperfectos y DeformaciónDocumento4 páginasLectura 3.1cristales Imperfectos y DeformaciónnarayoskiAún no hay calificaciones
- Curvas QVDocumento5 páginasCurvas QVjavierAún no hay calificaciones
- Paginas Libros - Folleto Fisica 1Documento48 páginasPaginas Libros - Folleto Fisica 1The Ink MusicAún no hay calificaciones
- El Movimiento RectilíneoDocumento15 páginasEl Movimiento RectilíneoalenunezAún no hay calificaciones
- SEGMENTOSDocumento8 páginasSEGMENTOSPaul Erick100% (1)
- CV DeLaCruz Reyes Francisco Javier T1Documento31 páginasCV DeLaCruz Reyes Francisco Javier T1javierAún no hay calificaciones
- Glosario 1. 1roalbDocumento51 páginasGlosario 1. 1roalbEvelyn LasluisaAún no hay calificaciones
- Investigacion Unidad 3 Funciones Vectoriales PDFDocumento7 páginasInvestigacion Unidad 3 Funciones Vectoriales PDFBrendaEthelGómezAún no hay calificaciones
- Mapa Conceptual FisicaDocumento6 páginasMapa Conceptual FisicaElías AbregoAún no hay calificaciones
- F. Eléctrica Doc 17 - 2021Documento6 páginasF. Eléctrica Doc 17 - 2021FireMen XxXAún no hay calificaciones
- 1.introduccion y Algebra de VectoresDocumento8 páginas1.introduccion y Algebra de VectoresTuesta Merma Alisson Brisa NicoleAún no hay calificaciones
- Actividad 7 Cuadro Comparativo de Las Matrices EFI, PEYEA, MMGODocumento4 páginasActividad 7 Cuadro Comparativo de Las Matrices EFI, PEYEA, MMGOYurleidis Vega GuzmanAún no hay calificaciones
- Espacio Vectorial Con Producto Interno y Sus PropiedadesDocumento12 páginasEspacio Vectorial Con Producto Interno y Sus PropiedadesUriel Horta ChiAún no hay calificaciones
- 1 19Documento19 páginas1 19Harumi Sanchez AguilarAún no hay calificaciones
- S03.s2 - Material CalAvanDocumento17 páginasS03.s2 - Material CalAvanNael Mallqui DíazAún no hay calificaciones
- Física - Ejercicicos de EstáticaDocumento5 páginasFísica - Ejercicicos de EstáticaDAVIDAún no hay calificaciones
- Conjunto OrtogonalDocumento5 páginasConjunto OrtogonalAlëx VazquezAún no hay calificaciones
- Informe Analisis Matematico IIIDocumento12 páginasInforme Analisis Matematico IIIAlvaro CastroAún no hay calificaciones
- Cartilla - EFQ - Ingreso FAyA 2024Documento121 páginasCartilla - EFQ - Ingreso FAyA 2024Ana Gabriela OllerAún no hay calificaciones
- Flujo InviscidoDocumento3 páginasFlujo InviscidoPatricia AgurtoAún no hay calificaciones
- VECTORES Segundo ParcialDocumento21 páginasVECTORES Segundo ParcialRimbert Muriel AbastoAún no hay calificaciones
- Practica 3 VectoresDocumento17 páginasPractica 3 VectoresJuan Pablo Diaz LoezaAún no hay calificaciones