También podría gustarte
- Manual de ScrivenerDocumento88 páginasManual de Scrivenermousescribd93% (15)
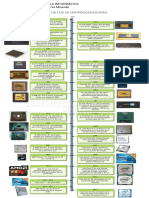
- Linea de Tiempo de La Historia de Los MicropocesadoresDocumento1 páginaLinea de Tiempo de La Historia de Los MicropocesadoresDiego Miranda67% (6)
- Bluetooth, Wifi, Wi MAXDocumento15 páginasBluetooth, Wifi, Wi MAXMonkda92Aún no hay calificaciones
- Tarjeta EmpresaDocumento1 páginaTarjeta EmpresaAlex PintadoAún no hay calificaciones
- Preguntas DSPDocumento11 páginasPreguntas DSPAlex PintadoAún no hay calificaciones
- ECOLOGÍADocumento3 páginasECOLOGÍAAlex PintadoAún no hay calificaciones
- Tarea 1Documento15 páginasTarea 1Alex PintadoAún no hay calificaciones
- Practica1 Circuito LogicoDocumento7 páginasPractica1 Circuito LogicoAlex PintadoAún no hay calificaciones
- Revision Sobre Los Sistemas OperativosDocumento8 páginasRevision Sobre Los Sistemas OperativosAlex PintadoAún no hay calificaciones
- DH CP ServerDocumento9 páginasDH CP ServerAlex PintadoAún no hay calificaciones
- Medidor de Nivel de AguaDocumento12 páginasMedidor de Nivel de AguaAlex PintadoAún no hay calificaciones
- Instrument Ac I OnDocumento32 páginasInstrument Ac I OnAlex PintadoAún no hay calificaciones
- Practica 1 Reconocimiento Del Banco Electro NeumaticaDocumento10 páginasPractica 1 Reconocimiento Del Banco Electro NeumaticaAlex PintadoAún no hay calificaciones
- Características, Ventajas-Desventajas-distorsión-ruido-Atenuación-Interferencia de Los Medios de ComunicaciónDocumento3 páginasCaracterísticas, Ventajas-Desventajas-distorsión-ruido-Atenuación-Interferencia de Los Medios de ComunicaciónAlex Pintado100% (1)
- Curso Diseno Paginas Web Dreamweaver Cs5Documento11 páginasCurso Diseno Paginas Web Dreamweaver Cs5erneseduAún no hay calificaciones
- Implementacion Del Flip-Flop en Compuertas LogicasDocumento5 páginasImplementacion Del Flip-Flop en Compuertas Logicasrosaura lozano50% (2)
- Copia de MAPA DE REGISTROS ATMEGA328PDocumento52 páginasCopia de MAPA DE REGISTROS ATMEGA328Pluis quiñonezAún no hay calificaciones
- Separata S2 Variables C#Documento5 páginasSeparata S2 Variables C#alex.pacheco.moyaAún no hay calificaciones
- Tarea - Pizarras VirtualesDocumento6 páginasTarea - Pizarras VirtualesHelenBelénDesiderioPortillaAún no hay calificaciones
- Tema5 EXTRA-3 Gestion de InterbloqueoDocumento92 páginasTema5 EXTRA-3 Gestion de InterbloqueoCAún no hay calificaciones
- Tesis Jesus SanchezDocumento198 páginasTesis Jesus SanchezHansem RosasAún no hay calificaciones
- Slide-Software Sesión 16 Semana 6 PDFDocumento38 páginasSlide-Software Sesión 16 Semana 6 PDFSteven RuizAún no hay calificaciones
- Cuandro Comparativo Prezzi y PPT - Ayrton - OrtizDocumento1 páginaCuandro Comparativo Prezzi y PPT - Ayrton - OrtizAyrton OrtizAún no hay calificaciones
- Manual Sitop Planillas ContratistaDocumento11 páginasManual Sitop Planillas ContratistaSantiago MorenoAún no hay calificaciones
- 12.1.4.4 Lab - Mobile Device FeaturesDocumento4 páginas12.1.4.4 Lab - Mobile Device FeaturesELVIS EMANUEL SANDOVAL SUAREZAún no hay calificaciones
- MULTIPLEXORDocumento6 páginasMULTIPLEXORGuara Lazaro pintoAún no hay calificaciones
- Adriana SalinasDocumento8 páginasAdriana SalinasAdriana SalinasAún no hay calificaciones
- E LVM 0 00 e Pe 766 - Eo PDFDocumento30 páginasE LVM 0 00 e Pe 766 - Eo PDFvaleriojesusAún no hay calificaciones
- Terminos ClavesDocumento5 páginasTerminos ClavesAlexa CardozaAún no hay calificaciones
- Practica 5. TPITDocumento11 páginasPractica 5. TPITEngel Mrn19Aún no hay calificaciones
- Léame de Illustrator CS5.1Documento8 páginasLéame de Illustrator CS5.1Murilo SantiagoAún no hay calificaciones
- Cuestioanrio de Pruebas de SoftwareDocumento2 páginasCuestioanrio de Pruebas de SoftwareJuan AlbertoAún no hay calificaciones
- Curso de Electrónica - Electrónica Digital - Parte 9 - Contadores Digitales (CUR6002S)Documento32 páginasCurso de Electrónica - Electrónica Digital - Parte 9 - Contadores Digitales (CUR6002S)PabloAún no hay calificaciones
- Análisis Sintáctico DescendenteDocumento7 páginasAnálisis Sintáctico DescendenteMiguel Enrique Junior Zavaleta RojasAún no hay calificaciones
- Diagnostico Error de Conexion InalambricaDocumento19 páginasDiagnostico Error de Conexion InalambricaRoman Torres AspirosAún no hay calificaciones
- Pasos Seguir FeDocumento4 páginasPasos Seguir FeEdgar R CastañonAún no hay calificaciones
- Anexo - Cuadros de Cargas Sistemas de DistribuciónDocumento7 páginasAnexo - Cuadros de Cargas Sistemas de DistribuciónMyller Oliveros GarciaAún no hay calificaciones
- Training Brochure SplitDocumento50 páginasTraining Brochure SplitNeftalí RojasAún no hay calificaciones
- Introduccion Al STEP7 PDFDocumento16 páginasIntroduccion Al STEP7 PDFJuan ChazarraAún no hay calificaciones
- Instrucciones de Istalacion Janitza-Inst-Umg96pq-L-EsDocumento6 páginasInstrucciones de Istalacion Janitza-Inst-Umg96pq-L-EsMacielAún no hay calificaciones
- Planteamiento Del ProblemaDocumento10 páginasPlanteamiento Del ProblemaBarreto CrAún no hay calificaciones